本文主要是介绍[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System
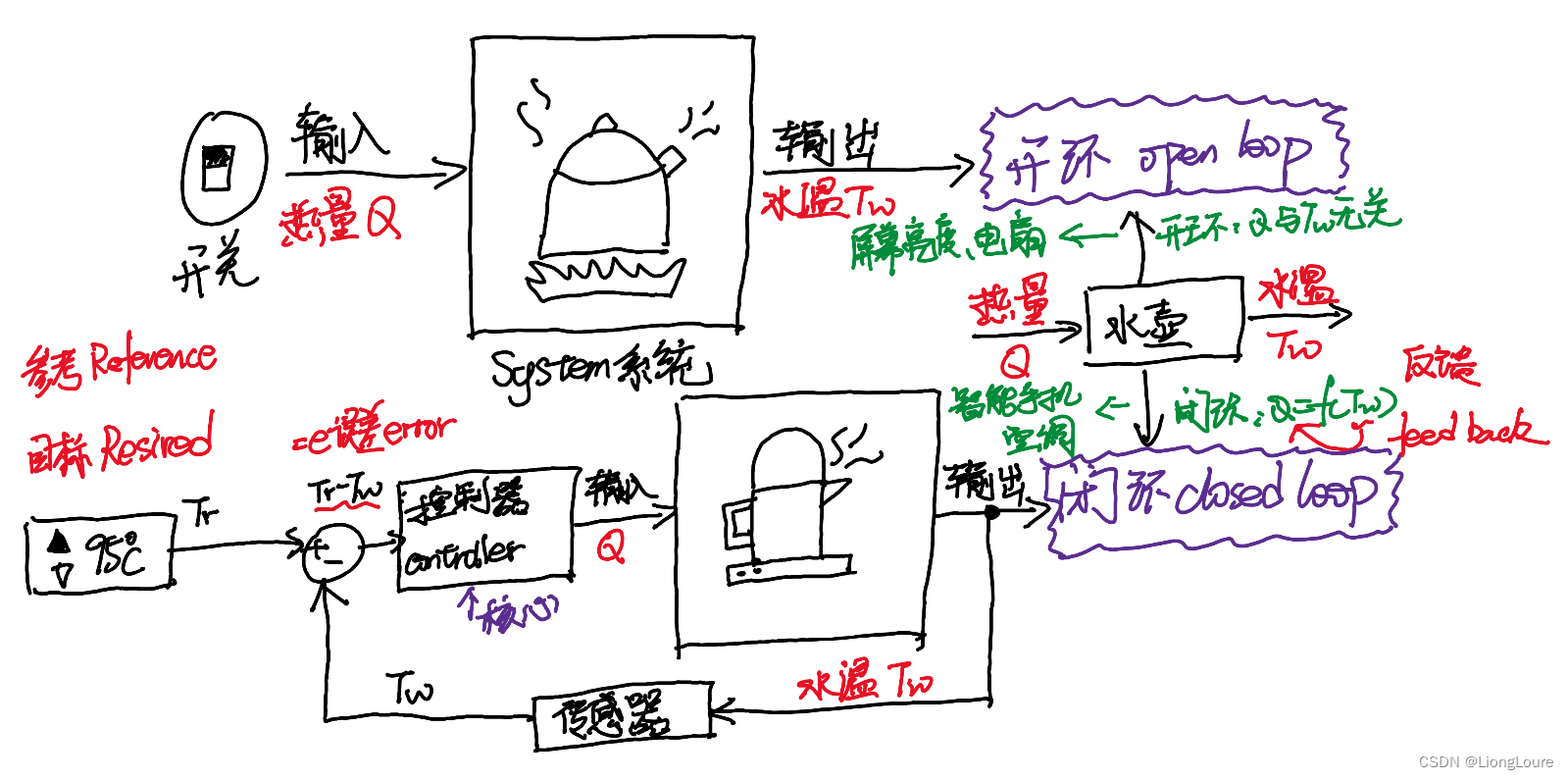
- EG1: 烧水与控温水壶
- EG2: 蓄水与最终水位
- 闭环控制系统
EG1: 烧水与控温水壶
EG2: 蓄水与最终水位

h ˙ = q i n A − g h A R \dot{h}=\frac{q_{in}}{A}-\frac{gh}{AR} h˙=Aqin−ARgh
设 A = 1 A=1 A=1. 目标: h = x → x d h=x\rightarrow x_d h=x→xd —— 保持液面高度
x d = C R g , C = x d g R = u , G ( s ) = 1 S + g R x_d=\frac{CR}{g},C=\frac{x_dg}{R}=u,G\left( s \right) =\frac{1}{S+\frac{g}{R}} xd=gCR,C=Rxdg=u,G(s)=S+Rg1
闭环控制系统
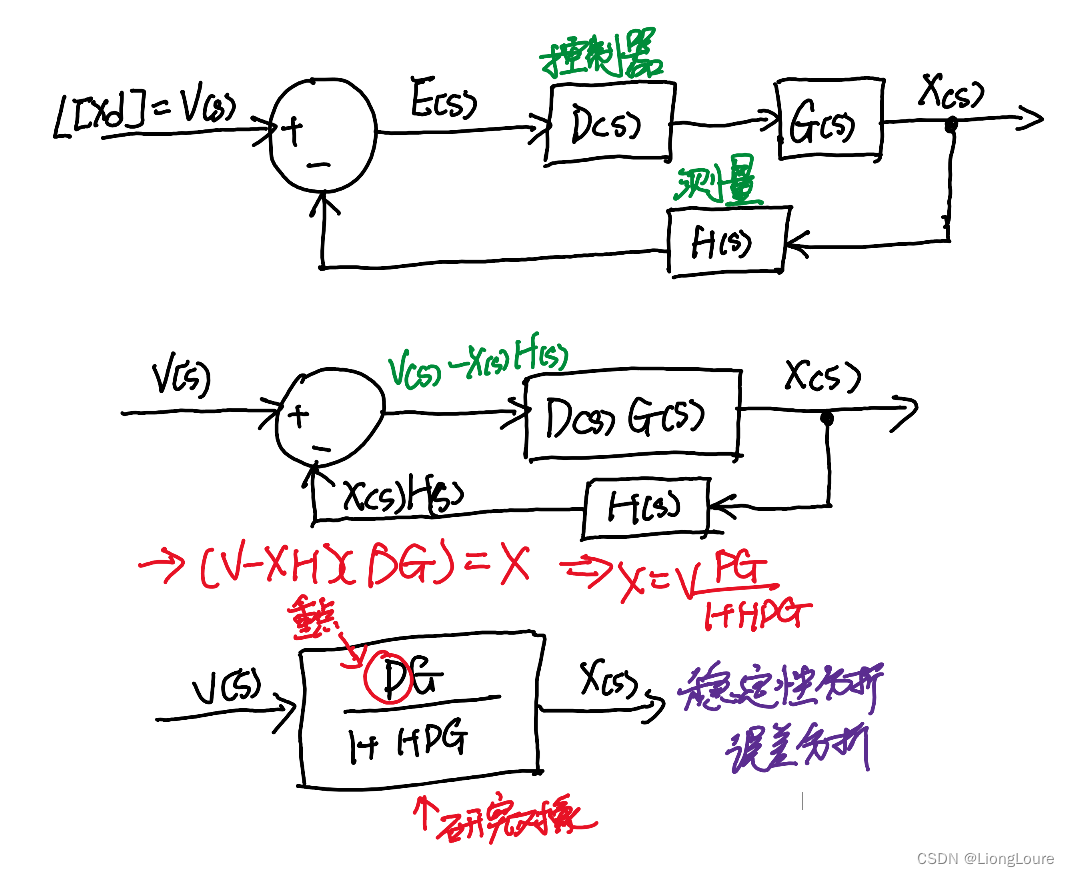
X = D G 1 + H D G V X=\frac{DG}{1+HDG}V X=1+HDGDGV
这篇关于[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






