本文主要是介绍什么是轮式里程计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
里程计的基石 - 码盘
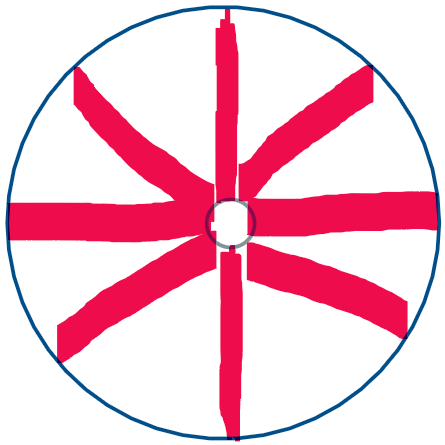
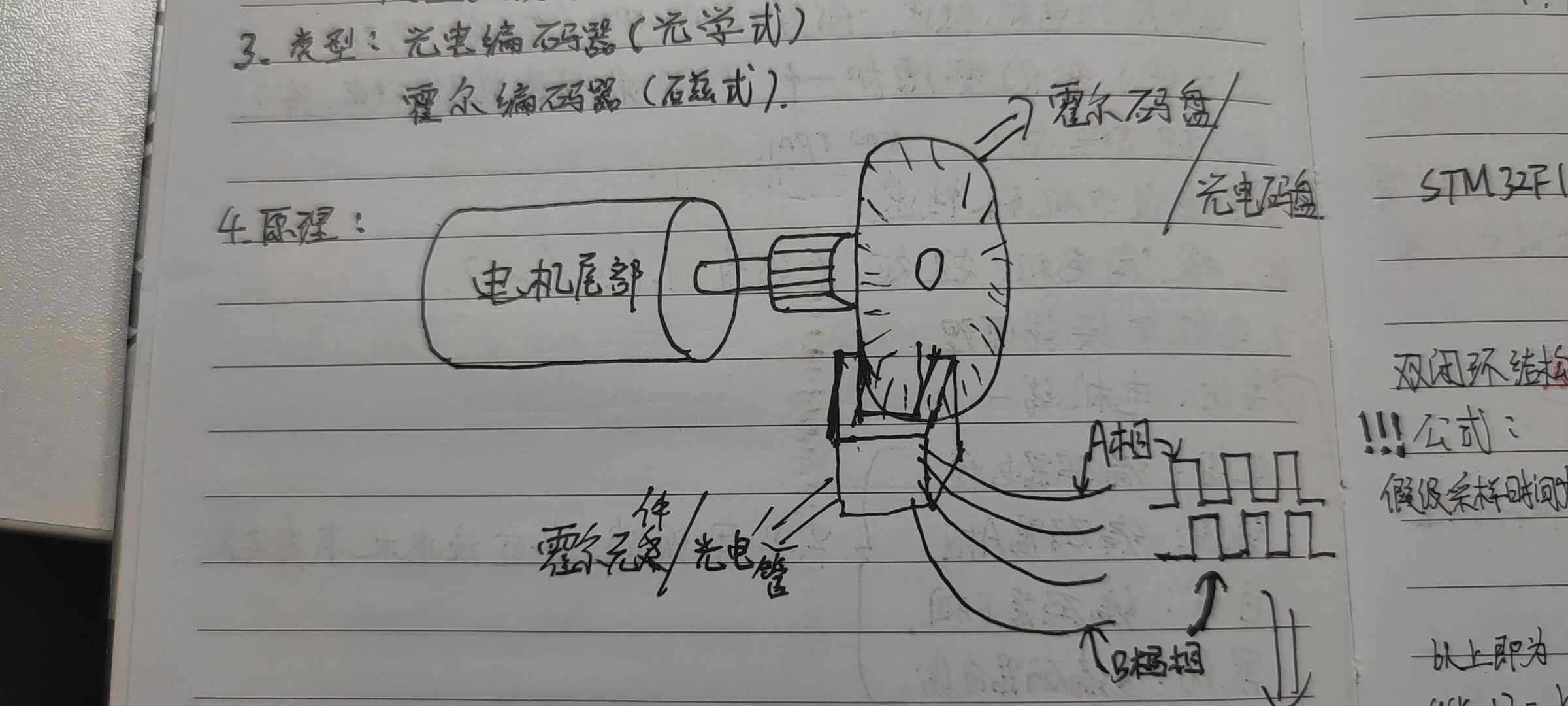
这是一个非常丑的码盘,它可以分为8个刻度,红色区域是吸光区,白色区域为透光区。这个码盘粘在电机上,当电机转动时,带动码盘转动。电机本身又通过减速箱与轮子相接最终大概构图为:
码盘可以得到什么?
真实线速度
经过光电管后,每次码盘转动都会产生一次脉冲,mcu可以通过中断记录两次脉冲之间的时间 △t ,已知这个时间,已知两个码盘间的距离,就可以算出来这段时间的真实速度(线速度 精度为 mm/s)。
里程
我们扫地机的码盘采用的是磁码盘,码盘转一次走过8个刻度,轮子通过减速箱与码盘产生联系,大概关系为:

比如我们的扫地机左右轮,周长 267mm , 轮子转一圈,经过了335个脉冲(刻度),那么每个脉冲对应的行走距离就是 :
odom = 267 / 335 = 0.797 (mm / 刻度)
那么如果我们左轮走了10000个刻度,就相当于走了 7970 mm
以上就是如何通过码盘获取每个轮子的里程。
扫地机速度闭环
上面讲了我们可以通过码盘获取左右轮真实速度,我们还可以通过PWM + 电机驱动芯片控制轮子的实际速度
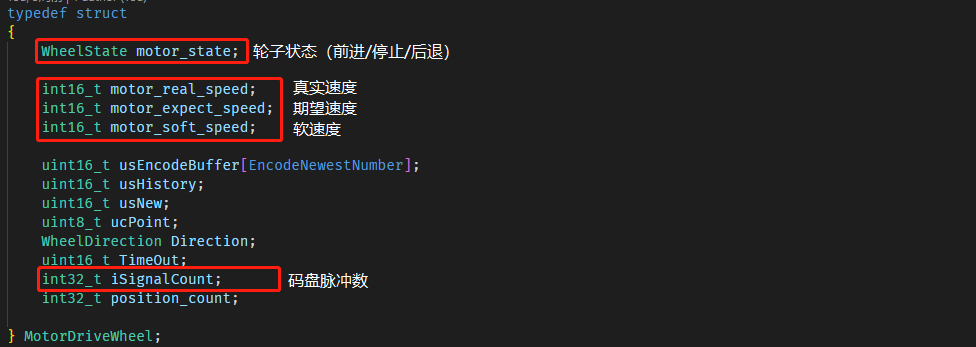
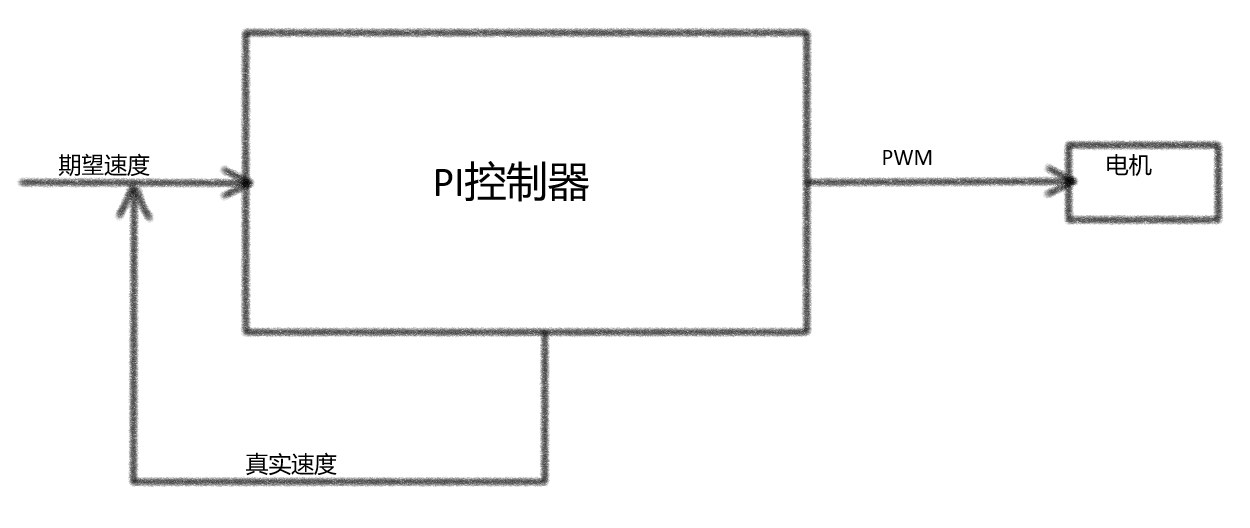 上面是一个精简的PID控制器,所有与轮子相关操作的均在一个线程内:
上面是一个精简的PID控制器,所有与轮子相关操作的均在一个线程内:

从linux下发一次线速度角速度,到底层控制电机转动,经过了如下步骤

也就是说,Linux下发的线速度角速度,mcu把它解释为左轮期望速度和右轮期望速度,经过软加速后,放到PID控制器里做闭环。
基于里程计航迹推算(定位建图)
编码器推算轨迹:(直接对距离做分解累积误差相对较小,最终精度1%以内,如果做修正,同时航向角较准确的情况下精度可以达到0.1%以内(已经实测))
编码器每一个脉冲对应实际轮子行走的直线距离系数为:
rate_encoder = 2𝛑r/sum_encoders
其中r为车轮半径, sum_encoders 为轮子走动一圈的编码器的脉冲总数。
单位时间∆t内编码的增量为:
inc_encoder = encoder_now – encoder_last (当前编码器值减去上次编码器值)
则单位时间机器人移动的距离为:
∆d = inc_encoder * rate_encoder
世界坐标系下x、y方向累计里程分别为:
Xw = Xw + ∆xw = Xw + ∆d * cos(θ)
Yw = Yw + ∆yw = Yw + ∆d * sin(θ)
其中航向角θ的获取分两种情况:
- 底盘带具有稳定航向角的IMU,此方式可以使得最终解算的位置十分准确(电子罗盘受电机干扰交大不可用)
θ直接等于IMU的航向角Yaw。(IMU的Yaw上电为0,刚好和车的航向角一致) - 依靠底盘两个轮子上精确的编码器推算航向角。
两轮编码器单位时间内增量分别为 inc_encoder_r、inc_encoder_l
单位时间内两轮扭动的距离差为 lenth_error = (inc_encoder_r- inc_encoder_l) * rate_encoder;
由⑤得:由距离差得单位时间内角度差为 anlge_z_error = lenth_error / 2d;
根据编码器累计的角度θ为 anlge_z += anlge_z_error。
此方式非常依赖编码器精度,有累计误差,效果不如直接使用IMU的好。
这篇关于什么是轮式里程计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





