本文主要是介绍基于APM(PIX)飞控和missionplanner制作遥控无人车-从零搭建自主pix无人车无人履带车坦克-2(以乐迪crossflight飞控为例),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
这里重点以乐迪crossflight飞控为例进行组装调试。
1.刷写固件

安装最新版的乐迪地面站,在官网可以下载。由于产品里面不好找到对应的飞控,可以在首页滑动图片里进入。

1.连接飞控和电脑,查看com口,安装驱动。
2.刷写固件。如果在线更新失败,尝试从官网下载固件apj格式文件。
3.在地面站选择本地文件。

4.插拔重启。
2.连接地面站

转动飞控,如果水平仪变化说明识别成功。
1.加速度计校准。
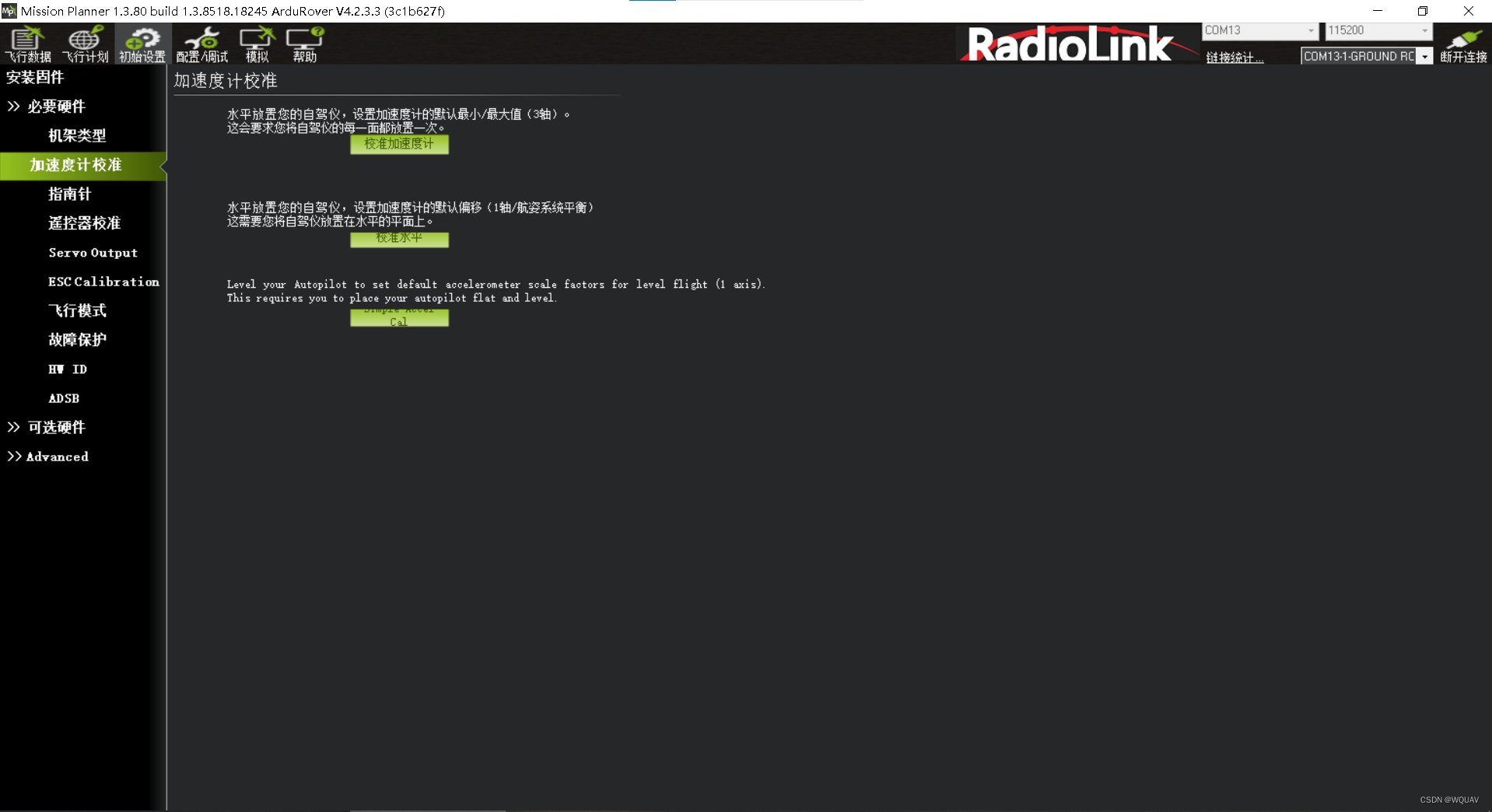
按照提示将六个方位逐一进行校对。
一直到提示校准成功。
2.校准遥控器。最好使用乐迪系列。以下为使用at9s作为示例。
长按mode,进入机型选择,里面有多旋翼、汽车模型等,根据需要进行选择并保存,退出再次进入进行核对。
长按mode,进入舵机相位,把油门设置为反向。
进入地面站进行遥控器校准,如果没有进度条显示,可能为接收机上没有按模式按钮,需要调整为s.b模式时,接收机应显示紫红色led灯,如果初始为红色需要进行调整。
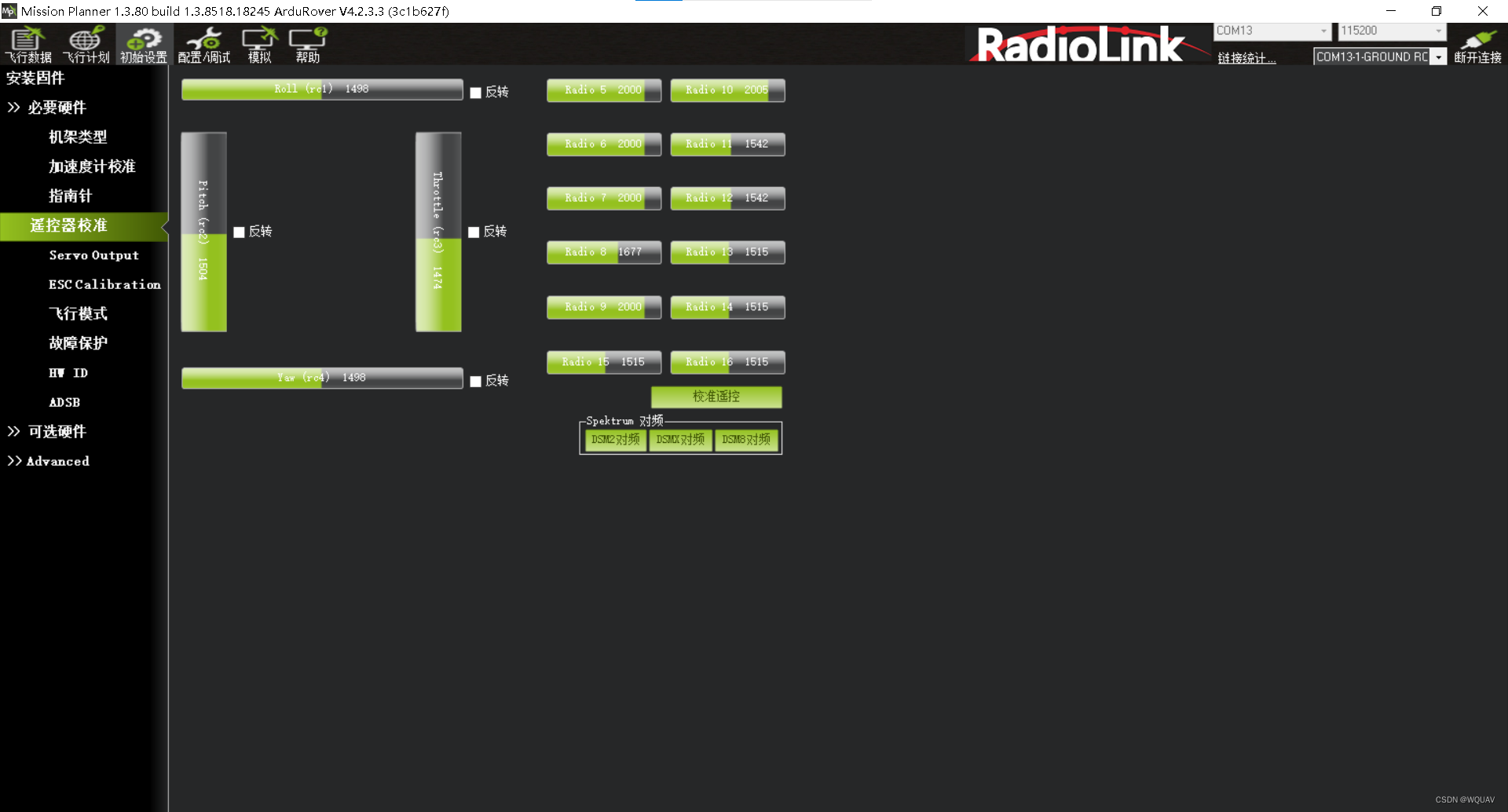
进行最大量所有通道校准。

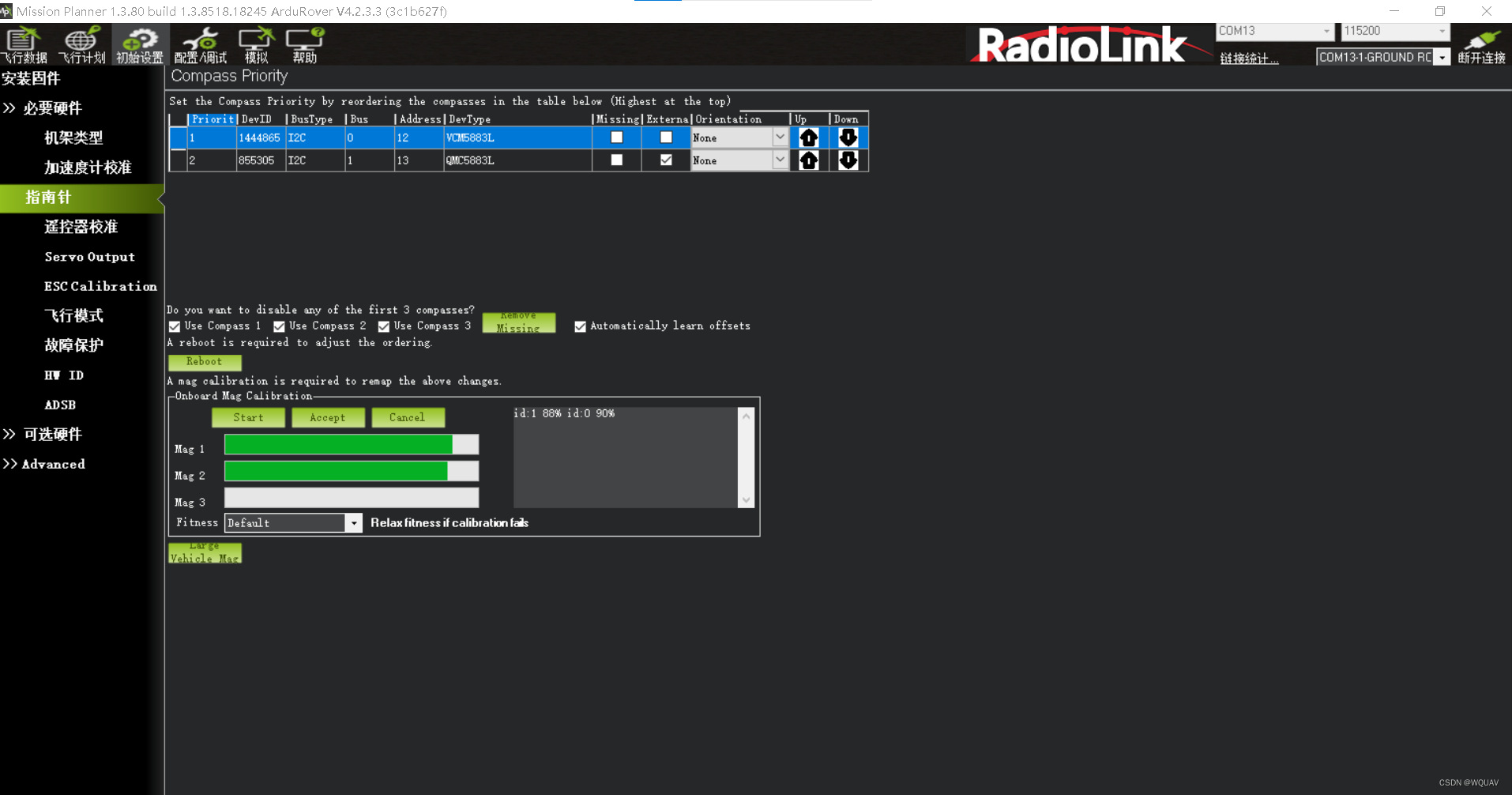
校准GPS
3.设置模式

将模式1设置为hold模式。
其余为手动或其他。
上图显示通道为8,在遥控器上为旋钮开关,为方便操作,可以调整到五通道。
可以直接在遥控器基础菜单-辅助通道-八通设为swc。高级菜单-姿态选择-通道:ch5 三段:swc 二段swd。
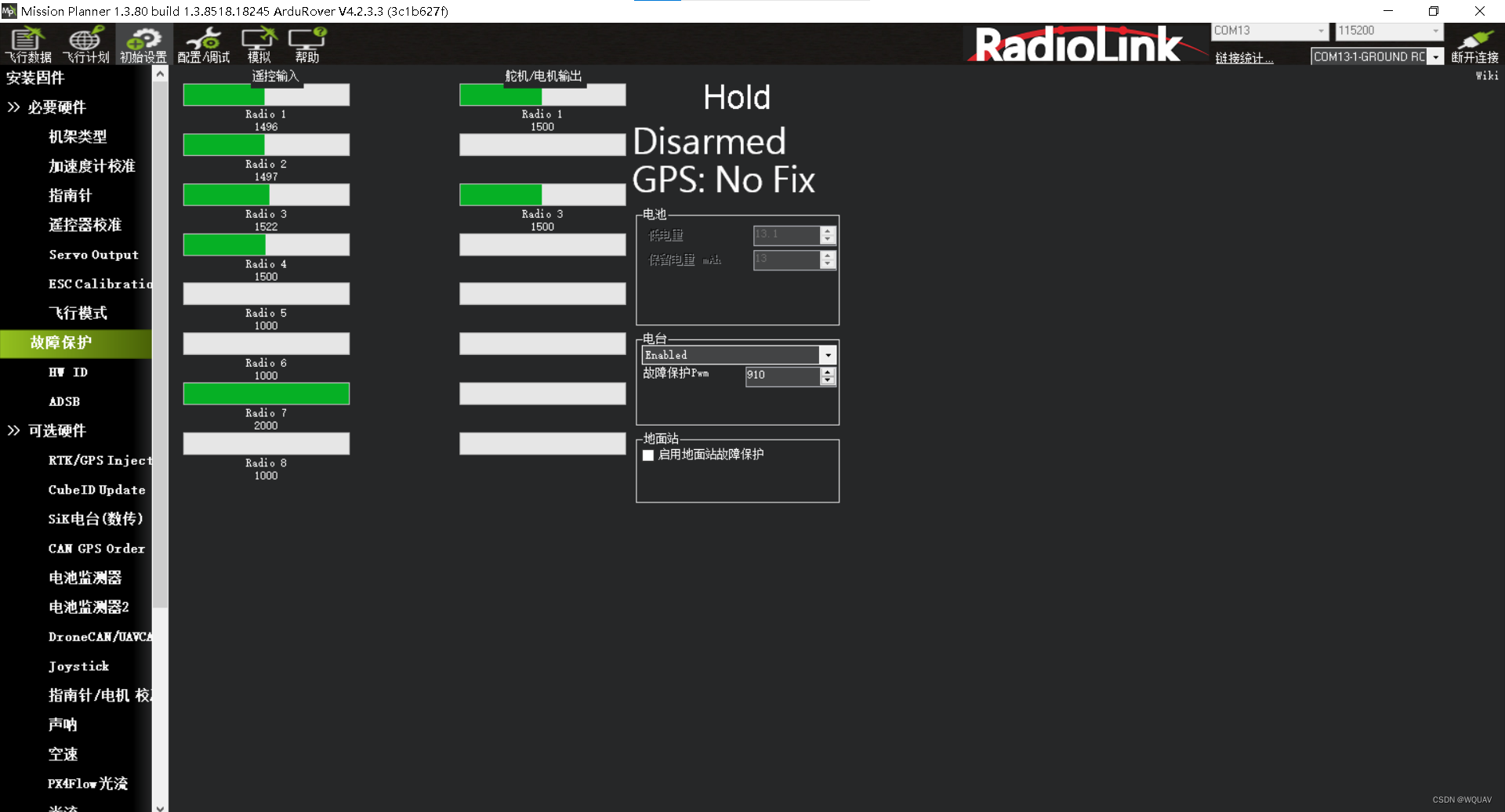
4.失控保护、故障保护
这篇关于基于APM(PIX)飞控和missionplanner制作遥控无人车-从零搭建自主pix无人车无人履带车坦克-2(以乐迪crossflight飞控为例)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









