本文主要是介绍Momenta“飞轮式L4”接受夜间长尾场景「像素级」挑战,表现堪比老司机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
7月20日,Momenta以一段视频的形式披露其“飞轮式L4”技术在夜间长尾场景中的精彩表现。
继今年5月Momenta应用“飞轮式L4”技术的享道Robotaxi,应对白天多个城市复杂场景的视频披露之来,“飞轮式L4”技术的夜间长尾场景应对能力也在本次视频中得以展现。飞轮式L4“白加黑”能力闭环的持续进化迭代,也拉近了L4自动驾驶和人们日常生活之间的距离。
随着夜幕降临,驾驶视线、道路状况、行人心理、其他交通参与者的行为模式都和白天大不相同,所有场景驾驶难度均有不同程度叠加。国际照明委员会(CIE)的相关调查显示:夜间交通事故率是白天的三倍之多。
在发布的视频中,应用Momenta“飞轮式L4”技术的L4车辆也遇到了不少麻烦。炫目远光中“藏匿”横穿马路的行人、大车异型车遮挡路口信号灯、狭窄道路中被车辆和电动车“左右夹击”……而在“飞轮式L4”技术的帮助下,Momenta也顺利完成了这场“黑夜行”。
夜间场景挑战的顺利完成也离不开Momenta量产自动驾驶(Mpilot)与完全无人驾驶(MSD)相结合的“两条腿”产品战略。事实上,“两条腿”产品战略从构建之初,就开始搭载统一的软硬件架构。这使两条腿的关系既非“你先我后”,更非“你壮我瘦”,而是协同进化。进化的结果是更前瞻的“飞轮式L4”研发、更贴近用户的量产数据回流,这也让两条腿的协同优势越发显著,实现左右腿产品的快速迭代。
一、夜间高难场景之:“预判了行人的预判”,准确避开远光盲区中的行人
多项数据显示,夜间交通事故中与滥用远光灯有关的事故占比接近35%,且呈不断上升趋势。这是因为当光强度剧增时,瞳孔来不及调节大小,大量的光直接刺激到视觉神经,造成轻则眼花,重则暂时性失明。
在Momenta L4车辆行驶在马路上时,远处就迎面驶来一辆开启远光灯的车辆,从驾驶员视角可以看到一片炫目白光。在这种情况下,很难分辨出远光之中,是否“藏匿”着行人。
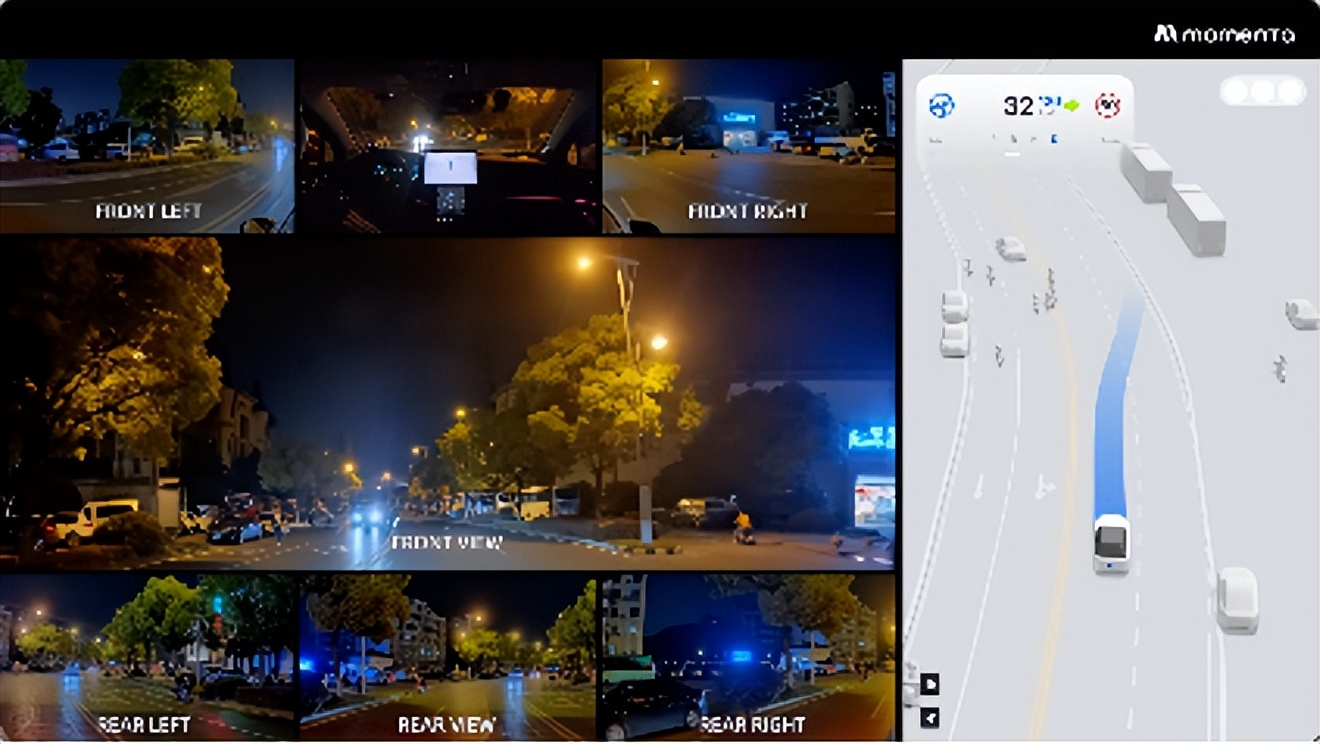
对向车辆开启远光,驾驶员视角很难分辨出远光之中,还“潜藏”着三四名准备横穿马路的行人
而采用Momenta“飞轮式L4”的车辆,利用多传感器感知融合能力,在较远距离外就准确感知到藏匿于远光之中,4名准备横穿马路的行人。
“看得到”只是第一步,准确预测行人的动机和意图也是自动驾驶中的重要一环。Momenta“飞轮式L4”利用数据驱动的方式,构建出准确的多模态预测系统,以此预测行人更接近现实生活中的行为。
例如,夜间行人在非斑马线处横穿马路时,如遇对向来车,大多数行人通常会预判车辆正常通行,因此不会直接横穿,而是选择“斜行向前”。这时如果直接刹停,反倒让行人陷入“我先走还是车先走”的犹豫之中,这种犹豫将引入更多潜在危险,并非最佳驾驶策略。先降速至安全范围,预判到“行人对车辆的预判”后,慢速绕行通过才更接近老司机驾驶策略,正所谓“我预判了你的预判”。
在感知到远光中“藏匿”的行人后,Momenta L4自动驾驶车辆车速从40km/h缓慢降至20km/h左右,并向右平稳变道避开横穿行人。保障行人安全的同时,兼顾通行效率。
二、夜间高难场景之:路口异型车临停,绕还是不绕?这是一个问题
由于城区限行等多方面原因,夜间一到,很多白天并不易见的大车、异形车开始频繁出现在路面上。
在Momenta此前对外展示的诸多场景中,“飞轮式L4”技术对大车、异型车的感知识别能力优势早有体现。这是因为在Momenta“飞轮”的驱动下,包括清扫车、道路救援车、牛车、车辆运输车等在内的海量异型车数据源源不断地输入。而利用闭环自动化工具链,“飞轮式L4”又可以从这些原始数据中自动化地筛选出“黄金数据”,高效、低成本地使Momenta L4车辆更快感知、识别出更多长尾大车异型车。
不光如此,“飞轮式L4”在利用数据学习的过程中,还会不断提升数据积累的多样性。以载货板车为例,既要学习、识别载货状态下的板车,也要识别空载状态下的板车。既要认出它白天的模样,也要知道它夜晚的模样。
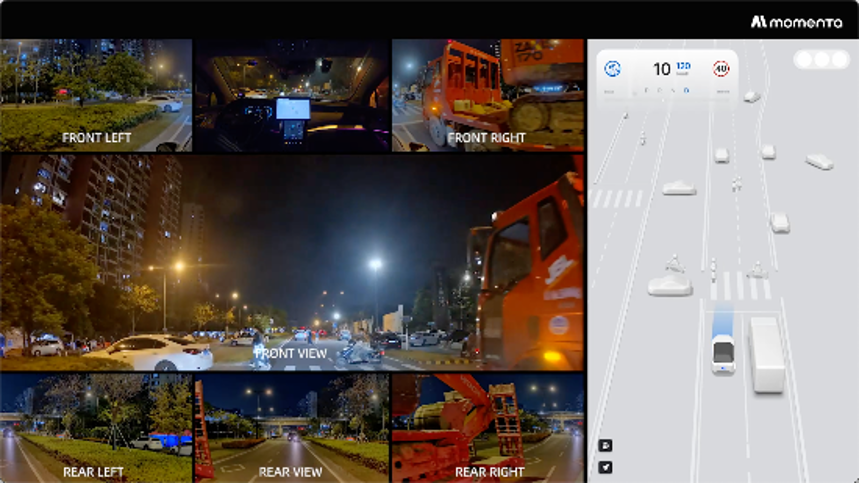
这不,这次在夜间遇到的这辆异型车,连人类司机一时间都难以确认它的类型。但Momenta L4自动驾驶车辆还是准确感知、识别出了异型车,并做出快速应对。
前方大异型车遮挡路口
这一夜间场景下,异型车并非单一难点。更大的难点在于其停车位置恰好位于路口,其高度恰好遮挡红绿灯位置。这种情况下,无论是人类驾驶员还是自动驾驶车辆,都难以看清路口是否有红绿灯。这种情况下,不足以判断大车究竟是遇红灯停车,还是临时停车需要绕过。
绕还是不绕,这是一个问题。但在数据驱动算法的帮助下,自车在大车后方短暂停下后,快速根据左侧车道的畅通车流判断路口处于可通行状态,并迅速规划出一条绕行路线并进行绕障。用点评嘉宾的话来说,“先停车观察,后快速绕障”非常接近老司机驾驶风格,因为如果直接贸然变道,然后发现路口不可通行,再变道回来也非常困难。
Momenta“飞轮式L4”技术对大车、异形车的感知识别能力,也在HMI(人机界面)上得以体现。以自车遇到的另一辆载货板车为例,显示屏上的显示模型跟真实车辆十分接近。这不光体现出Momenta“飞轮式L4”对大车、异型车的精细感知与分类,更能为驾驶舱内的乘客带来更多的心理安全感。

HMI(人机界面)上显示三轮板车,同真实车辆外观十分接近
三、夜间高难场景之:更快、更急、更危险
随着夜幕降临,不光车辆会比白天更复杂,道路情况和其他道路参与者的行为模式也会发生变化。
例如,在小区之间的窄路,白天通行尚属正常。但夜间很多人将车停在小区路旁,导致可通行车道迅速变窄,通行难度也大大提升。另外,进入春夏季节后,人们的夜间外卖需求增加,自己驾驶电动车、自行车出行频率也明显增加。这些快速通行的小车,在夜间都会给安全驾驶带来较大挑战。
例如,在Momenta L4车辆刚刚绕过路口大车后,前方立刻出现了一辆电动车“鬼探头”。Momenta“飞轮式L4”快速、精准感知到快速移动的交通参与者,并准确预测其下一步行动路线。从车速里程表可以看出,电动车刚刚出现时,自车车速就几乎没有延迟地立刻下降直至刹停。
在绕过大车后遇见电动车“鬼探头”,自车立刻减速刹停保障行人安全
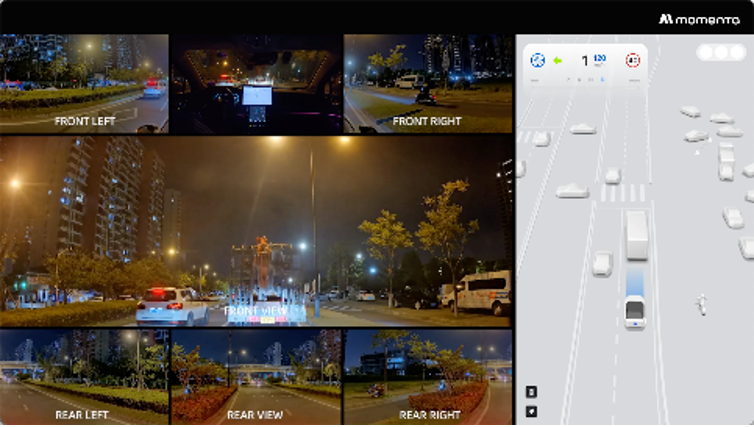
随后,Momenta L4车辆又驶入两侧停满车辆的狭窄小路,这也是下班时间后的常见路况。这不,前方恰好遇到了一辆正在侧方入库的车辆。在感知到其入库行为后,自车准备向左避让。然而这时,左后方突然从视线盲区闯入一辆快速行驶的电动车。

后方车辆左侧突然冲出二轮电动车
既要及时看到左后方突然闯入视线的车辆,又要兼顾右侧入库车辆,在避让过程中不刮蹭到任何一方。对于很多老司机来说,都认为这种情况下很难做到及时、快速地反应。
而采用Momenta“飞轮式L4”的自动驾驶车辆,在向左避让入库车辆的同时,快速、准确地感知到了左后方快速移动的电动车,在数据驱动算法的帮助下,成功规划出一条完美保持左右间距的“极限微操”路径,既安全又聪明地通过该场景。
Momenta L4可以应对各类夜间复杂场景,这与“飞轮式L4”技术的优势密不可分。凭借强大的多传感器融合感知能力,结合已有的海量数据,Momenta L4车辆可以精准看见、看清人类驾驶员在夜间“来不及看到、看清”的目标。而利用数据驱动的算法,自车可以在复杂场景中,迅速做出最接近“老司机”的预测和规控行为,让驾驶舱内的乘客更有安全感。通过Momenta高效的“闭环自动化”工具链,可进行黄金数据高度自动化挖掘和高度自动化标注,实现对海量数据处理的高效自动化迭代,相关场景的处理能力也随之迅速提升。
Momenta“飞轮式”L4技术自2019年发布起,就一直凭借“飞轮”的强大动力在快速进化迭代。2020年10月,搭载了“飞轮式L4”的Robotaxi产品Momenta GO在苏州正式发布。2021年12月,Momenta完全无人驾驶MSD获得中国汽车零部件产业年度贡献奖——即铃轩奖前瞻智能驾驶类优秀奖。同月,应用了Momenta“飞轮式L4”的享道Robotaxi也正式启动运营,这也是Momenta在L4技术商业化落地的又一重要里程碑。
关于Momenta:
Momenta是全球领先的自动驾驶公司,致力于通过突破性的AI科技,创造更美好的未来智慧出行。为实现可规模化的完全无人驾驶,Momenta基于数据驱动的“飞轮”技术洞察,以及量产自动驾驶(Mpilot)与完全无人驾驶(MSD)相结合的“两条腿”产品战略,提供不同级别的自动驾驶解决方案,更高效快速地实现无人驾驶规模化落地,赋能更安全、便捷、高效的未来智慧出行。
这篇关于Momenta“飞轮式L4”接受夜间长尾场景「像素级」挑战,表现堪比老司机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




