本文主要是介绍智能网联汽车实训教学“好帮手”——渡众机器人自动驾驶履带车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
智能网联汽车实训教学“好帮手”——渡众机器人自动驾驶履带车

人工智能技术的兴起,为传统汽车行业注入了强有力的变革基因,以AI技术为驱动的无人驾驶成为汽车产业的未来,同样也面临诸多机遇和挑战。
一方面智能网联汽车的发展,为多产业的联动与协同创造了发展条件;另一方面,无人驾驶领域市场发展速度远远大于高校人才培养速度,如何适应智能网联无人驾驶技术的快速发展,培养出符合产业发展的技术人才,成为全行业面临的重要挑战。
智能驾驶是人工智能技术的集大成者,也是有挑战的领域。在产业高速发展的背后,是大量优秀人才的需求。AI的高科技属性决定了它具有不低的学历门槛。更复杂的是,智能驾驶属于典型的多学科交叉领域,涉及到电子、计算机、通信、汽车与交通等多方面知识。
发展智能驾驶教学需要与之匹配的课程体系,对于中国大力建设人工智能学科的高校来说,除了交叉性师资、教材缺乏之外,非常重要的学科发展掣肘就是教学实验室等软硬件配套设施未跟上,无法满足教学、教研要求。

北京渡众机器人科技有限公司的自动驾驶教学履带车能将自动驾驶技术输出到教学科研领域,尽量降低进入智驾领域的门槛。
一、自动驾驶教学履带车的组成
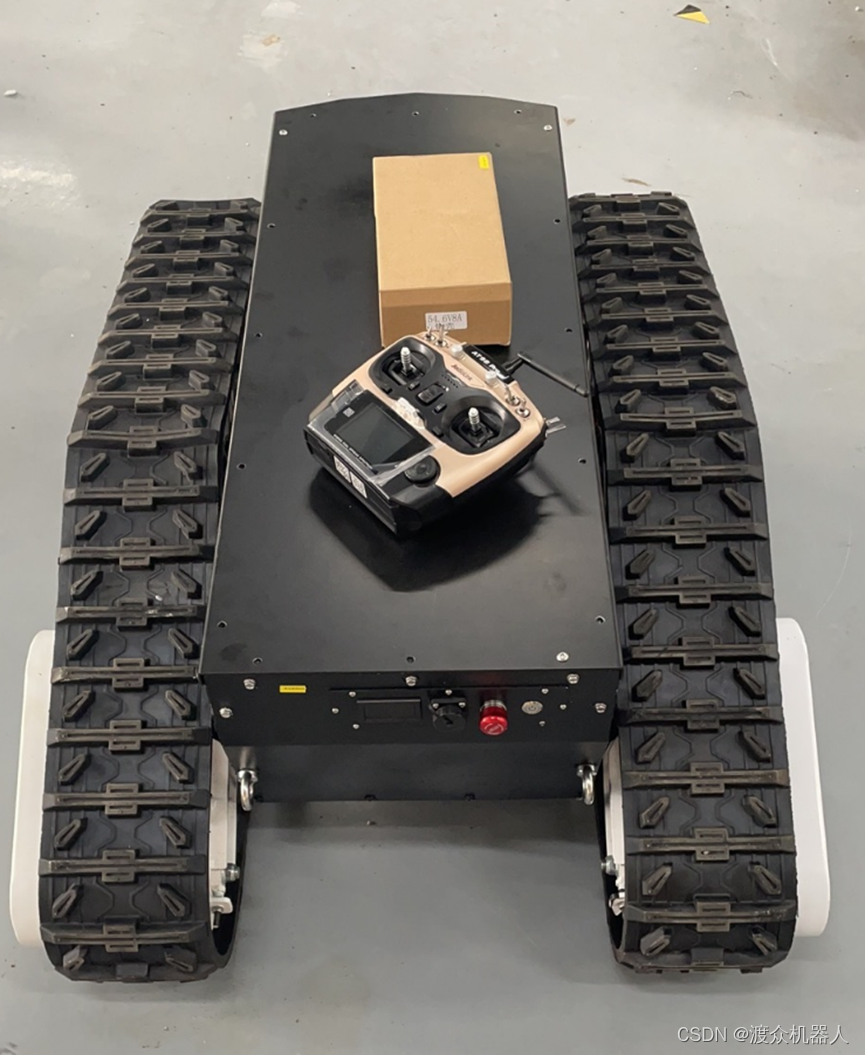
1.1线控履带车底盘
自动驾驶履带车的底盘是其关键组成部分之一,它决定了车辆在不同地形下的机动性、稳定性和适应性。
履带是由很多块履带板通过销子连接起来的,形成的一个履带链环,通过马达带动驱动轮转动,驱动轮上的齿轮与履带之间相互咬合而带动履带,在多个拖带轮的支撑下连续转动。
履带系统相比传统的轮胎系统更适合在不同类型地形上行驶,它提供更大的接地面积,提高行驶的平稳性和稳定性。

1.2自动驾驶系统模块
自动驾驶系统模块包含:
- 自动驾驶控制器 、
- 组合导航控制器、
- 车载摄像头、
- 16 线混合固态激光雷达、
- IMU、
- 工业路由器、
- GNSS 天线、
- 遥控器 、
- 重载两轴云台等。
北京渡众机器人公司的自动驾驶履带车支持在园区进行高精地图建模、路径规划、自动择路等功能定制。师生们能够基于高精地图自由选择起始点,该车会自动按照规划路线进行行驶;也可通过工业遥控器对履带车进行远程操控。学生能够通过理论和实践相结合的形式掌握自动驾驶技术。
1.3自动驾驶相关教学内容和实验课程
北京渡众机器人公司的自动驾驶履带车涵盖了广泛的教学内容:
1. 传感器技术:
- 激光雷达(LiDAR)原理和应用
- 摄像头及图像处理技术
- 雷达和超声波传感器
2. 数据处理与感知:
- 传感器数据融合
- 环境感知和障碍物检测
- SLAM(Simultaneous Localization and Mapping)技术
3. 决策与规划:
- 轨迹规划与路径规划
- 实时决策算法
- 交通法规与行为建模
4. 控制系统:
- PID控制器和其它控制算法
- 车辆动力学建模
- 实时控制与执行
5. 软件开发与集成:
- ROS(Robot Operating System)的使用
- 算法开发与仿真
- 硬件与软件的集成与调试
6. 安全性与伦理:
- 自动驾驶系统的安全性考量
- 伦理与法律问题
- 人机交互与用户体验
北京渡众机器人公司的自动驾驶履带车涵盖了多种实验课程:
1. 传感器与数据处理实验:
- 使用LiDAR进行障碍物检测
- 使用摄像头进行视觉识别与分析
- 数据融合与环境感知实验
2. 决策与规划实验:
- 路径规划算法的实现与测试
- 智能交通信号灯控制
- 基于状态机的行为决策
3. 控制系统与执行实验:
- 车辆动力学建模与控制
- 实时PID控制器调试
- 模拟与实际车辆的实时控制
4. 软件开发与集成实验:
- 使用ROS进行模块化开发
- 算法在仿真环境与实际硬件上的移植与测试
- 硬件驱动程序与接口开发
5. 综合实验与项目:
- 自主驾驶车辆的综合项目
- 基于真实场景的仿真实验
- 车辆性能与安全性的综合测试与评估
这些内容和实验课程涵盖了从传感器技术到决策与规划、控制系统、软件开发与集成,以及安全性与伦理等多个方面,使学生能够全面了解和掌握自动驾驶技术的各个层面。
1.4自动驾驶相关算法原理

1. 高精地图构建与定位
自动驾驶履带机器人通过激光雷达、RTK(实时动态差分定位系统)和IMU(惯性测量单元)协同工作,构建高精度地图并实现精准定位。激光雷达提供实时的环境点云数据,RTK提供厘米级精度的地理位置,IMU补偿短时间内的运动误差。机器人采用SLAM(同步定位与地图构建)算法,将实时点云数据与已有地图进行匹配,构建并更新高精度环境地图,确保在复杂环境中的精准定位。这一过程利用扩展卡尔曼滤波器(EKF)或粒子滤波器(PF)来融合多传感器数据,实现对机器人的精确位置和姿态的估计。

2. 动态避障与路径规划
履带机器人在行驶过程中,需要实时避开静态和动态障碍物,确保安全行驶。为此,机器人采用基于激光雷达和摄像头的动态避障算法。激光雷达提供环境中的障碍物位置和形状信息,摄像头辅助识别移动物体。机器人使用VFH(向量场直方图)或DWA(动态窗口方法)等局部路径规划算法,在实时计算安全行驶路径的同时,动态调整行驶方向和速度。全局路径规划则采用A*或Dijkstra算法,根据预先构建的高精地图计算出从起点到终点的最优路径。这两者相结合,确保了机器人在复杂环境中的高效、安全行驶。

3. 图像识别与智能跟踪
为了实现智能跟踪和目标识别功能,履带机器人配备了高性能的摄像头,并采用深度学习算法进行图像处理。通过卷积神经网络(CNN),机器人能够准确识别和分类摄像头捕获的图像数据,实现对道路标志、障碍物和目标物体的检测与识别。目标跟踪采用卡尔曼滤波器或粒子滤波器,通过连续的图像帧跟踪目标位置和运动轨迹。同时,深度学习模型如YOLO(You Only Look Once)或SSD(Single Shot MultiBox Detector)等,可实时检测并跟踪目标物体。结合路径规划算法,机器人能够智能调整行驶路线,保持对目标的持续跟踪,并在必要时进行避障或调整速度,以适应动态变化的环境。

二、教学帮手——单车智能的自动驾驶履带车
有人说,未来是人工智能的时代。从上世纪90年代计算机开始出现在人们的生活中,到如今人工智能的发展,科技已经改变了生活中很多东西。展望未来20年,世界可能会发生翻天覆地的变化。比如说自动驾驶,可能在未来20年,路上的汽车将变成无人驾驶的情况,驾驶行业正面临着AI+的变革。
对于很多高中生、职校学生或高校学生来说,不管是否是计算机类专业,在未来人工智能的发展背景下,都需要了解相应的智能驾驶科普知识。自动驾驶科普教育为学生打开了认知智能驾驶行业的大门,让学生了解和懂得自动驾驶基础的知识,在未来专业选择和自动驾驶产业发展的更迭中,拥有更理性的判断,更好地适应未来发展环境。
北京渡众机器人公司的自动驾驶履带车配备线性履带底盘,搭载各种传感器,采用模块化设计,配合自动驾驶教学课程,方便教师通过教、学、做使学生理解自动驾驶技术的基本概念和相关开发流程。

自动驾驶属于多学科交叉领域,涉及到电子、计算机、通信、汽车与交通等多方面知识。发展智能驾驶教学需要与之匹配的课程体系,于高校或科研机构而言,发展一门新的自动驾驶学科,需要前沿技术、交叉性师资、教材及教学实验室等完善的软硬件配套设施。北京渡众机器人公司的自动驾驶履带车是可实际演示和操作的软硬件平台,是极好的教学帮手。
同时,北京渡众机器人公司的自动驾驶教学实训平台从市场需求出发,提供非标定制产品服务,包含和高等院校的汽车智能技术等相关专业共建、师资力量培训和各种实验实训配套搭建等等。教程、教具均可联合开发,并保持前沿技术的与时俱进更新,以及教育相关产品的不断更新迭代。
三、搭配可移动感知设备实现车路协同实训

北京渡众机器人公司的自动驾驶自主导航履带车搭配智能可移动红绿灯,智能的车+智慧的路,可以进行车路协同实训。
可移动红绿灯配有多个激光雷达、毫米波雷达、视频摄像头等感知终端,实时采集路口车辆、行人、道路限速等信息,通过车联网传送给履带车载终端,便于车载终端根据路端信息来控制履带车的行驶。
通过自动驾驶网联教学车,学生们能更直观地进行单车智能实训和网联赋能实训。
在单车智能实训方面,能协助掌握线控底盘测试、线控底盘故障诊断、全局路径采集、避障控制测试、动力学测试、循迹控制测试、环境感知故障诊断、导航定位故障诊断、毫米波雷达静态测试、毫米波雷达动态测试、双目视觉标定、双目视觉性能测试、激光雷达标定、组合惯导标定等技能。
在车路协同实训方面,能协助掌握弱势交通参与者预警、闯红灯预警、绿波车速引导、协作式优先车辆通行、限速预警等技能。
目前,北京渡众机器人公司的自动驾驶履带车已成功在上海、深圳、北京、河北、山东等地的部分院校落地。后续,渡众机器人将不断创新突破,推动产品迭代升级,在科技赋能“车路云一体化”智能交通的同时,为智能网联汽车产业高技能人才培养提供有力支撑。
这篇关于智能网联汽车实训教学“好帮手”——渡众机器人自动驾驶履带车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









