开环专题
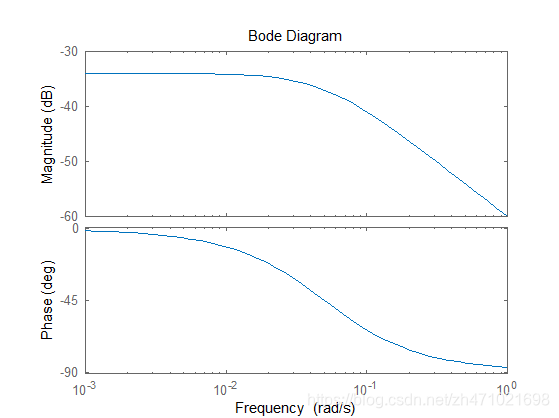
问题:设开环系统的频率特性为则其相频特性穿越-180°线时对应的频率为()。 #学习方法#微信
问题:设开环系统的频率特性为则其相频特性穿越-180°线时对应的频率为()。 ? A、10rad1s B、3rad/s C、lradIs D、√3rad/s 参考答案如图所示
LLC开关电源开发:第三节,LLC电路原理图及开环仿真
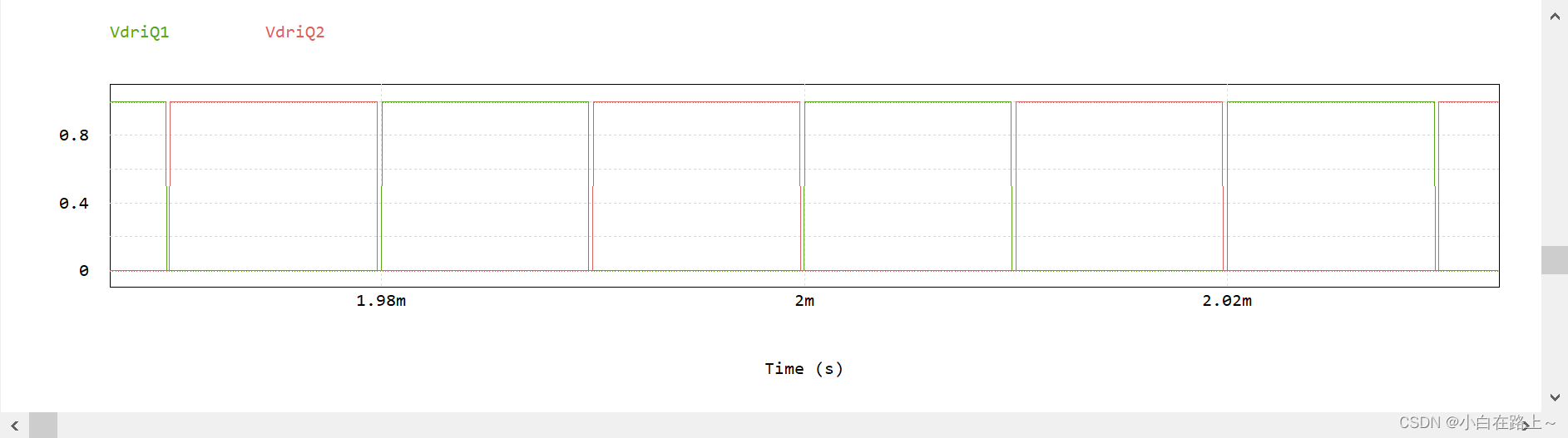
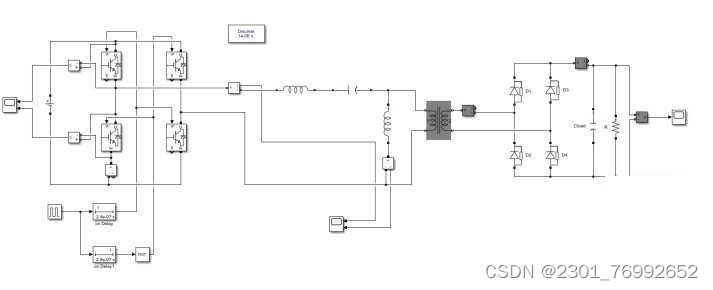
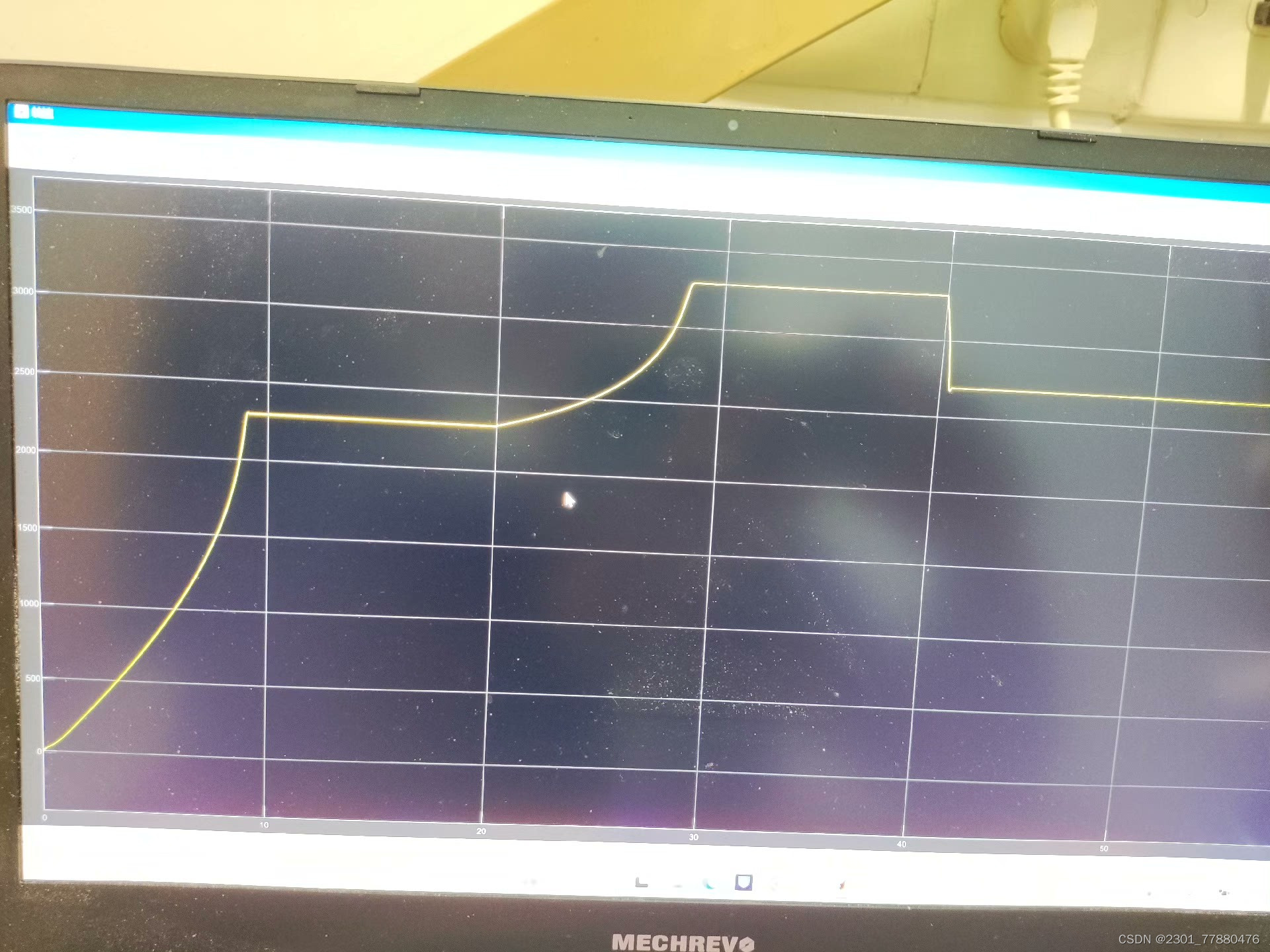
LLC开关电源开发:第三节,LLC电路原理图 第三节,LLC电路原理图文章目录 一、开发板指标二、原理图简介1.LLC主功率电路2.输入滤波电路3.烧录口及复位电路4.DSP供电电路5.输出采样电路6.DSP外围电路7.指示灯电路8.调压滑动变阻器电路9.隔离驱动电路10.辅助电源电路 三、LLC开环仿真1.仿真电路2.驱动波形 说明 一、开发板指标 开发板说明: ➢ 输入

恒压频比开环控制系统Matlab/Simulink仿真分析(SVPWM控制方式)
一、SVPWM 交流电机需要输入三相正弦电流的最终目的就是在电机空间形成圆形磁场,从而产生恒定的电磁转矩。把逆变器和交流电机视为一个整体,以圆形旋转磁场为目标来控制逆变器的工作,这种控制方法称为“磁链跟踪控制”,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的,所以又称为“电压空间矢量PWM控制”,即SVPWM。 与SPWM控制相比,SVPWM有更高的电压利用率,其输出电压最高可提高1

恒压频比开环控制系统Matlab/Simulink仿真分析(SPWM控制方式)
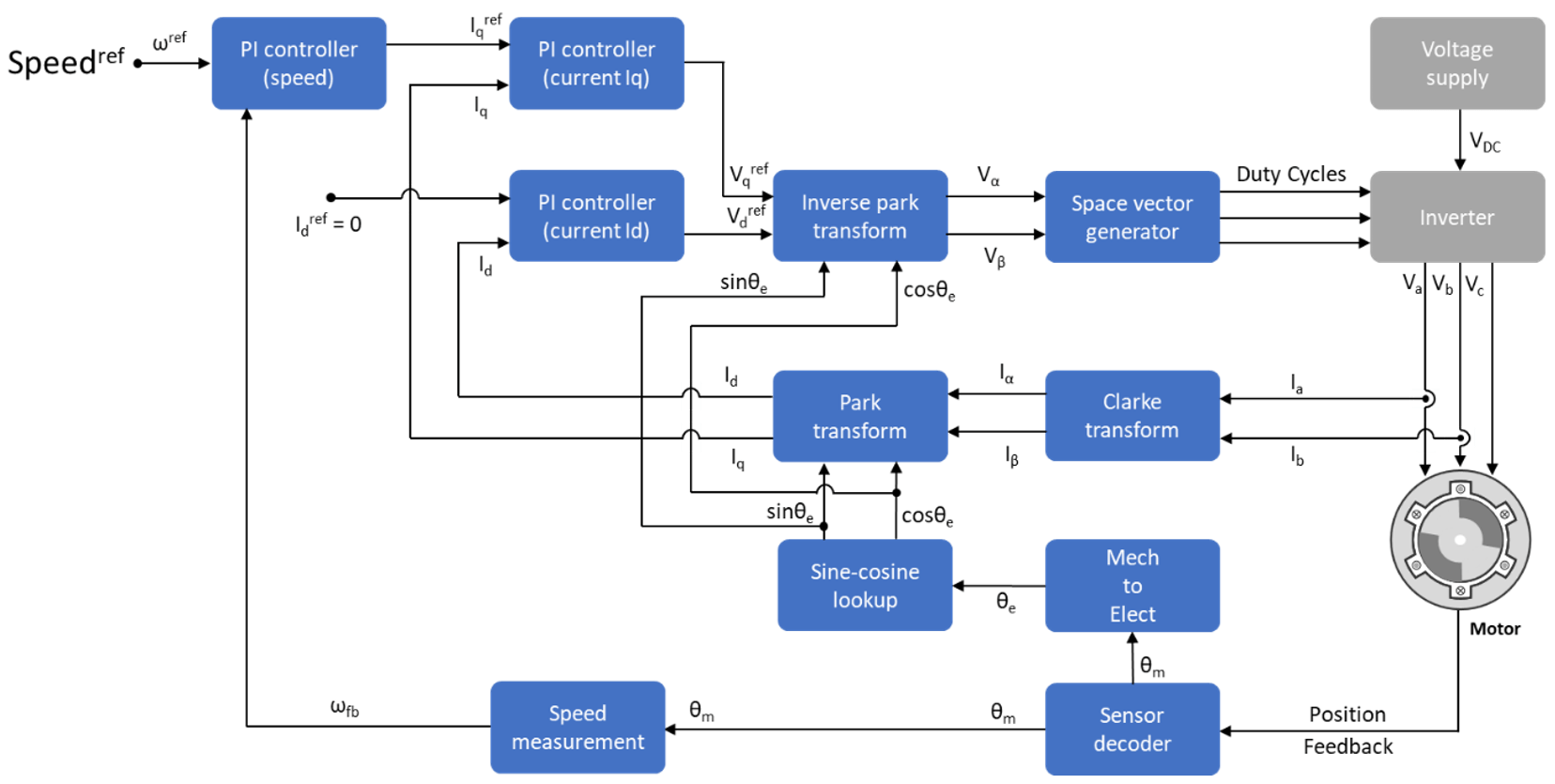
介绍恒压频比的开环控制方法驱动永磁同步电机的转动,首先分析恒压频比的控制原理,然后在Matlab/Simulink中进行永磁同步电机恒压频比开环控制系统的仿真分析,最后将Simulink中的恒压频比控制算法生成代码加载到实际工程中进行工程实现。 一、 恒压频比(V/F)控制原理 变频调速系统一般要求在变频时保持电机气隙磁通为最大值免不变,这样可以在允许的电流下获得最大转矩,使电机具有良好的调速
基于开源项目ESP32 SVPWM驱动无刷电机开环速度测试
基于开源项目ESP32 SVPWM驱动无刷电机开环速度测试 ✨本篇硬件电路和代码来源于此开源项目:https://github.com/MengYang-x/STM3F401-FOC/tree/main📍硬件电路和项目介绍,立创开源广场:https://oshwhub.com/shadow27/tai-yang-neng-wu-ren-chuan🥕相关篇《基于开源项目HAL STM


运放的开环增益和相移
如何判断一个运放单位增益是否稳定,设计反馈电路时不会发生自激振荡呢? 1、首先明确几个概念 Aod——开环增益;Aol——闭环增益; 安全裕量,-180°相移时的增益必须低于3dB,或者0dB增益时的相移必须超过-135°(比如:-125°,朝上就行) ——3dB,放大倍数大约是1.4; ——6dB,放大倍数大约是2; ——9dB,放大倍数大约是2.8; ——12dB,放大倍数大约是
开环端到端自动驾驶: 到底行不行
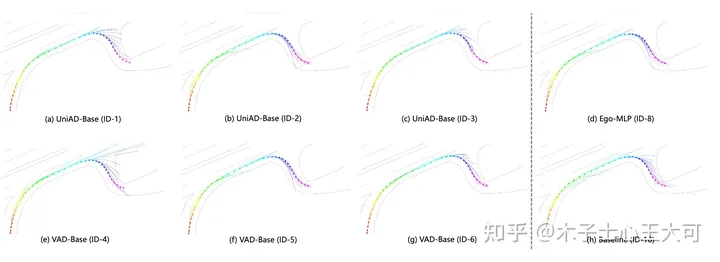
开环端到端自动驾驶: 到底行不行 附赠全面专业的自动驾驶学习资料:直达链接 TLDR: 别在nuScenes上做开环端到端自动驾驶刷点了。 论文: https://arxiv.org/pdf/2312.03031.pdf github: https://github.com/NVlabs/BEV-Planner 前言 UniAD[1]获得CVPR Best Paper Award后毫无

51-29 英伟达最新,CVPR 2024 | 自车状态是开环端到端自动驾驶所需要的一切吗?
本论文来自NVIDA和南京大学的工作。蛮幸运的,该论文提出了很多思考,证明了很多最优paper在落地上车方面的无效性。咱们对待新方法能否成为自动驾驶的最佳实践要审慎。 论文名称:Is Ego Status All You Need for Open-Loop End-to-End Autonomous Driving? 论文链接:https://arxiv.org/abs/2312.03031

自研的EtherCAT总线一拖四开环步进驱动器低成本方案
自研的EtherCAT总线一拖四开环步进驱动器,可以连接TwinCAT 欧姆龙 汇川PLC Codesys SOEM主站,IGH主站。 电机单轴驱动电流最大4A,可以带42/57/86电机。带12路数字输入,8路数字输出。 EtherCAT总线DC同步周期125us,支持多组动态PDO,支持动态对象字典配置,支持ID站号设置保存,支持CSP CSV 回零模式。 低成本EtherCAT总线驱动器方案
控制教程 —— 巡航控制篇:1.系统建模及开环响应分析
目录 物理模型建立系统动力方程式系统参数配置状态空间模型传递函数模型控制指标设计开环阶跃响应开环极点/零点开环伯德图 物理模型建立 在现代车辆的反馈控制系统中,自动巡航控制一个典型的例子。巡航控制系统的目的是在不受外界干扰(如风或坡度变化)的情况下保持恒定的车速。可以通过测量测速,将其与期望速度或参考速度进行比较,并根据控制规律自动调节油门来实现。 这里我们考虑一个简单的车辆
电机的开环控制和闭环控制
目录 开环电机控制 闭环电机控制 开环到闭环转换 开环电机控制 开环控制(也称为标量控制或伏特/赫兹控制)是一种常见的电机控制方法,可用于运行任何交流电机。这是一种简单的方法,不需要来自电机的任何反馈。为了保持定子磁通恒定,我们需要保持电源电压振幅与其频率成比例。 上图显示的是一个开环控制系统。电源电路包含一个由直流电源供电的 PWM 电压馈电逆
![[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System](https://img-blog.csdnimg.cn/direct/c8b811d78b0c43c7be47bd44f76ded14.png)
[足式机器人]Part2 Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System
本文仅供学习使用 本文参考: B站:DR_CAN Dr. CAN学习笔记-自动控制原理Ch1-1开环系统与闭环系统Open/Closed Loop System EG1: 烧水与控温水壶EG2: 蓄水与最终水位闭环控制系统 EG1: 烧水与控温水壶 EG2: 蓄水与最终水位 h ˙ = q i n A − g h A R \dot{h}=\frac{q_{

安科瑞开口式开环霍尔电流传感器,电流测量范围宽精度高,过载能力强,线性好,抗干扰能力强等优点。
1、概述 霍尔电流传感器主要适用于交流、直流、脉冲等复杂信号的隔离转换,通过霍尔效应原理使变换后的信号能够直接被AD、DSP、PLC、二次仪表等各种采集装置直接采集,广泛应用于电流监控及电池应用、逆变电源及太阳能电源管理系统、直流屏及直流马达驱动、电镀、焊接应用、变频器,UPS伺服控制等系统电流信号采集和反馈控制,具有响应时间快,电流测量范围宽精度高,过载能力强,线性好,抗干扰能力强等优点。
matlab表示开环传函,自控实验四 一、二阶系统频率特性测试与分析 - GXUZF.COM - 林澈思的茶...
广西大学电气工程学院 《自动控制理论》实验报告 成绩 教师签字 学生姓名 赵帆 学号 17021***** 专业班级 电自171班 20 年 月 日 实验四 一、二阶系统频率特性测试与分析 实验原理: 1、系统的频率特性测试方法 对于线性定常系统,当输入端加入一正弦信号时,其稳态输出是一个与输入信号频率相同,但幅值和相位都不同的正弦信号。 幅频特性:,即输出与输入信号的幅度比值,通常转换成形式。

自动控制原理5.2:典型环节与开环系统的频率特性
参考书籍:《自动控制原理》(第七版).胡寿松主编. 《自动控制原理PDF版下载》 2.典型环节与开环系统的频率特性 2.1 典型环节 典型环节分为:最小相位环节、非最小相位环节; 最小相位环节: 比例环节: K , ( K > 0 ) K,(K>0) K,(K>0);惯性环节: 1 / ( T s + 1 ) , ( T > 0 ) 1/(Ts+1),(T>0) 1/(Ts+1)
MATLAB全桥或者半桥LLC谐振DC DC变换器仿真 内含开环仿真、电压闭环仿真等三个仿真文件
MATLAB全桥或者半桥LLC谐振DC DC变换器仿真 内含开环仿真、电压闭环仿真等三个仿真文件 并含有电路参数仿真计算过程 三个仿真一个报告 ID:3962699250489369
转速开环恒压频比控制的交流异步电动机调速系统仿真Matlab simulink
转速开环恒压频比控制的交流异步电动机调速系统仿真Matlab simulink vvvf转速开环恒压频比控制的交流异步电动机调速系统仿真 v-f转速开环恒压频比控制的交流异步电动机调速系统仿真 异步电机转速闭环转差频率控制变压变频交流调速仿真,有svpwm控制 转速恒压频比交流变频调速系统Simulink仿真,可观察到电压频率的变比情况以及电动机的转速波形。 配有精美的报告说明。 ID:73

STM32CubeIDE自平衡小车教程5.直流电机转速开环控制
1.打开上一节的文件,进入我们上一小节修改过的文件夹,找到并打开.cproject 文件,双击.ioc 文件,双击打开工程。 2.在左侧 Pinout&Configuration 界面中的 Timers 下拉中点击TIM2,然后在TIM2 的 Mode and Configuration 的 Mode中将Channel3 选择为 PWM Generation CH3;将Channel4 选择为
开环模块化多电平换流器仿真(MMC)N=6(Simulink仿真)
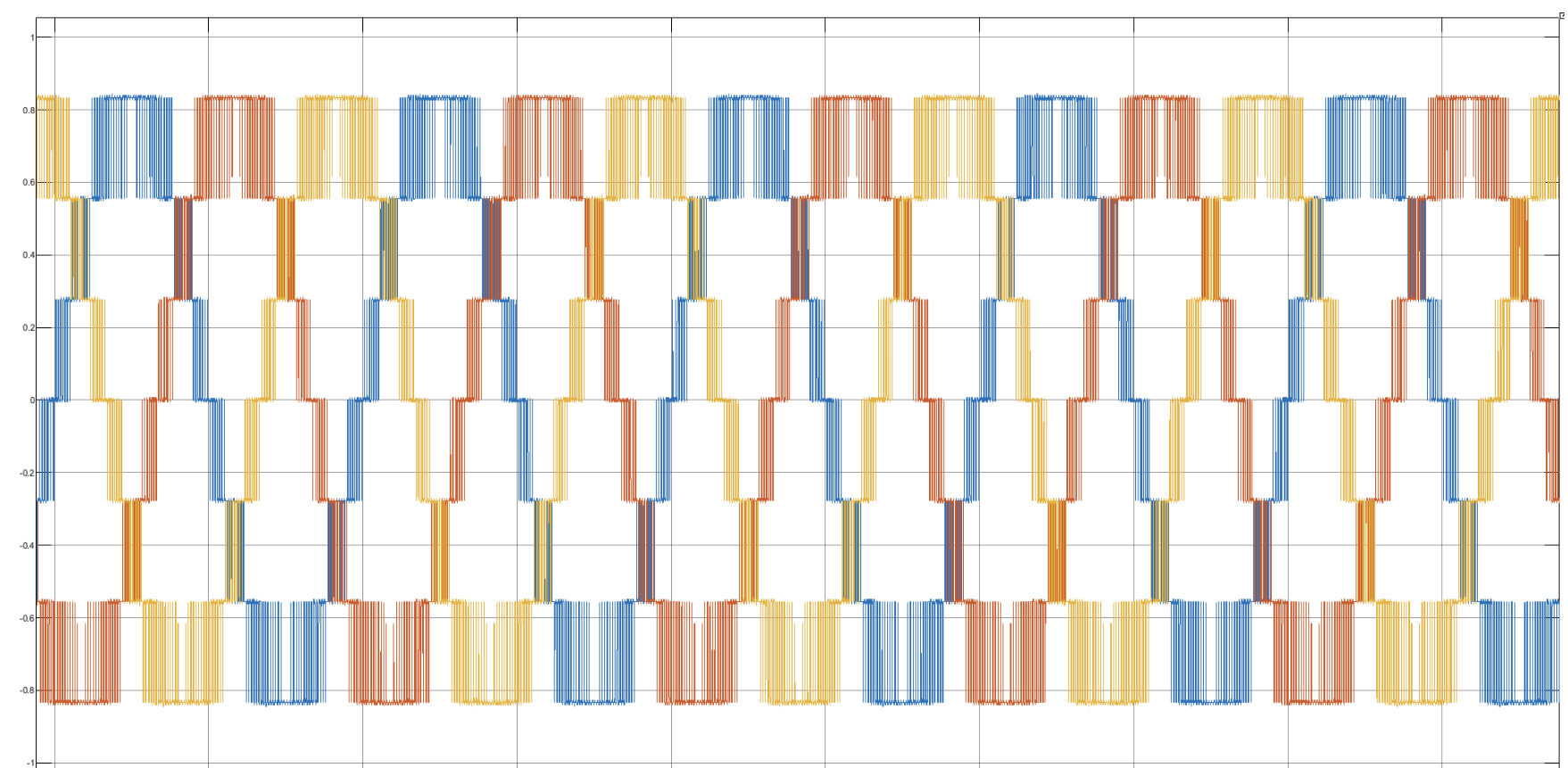
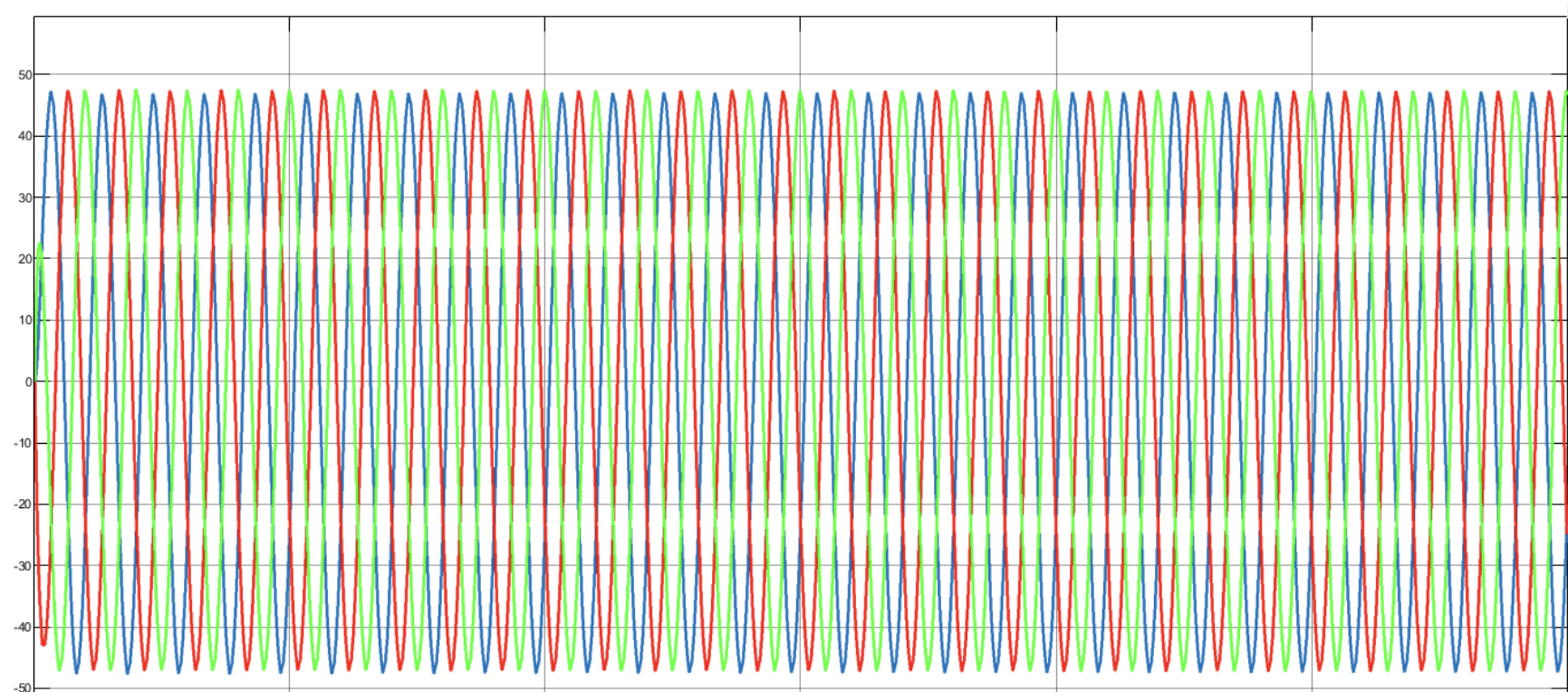
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 2.1 整体模型 2.2 三相电压输出波形 2.3 三相电流输出波形 🎉3 参考文献 🌈4 Simulink仿真实现 💥1 概

GD32 调试FOC开环控制时,角度自增电机能转,用编码器反馈角度电机不转情况
在调试FOC开环控制时,完成了反park变换和SVPWM波模块代码编写,模块输出只需要速度和角度值,所以用恒定速度值(正值)和角度自增的办法测试FOC模块,电机可以运转,说明模块代码没有问题。 但是加上编码器反馈角度后,发现电机不能运转(速度仍然给的是正值)。 经检查发现,没加编码器之前,速度给正值、编码器自增的电机运转方向是逆时针。 加了编码器之后,手动逆时针旋转电机,编码器的值递减。
【OpenAI】Python:基于 Gym-CarRacing 的自动驾驶项目(4) | 车辆控制功能的实现 | 开环控制 | 闭环控制 | 启停式控制 | PID 控制 | Stanley 控制器
猛戳!跟哥们一起玩蛇啊 👉 《一起玩蛇》🐍 💭 写在前面:本篇是关于多伦多大学自动驾驶专业项目的博客。GYM-Box2D CarRacing 是一种在 OpenAI Gym 平台上开发和比较强化学习算法的模拟环境。它是流行的 Box2D 物理引擎的一个版本,经过修改以支持模拟汽车在赛道上行驶的物理过程。模块化组件 (Modular Pipeline) 分为 低层次感知与场景解析
基于最近电平逼近的开环MMC逆变器Simulink仿真模型
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 2.1 整体模型 2.2 输出电压波形 2.3 输出电流波形 🎉3 参考文献 🌈4 Simulink仿真实现 💥1 概述 基于
基于最近电平逼近的开环MMC逆变器Simulink仿真模型
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭:行百里者,半于九十。 📋📋📋本文目录如下:🎁🎁🎁 目录 💥1 概述 📚2 运行结果 2.1 整体模型 2.2 输出电压波形 2.3 输出电流波形 🎉3 参考文献 🌈4 Simulink仿真实现 💥1 概述 基于