本文主要是介绍【点云surface】 凹包重构,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
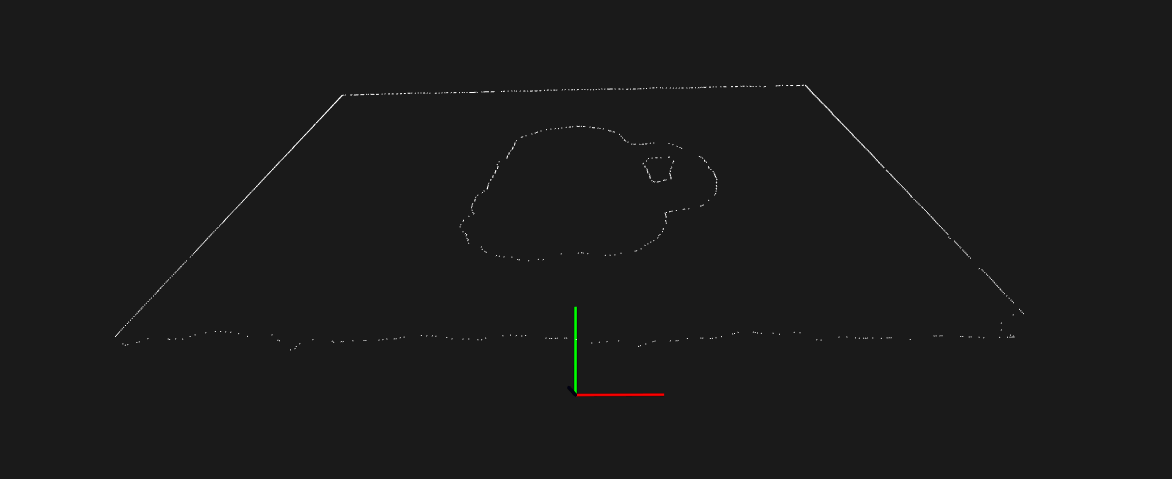
1 处理过程可视化

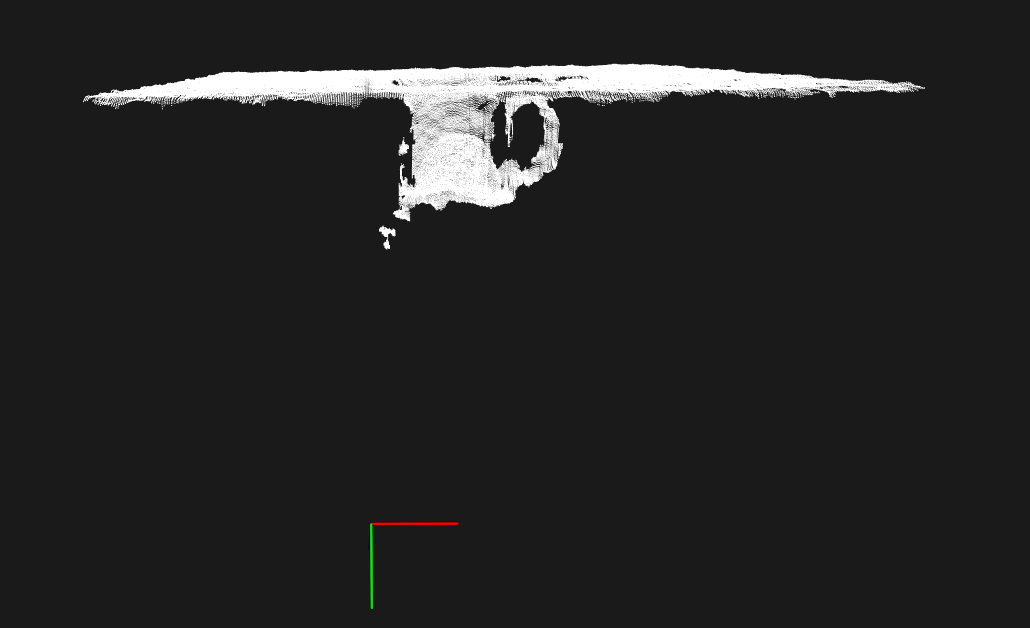

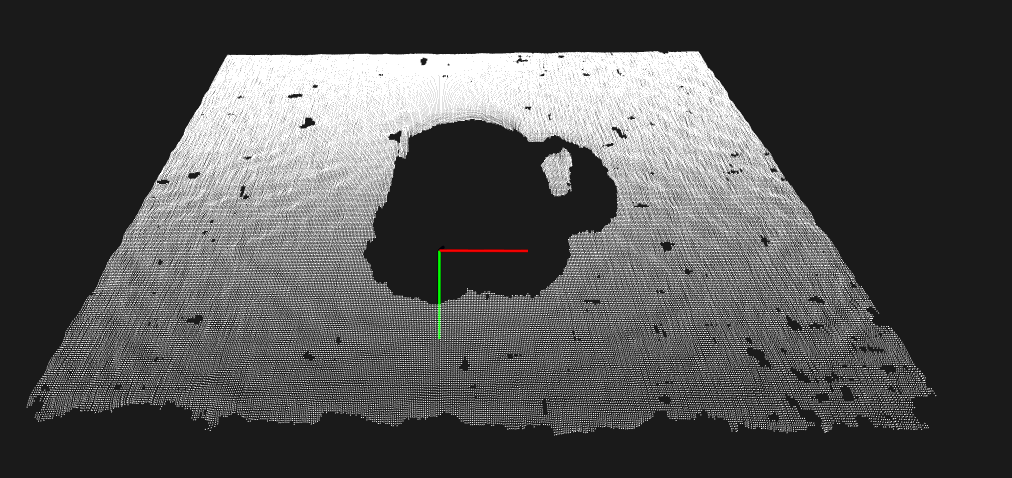

2 处理过程分析:
原始点云 ---> 直通滤波 --> pcl::SACSegmentation分割出平面 -->pcl::ProjectInliers投影 --> pcl::ConcaveHull凹包重构
2.1 有一个步骤可以被替换
pcl::ProjectInliers这步骤是将直通滤波过滤得到的结果,全部投影到pcl::SACSegmentation分割到的平面上。这一步可以用pcl::ExtractIndices代替,其直接提取属于平面的点云。替换后不影响后面的凹包重构结果
2.2 凹包与凸包的区别
凹包是最小外接,凸包是最大外接,详情可以看下面这篇博客
PCL计算ConvexHull凸包、ConcaveHull凹包_pcl::concavehull_com1098247427的博客-CSDN博客
3 凹包参数探究
该算法中有许多参数可设置:
setAlpha(double alpha):设置凹凸包计算的精细程度。alpha参数控制了计算凹凸包时使用的半径大小。较小的alpha值会产生更精细的凹凸包,而较大的alpha值会产生更粗糙的凹凸包。
setDimension(int dim):设置凹凸包计算的维度。dim参数指定了计算凹凸包的维度。默认值为3,表示计算三维凹凸包。如果输入点云是二维的,则可以将dim设置为2。
setKeepInformation(bool keep):设置是否保留输入点云的信息。如果将keep参数设置为true,则计算的凹凸包点云将保留输入点云的法线和曲率信息。如果设置为false,则不保留这些信息。
setAlphaMultiplier(double multiplier):设置alpha参数的乘数因子。multiplier参数用于调整alpha参数的值。默认值为1.0,表示使用alpha参数的原始值。
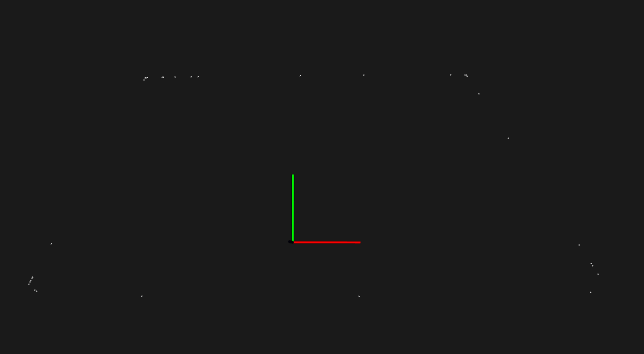
通常只需手动设置alpha参数,其控制了计算凹凸包时使用的半径大小。较小的alpha值会产生更精细的凹凸包,而较大的alpha值会产生更粗糙的凹凸包。
将alpha参数设置为0.01,得到:
4 代码
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/project_inliers.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/surface/concave_hull.h>
#include <pcl/visualization/cloud_viewer.h>#include <pcl/surface/convex_hull.h>
#include <pcl/filters/extract_indices.h>int main()
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>),cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>),cloud_projected(new pcl::PointCloud<pcl::PointXYZ>);pcl::PCDReader reader;reader.read("/home/lrj/work/pointCloudData/table_scene_mug_stereo_textured.pcd",*cloud);pcl::PassThrough<pcl::PointXYZ> pass;pass.setInputCloud(cloud);pass.setFilterFieldName("z");pass.setFilterLimits(0, 1.1);pass.filter(*cloud_filtered);std::cerr << "PointCloud after filtering has: "<< cloud_filtered->size() << " data points.\n";pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);pcl::PointIndices::Ptr inliers (new pcl::PointIndices);pcl::SACSegmentation<pcl::PointXYZ> seg;seg.setOptimizeCoefficients(true);seg.setModelType(pcl::SACMODEL_PLANE);seg.setMethodType(pcl::SAC_RANSAC);seg.setDistanceThreshold(0.01);seg.setInputCloud(cloud_filtered);seg.segment(*inliers, *coefficients);std::cerr << "PointCloud after segmentation has: "<< inliers->indices.size() << " inliers.\n";// 将点云投影到拟合的平面上
// pcl::ProjectInliers<pcl::PointXYZ> proj;
// proj.setModelType(pcl::SACMODEL_PLANE);
// proj.setInputCloud(cloud_filtered);
// proj.setModelCoefficients(coefficients);
// proj.filter(*cloud_projected);
// std::cerr << "PointCloud after projection has: "
// << cloud_projected->size() << " data points.\n" << std::endl;// 直接提取属于平面点云pcl::ExtractIndices<pcl::PointXYZ> extract;extract.setInputCloud(cloud_filtered);extract.setIndices(inliers);extract.setNegative(false);extract.filter(*cloud_projected);pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_hull (new pcl::PointCloud<pcl::PointXYZ>);pcl::ConcaveHull<pcl::PointXYZ> chull;chull.setInputCloud(cloud_projected);chull.setAlpha(0.1);chull.reconstruct(*cloud_hull);std::cerr << "Concave hull has: " << cloud_hull->size()<< " data points.\n" << std::endl;pcl::visualization::CloudViewer vis("cloud visualization");vis.showCloud(cloud_hull);while(!vis.wasStopped()){}}这篇关于【点云surface】 凹包重构的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





![[机缘参悟-222] - 系统的重构源于被动的痛苦、源于主动的精进、源于进化与演进(软件系统、思维方式、亲密关系、企业系统、商业价值链、中国社会、全球)](https://i-blog.csdnimg.cn/direct/fd1df13932fb4df09c34297f62f78bf0.png)


