履带专题
智能网联汽车实训教学“好帮手”——渡众机器人自动驾驶履带车
智能网联汽车实训教学“好帮手”——渡众机器人自动驾驶履带车 人工智能技术的兴起,为传统汽车行业注入了强有力的变革基因,以AI技术为驱动的无人驾驶成为汽车产业的未来,同样也面临诸多机遇和挑战。 一方面智能网联汽车的发展,为多产业的联动与协同创造了发展条件;另一方面,无人驾驶领域市场发展速度远远大于高校人才培养速度,如何适应智能网联无人驾驶技术的快速发展,培养出符合产业发展的技术人才,成为
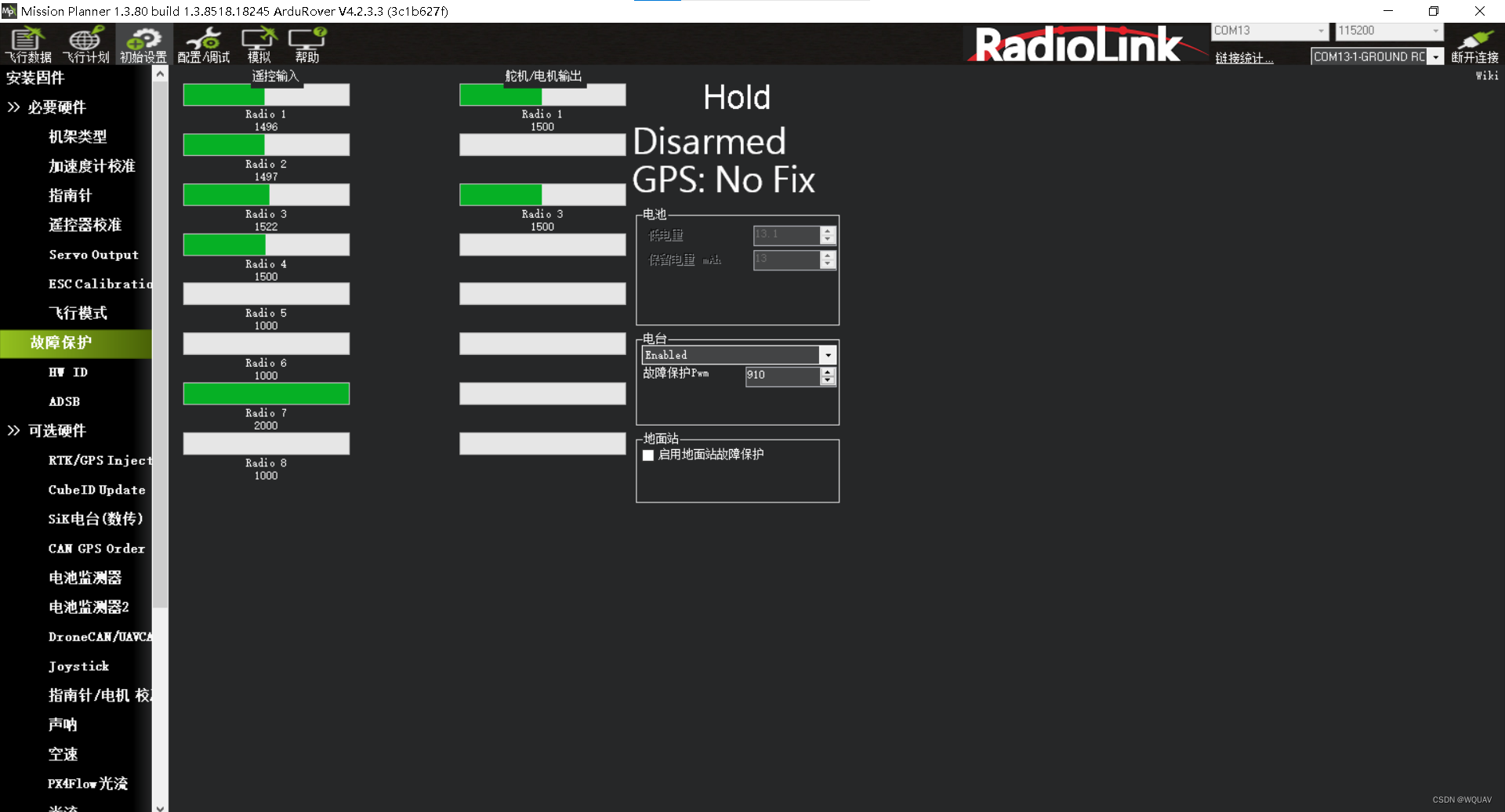
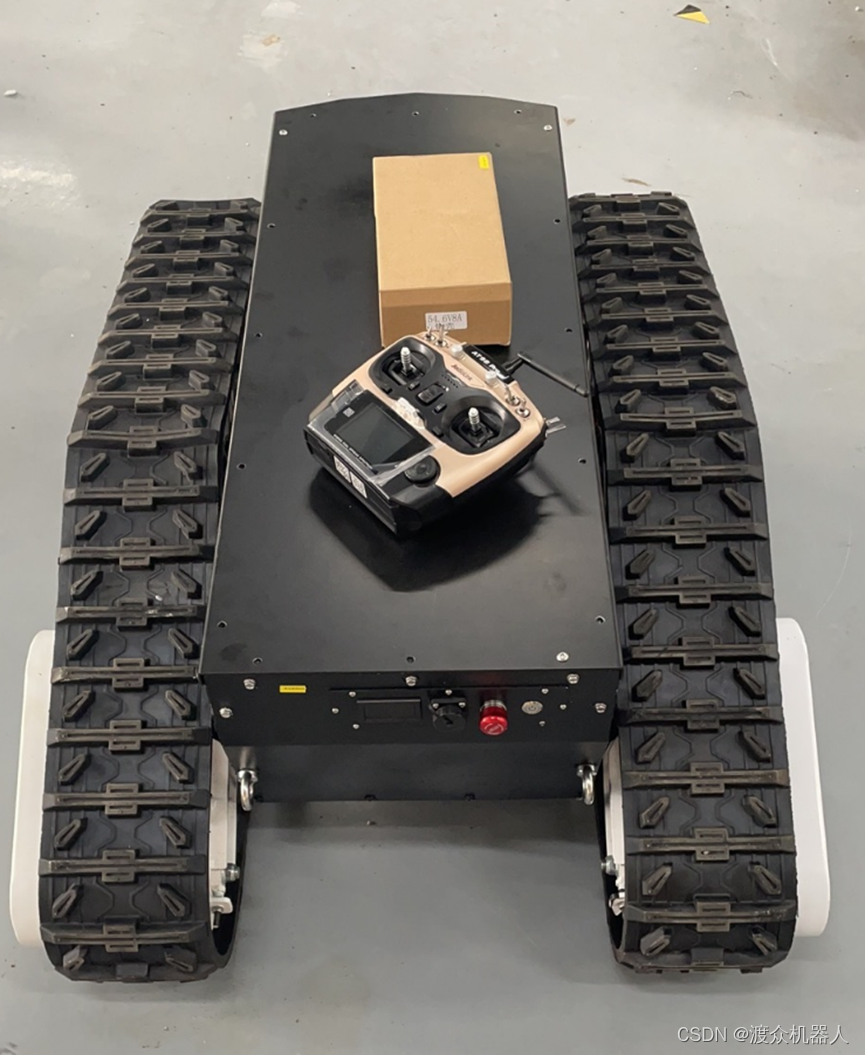
基于APM(PIX)飞控和missionplanner制作遥控无人车-从零搭建自主pix无人车无人履带车坦克-2(以乐迪crossflight飞控为例)
这里重点以乐迪crossflight飞控为例进行组装调试。 1.刷写固件 安装最新版的乐迪地面站,在官网可以下载。由于产品里面不好找到对应的飞控,可以在首页滑动图片里进入。 1.连接飞控和电脑,查看com口,安装驱动。 2.刷写固件。如果在线更新失败,尝试从官网下载固件apj格式文件。 3.在地面站选择本地文件。 4.插拔重启。 2.连接地面站 转动飞控,如果水平仪