角点专题

OpenCV从入门到精通——角点特征点提取匹配算法实战
harris角点 角点可以是两个边缘的角点;角点是邻域内具有两个主方向的特征点;角点通常被定义为两条边的交点,更严格的说,角点的局部邻域应该具有两个不同区域的不同方向的边界。或者说,角点就是多条轮廓线之间的交点。像素点附近区域像素无论是在梯度方向、还是在梯度幅值上都发生较大的变化。一阶导数(即灰度的梯度)的局部最大所对应的像素点;两条及两条以上边缘的交点;图像中梯度值和梯度方向的变化速率都很高的
【第二部分 图像处理】第3章 Opencv图像处理进阶【6角点检测 D】
6.4自定义角点检测 6.4.1自定义角点检测概述 前文讲解了利用Harris进行角点检测和利用Shi-Tomasi方法进行角点检测外,也可以自己制作角点检测的函数:使用cornerEigenValsAndVecs()函数和minMaxLoc()函数结合来模拟Harris角点检测,或者使用cornerMinEigenVal()函数和minMaxLoc()函数结合来模拟Shi-Tomasi角点检
【第二部分 图像处理】第3章 Opencv图像处理进阶【6角点检测 C】
6.3亚像素角点检测 6.3.1 亚像素角点检测 前文讲解了利用Harris进行角点检测和利用Shi-Tomasi方法进行角点检测外,如果对角点的精度有更高的要求,可以用cornerSubPix()函数将角点定位到子像素,从而取得亚像素级别的角点检测效果。 6.3.2 亚像素角点检测:cornerSubPix()函数 cornerSubPix()函数讲解 C++: void corn
【第二部分 图像处理】第3章 Opencv图像处理进阶【6角点检测 B】
6.2 Shi-Tomasi角点检测 6.2.1 Shi-Tomasi角点检测概述及原理 Shi-Tomasi 算法是Harris 算法的改进。Harris 算法最原始的定义是将矩阵 M 的行列式值与 M 的迹相减,再将差值同预先给定的阈值进行比较。后来Shi 和Tomasi 提出改进的方法,若两个特征值中较小的一个大于最小阈值,则会得到强角点。 参考论文:hi and C. Tomasi.
【第二部分 图像处理】第3章 Opencv图像处理进阶【6角点检测 A】
6.1 Harris 角点检测 6.1.1角点检测概述及原理 关于兴趣点(interest points) 在图像处理和与计算机视觉领域,兴趣点(interest points),或称作关键点(keypoints)、特征点(feature points) 被大量用于解决物体识别,图像识别、图像匹配、视觉跟踪、三维重建等一系列的问题。我们不再观察整幅图,而是选择某些特殊的点,然后对他们进行局部

数字图像处理【14】特征检测——Harris角点检测
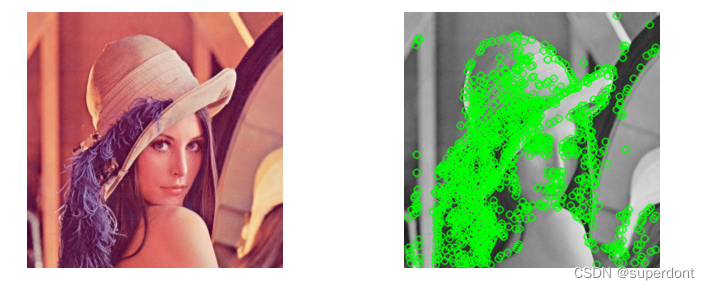
在上一篇文章已经介绍了opencv特征检测中的一些必要的概念,介绍了什么是特征,什么是角点,这些角点特征可以做什么。今天来看看对于我们人来说很容易就识别到角点特征,对于计算机来说是如何识别的,具体的步嘴原理是怎样的。 一、计算机中的角点 在众多的检测算法里最经典的角点特征检测就是Harris角点检测,它是一个特别好的方法,由Chris Harris和Mike Stephens于1988年提出。
学习OpenCV范例(二十)——角点检测算法
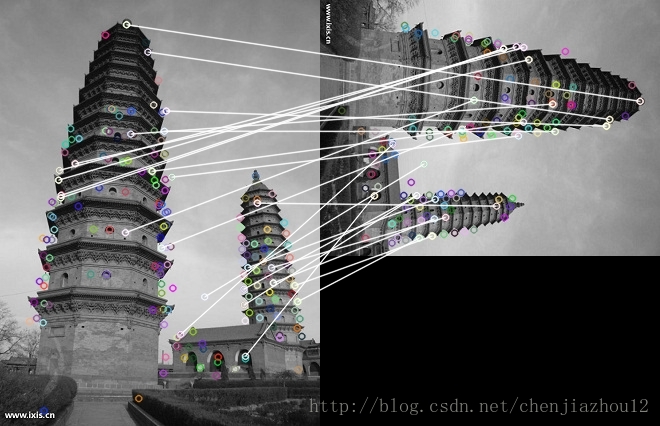
原文地址:http://blog.csdn.net/chenjiazhou12/article/details/22683049 本次范例讲的都是检测角点的算法,在这里我们会讲到,harris角点检测,Shi-Tomasi角点检测,FAST角点检测,尺度不变surf检测,尺度不变sift检测,特征点的描述。由于是算法问题,相对来说会比较复杂,而且都是一些比较经典的算法,如果只是纯粹的想要用

光流 | 图像特征匹配:特征光流与角点特征
/********************************************************** github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ***********************************************************/

图像处理 【角点检测】
头文件 #include <opencv2/imgproc.hpp> 函数 void cv::cornerEigenValsAndVecs ( InputArray src,OutputArray dst,int blockSize,int ksize,int borderType = BORDER_DEFAULT )
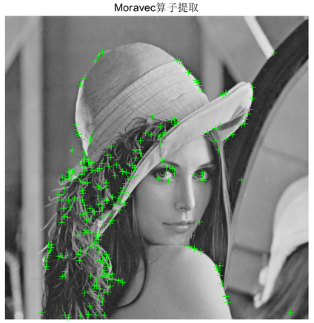
计算机视觉与模式识别实验2-1 角点检测算法(Harris,SUSAN,Moravec)
文章目录 🧡🧡实验流程🧡🧡Harris算法SUSAN算法Moravec算法 🧡🧡全部代码🧡🧡 🧡🧡实验流程🧡🧡 Harris算法 Harris算法实现步骤: w表示窗函数,在这个算法中,用于对梯度图像的平方进行滤波,以减少图像中的噪声,从而提高角点检测的准确性。R(i,j) 表示图像中像素点 (i,j) 处的角点响应值。这个值描述了在该像素点周围区域

OpenCV自学笔记14:Harris角点检测实例
Harris角点检测实例 本节使用到的图片: # -*- coding:utf-8 -*-import cv2import numpy as np# Step1. 加载图像、转化为灰度图img = cv2.imread('images/checkerboard.jpg')gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)gray = np.fl
32 OpenCV Harris角点检测
文章目录 cornerHarris 算子示例 角点检测 cornerHarris 算子 void cv::cornerHarris ( InputArray src,OutputArray dst,int blockSize,int ksize,double K,int borderType = BORDER_DEFAULT)src:待检测Harris角点的输入图像,图像
基于harris角点和RANSAC算法的图像拼接matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 MATLAB2022a 3.部分核心程序 .......................................................................I1_harr

OpenCV基本图像处理操作(十)——图像特征harris角点
角点 角点是图像中的一个特征点,指的是两条边缘交叉的点,这样的点在图像中通常表示一个显著的几角。在计算机视觉和图像处理中,角点是重要的特征,因为它们通常是图像中信息丰富的区域,可以用于图像分析、对象识别、3D建模等多种应用。 角点的识别可以帮助在进行图像匹配和跟踪时提供稳定的参考点,这是因为角点在图像中的位置比较容易通过算法检测出来,且不易受到视角变化的影响。因此,角点检测在视觉系统中非常重要
![[转]【OpenCV入门教程之十六】OpenCV角点检测之Harris角点检测](https://img-blog.csdn.net/20140608114107484?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvcG9lbV9xaWFubW8=/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/SouthEast)
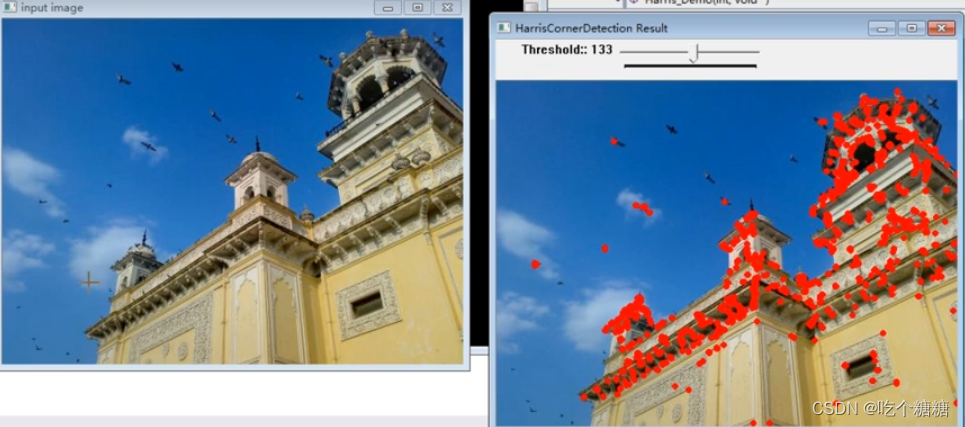
[转]【OpenCV入门教程之十六】OpenCV角点检测之Harris角点检测
文章来自浅墨_毛星云: http://blog.csdn.net/poem_qianmo/article/details/29356187 本篇文章中,我们一起探讨了OpenCV中Harris角点检测相关的知识点,学习了OpenCV中实现Harris角点检测的cornerHarris函数的使用方法。此博文一共有两个配套的麻雀虽小但五脏俱全的示例程序,其经过浅墨

我的OpenCV学习笔记(17):利用形态学学滤波检测边沿和角点
首先如何理解对灰度图像进行形态学操作? 一种比较形象的方法是将灰度图像看做是“等高线”:亮的区域代表山峰,而暗的区域代表山谷,图像的边沿就对应于峭壁。如果腐蚀一幅图像,会导致山谷被扩展,而峭壁减少了。相反的,如果膨胀一幅图像,峭壁则会增加。但是这两种情况下,中间的部分(大片的谷底和高原)基本保持不变。 在上述理解的基础上,如果我们对图像的腐蚀和膨胀的结果做差,就能提取图像的边界:因为边界区域,

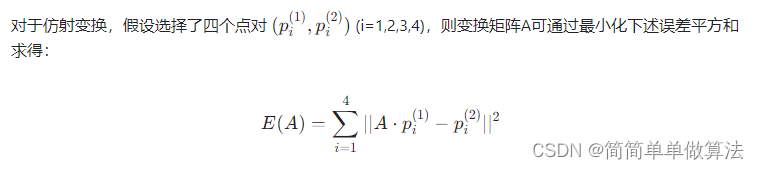
理解Harris角点检测的数学原理
Harris角点检测的数学原理 Harris角点检测基于图像的局部自相似性,它通过分析图像窗口在各个方向上移动时灰度变化的程度来识别角点,它通过计算每个像素点的Harris响应值来评估该点是否为角点。数学上,这种变化可以通过构建一个二次型函数来量化,该函数基于图像在x和y方向上的一阶导数(即图像的梯度),以及梯度的二次项的组合。 一、数学题目第一题 假设我们有一个图像区域的灰度函数 I (


SUSAN角点及边缘检测方法详解
SUSAN检测方法是一种基于窗口模板的检测方法,主要是通过在图像每个像素点位置处建立一个窗口,这个窗口是圆形的,这里为了得到各方向同性的响应,窗口内可以是常数权值或高斯权值,一般情况下,窗口半径为3.4个像素(即窗口内总有37个像素)。 这样的窗口模板被放置在每个像素的位置,确定点之间强度相似程度可以由下面的图来描述,这里的x轴是指像素点之间强度差别,y轴指的相似程度,为1就指完全相似。
目标检测之Harris角点特征
角点是图像的重要局部特征,可以简单的认为至少两个方向上图像灰度变化都比较大的点。 在实际的图像中,轮廓的拐角,线段的末端都是角点,角点特征信息量大,便于测量和表示,能够适应环境光照变化,在处理遮挡和几何变形问题时有显著优点。 在角点附近,图像的灰度梯度是不连续的,而且在角点临近区域,梯度有两个或者两个以上的不同值。 上段python 代码 #!/usr/bin/env pyth

相机标定后获取角点坐标
相机标定后获取角点坐标 matlab自带的Camera Calibrator只能对象图片进行标定,但是却不显示标定板各个角点的坐标。通过查找源码可以找到其获取坐标的函数。 即detectCheckerboardPoints() 函数 points = detectCheckerboardPoints(img); points即为角点坐标 clear;clc;img= imre
OpenCV学习之旅8——角点检测(2)
1. Shi-Tomasi角点检测 Shi-Tomasi算法是Harris算法的改进,Shi-Tomasi算法最早发布于文章《Good Feature to Track》中被提出来,因此OpenCV实现此算法的函数名为goodFeatureToTrack。 1.1 goodFeaturesToTrack()函数 void goodFeaturesToTrack( InputArray ima

OpenCV学习之旅8——角点检测(1)
1. Harris角点检测 计算机视觉中,兴趣点(interest points)也被称作关键点(key points)、特征点(feature points),他被用于物体识别、图像识别、图像匹配、视觉跟踪、三维重建等一系列问题。 我们不再观察整幅图像,而是选择某些特殊点进行观察。图像特征类型可分为三类:边缘、角点、斑点。 如果某一点在任何方向的微小运动都会造成灰度的剧烈变化,那么我们称这
MATLAB编程-Foerstner算子计算角点
1、程序结果 2、Foerstner算子原理 算子是通过计算各像素的Robert's梯度值和以像素为中心的一个窗口的灰度协方差矩阵 , 在图像中寻找具有尽可能小而接近圆的误差椭圆的点作为特征点 。 它能给 出特征点的类型且精度较高,所 实际中应用比较广泛. [+v matlab56 沟通技术问题] 3、程序 disp('Calling ip_fop ...');[win, c
FAST角点检测算法
FAST(Features from Accelerated Segment Test)角点检测算法是一种快速且高效的角点检测方法。它通过检测每个像素周围的连续像素集合,确定是否为角点。以下是 FAST 角点检测算法的基本流程: FAST 角点检测算法的基本过程主要包括以下几个步骤: 选择一个候选点p作为中心点,并设置一个合适的亮度阈值T。 在候选点的周围选择一个圆形区域,通常圆周上会选择
[G+smo]边界和角点
1. 确定多片模型中各个片的顺序 借助Paraview.打开Pipeline brower下方的information选项卡,可以看到Data Hierarchy中的multi-block dataset. 选定其中一个block, 可以查看其几何区域和边界的范围。由这个信息可以确定片的顺序。 打开gsview.pvd -> Properties Apply -> filters Alphab