轮式专题

轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合
轮式里程计(Wheel Odometry)和惯性测量单元(IMU)的融合通常采用某种形式的滤波技术,最常见的是卡尔曼滤波器(Kalman Filter)或其变体,如扩展卡尔曼滤波器(Extended Kalman Filter, EKF)、无迹卡尔曼滤波器(Unscented Kalman Filter, UKF)或粒子滤波器(Particle Filter)。这些滤波器能够综合两种传感器的优势,

激光SLAM入门笔记(二):轮式里程计模型及标定
轮式里程计模型及标定 1.模型1.1 两轮差分底盘的运动学模型(以下简称运动模型)1.1.1 目的已知量未知量图 1.1.2 推导 r r r w w w v v v向量表示 1.2 航迹推算递推公式图 2.标定2.1 线性最小二乘的基本原理2.1.1 基础知识线性方程组最小二乘解 2.1.2 最小二乘求解 2.2 线性最小二乘的直线拟合直线拟合 2.3 线性最小二乘在里程计标定中的应用

gazebo抓取/轮式底盘仿真问题汇总
记录gazebo仿真中各种疑问 1、启动gazebo仿真环境后机器人不下落 <launch><arg name="world_name" default="worlds/empty.world"/><include file="$(find gazebo_ros)/launch/empty_world.launch" ><arg name="paused" value="true" /><ar
ros小问题之差速轮式机器人轮子不显示(rviz gazebo)
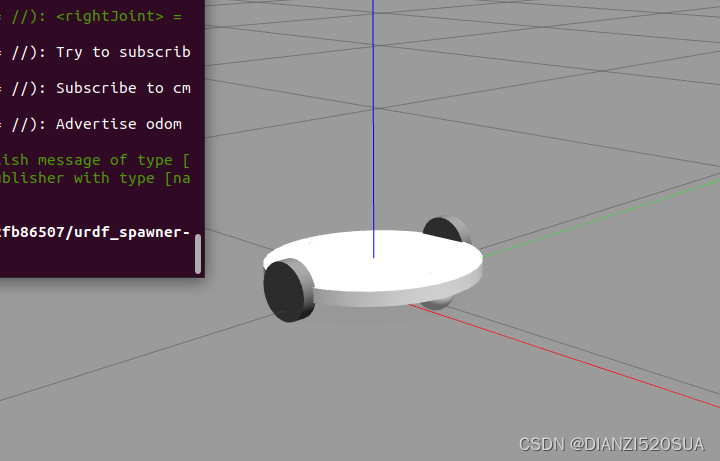
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图, 后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子,精简了代码。找到定义轮子的xacro文件,在惯性那行增加xacro:即可,如下图所示,否则会找不到相关的值替换,自然不显示。 最终效果如下。 其他部件
【轮式平衡机器人】——TMS320F28069片内外设之eCAP
引入 TMS320F28069的eCAP(增强型捕获模块)是一个强大的外设,用于精确测量和捕获输入信号的事件和时间戳。 在电机控制、传感器数据采集和信号处理等应用中,eCAP模块可以用于测量霍尔传感器、编码器或其他数字输入信号的周期、频率和相位等信息。通过捕获这些信号的事件和时间戳,用户可以精确地控制电机转速、位置和方向,或者实现精确的数据采集和分析。 一、eCAP模块基本介绍 1、特
IMU/电子罗盘/轮式编码器的多传感器融合(非线性卡尔曼滤波)
传感器分析 电子罗盘(Compass/magnetometer) 对于平面运动机器人而言,只需要xy平面上的数据即可求出来绝对角度,这里电子罗盘需要做椭圆->圆的传感器标定。 电子罗盘上车的标定方法参考: 轮式移动机器人惯性定位系统的研发.pdf_人人文库网分类号 U D C 密级 学校代号 118 4 5 学号 2 1111 0 4 0 7 9 广东工业大学硕士学位论文 工学硕士 轮式移
【轮式平衡机器人】——TMS320F28069片内外设之ADC
一、ADC概述 这一部分不是我们的重点,原理分类啥的这里简要说明! 步骤:采样、保持、量化、编码 将采样电平(模拟值)转换为数字值的方法:直接比较型(并行ADC、逐次逼近型ADC);间接比较型(双积分型ADC) 关键技术指标:分辨率、转换速率、量化误差、偏移误差、满刻度误差、线性度。 其他技术指标:绝对精度、相对精度、微分非线性、单调性和无错码、总谐波失真和积分非线性。 TMS320F

【轮式平衡机器人】——角度/速度/方向控制分析软件控制框架
轮式平衡机器人具有自不稳定性,可类比一级倒立摆系统的控制方法,常见有反馈线性化方法、非线性PID控制、自适应控制、自抗扰控制,还有改进的传统缺乏对外界干扰和参数改变鲁棒性的滑模变结构控制。我们采用较为简单的双闭环PID控制实现平衡模型。 一、角度平衡控制(PD内环) 由上面的系统传递函数可知,该系统一共2个极点,但根据奈奎斯特判据,其中一个极点位于s平面的右半面会引起系统的不稳定性,可

Momenta“飞轮式L4”接受夜间长尾场景「像素级」挑战,表现堪比老司机
7月20日,Momenta以一段视频的形式披露其“飞轮式L4”技术在夜间长尾场景中的精彩表现。 继今年5月Momenta应用“飞轮式L4”技术的享道Robotaxi,应对白天多个城市复杂场景的视频披露之来,“飞轮式L4”技术的夜间长尾场景应对能力也在本次视频中得以展现。飞轮式L4“白加黑”能力闭环的持续进化迭代,也拉近了L4自动驾驶和人们日常生活之间的距离。 随着夜幕降临,驾驶视线、道路状况、
Momenta“飞轮式L4”接受夜间长尾场景「像素级」挑战,表现堪比老司机
7月20日,Momenta以一段视频的形式披露其“飞轮式L4”技术在夜间长尾场景中的精彩表现。 继今年5月Momenta应用“飞轮式L4”技术的享道Robotaxi,应对白天多个城市复杂场景的视频披露之来,“飞轮式L4”技术的夜间长尾场景应对能力也在本次视频中得以展现。飞轮式L4“白加黑”能力闭环的持续进化迭代,也拉近了L4自动驾驶和人们日常生活之间的距离。 随着夜幕降临,驾驶视线、道路状况、
三款经典的轮式/轮足机器人讲解,以及学习EG2133产生A/B/C驱动电机。个人机器人学习和开发路线(推荐)
1,灯哥开源(有使用指南,适合刚入门新手) 机械部分:2个foc无刷电机 硬件和软件部分:没有驱动板子。只有驱动器,主控板esp32和驱动器通过pwm直接通讯。驱动器板子上有蓝色电机接口,直接驱动电机。2个eg2133+1个esp32主控芯片----esp32产生pwm驱动eg2133产生电机驱动的A/B/C相位,开发的实在arduino ide下开发 安装教程:使用指南 开源地址:https: