本文主要是介绍Python点云处理(十九)点云地面点提取——CSF布料模拟算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 0 简述
- 1 算法原理
- 2 具体步骤
- 3 实现
0 简述
对于点云地面点滤波,众多传统算法滤波效果容易受到地形特征的影响(通常在复杂场景及陡峭地形区域滤波效果较差)且常常需要用户对数据有较为丰富的先验知识来进行设置滤波器中的各种参数。为了解决这些问题,张吴明教授等人提出了“布料”滤波算法(CSF)。
1 算法原理
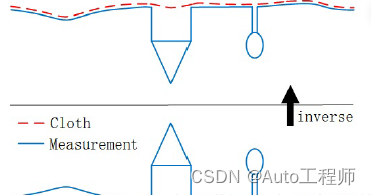
传统的滤波算法大多是考虑在坡度、高程变化之间的不同来进行区分地物点与地面点,而布料滤波算法从一个完全新的思路来进行滤波,首先把点云进行翻转,然后假设有一块布料受到重力从上方落下,则最终落下的布料就可以代表当前地形。如下图所示,可以帮助我们进行理解。
2 具体步骤
1)通过第三方软件去除原始LiDAR点云数据中的“孤立点”。
2)反转LiDAR点云。
3)初始布料格网,这时用户需要设置格网的大小(grid resolution, GR)。初始“布料
这篇关于Python点云处理(十九)点云地面点提取——CSF布料模拟算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







