本文主要是介绍Atlas 200DK和设环境下跑通华为官方例程 YOLOV3_coco_detection_video和FairMOT多目标轨迹检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Atlas 200DK和设环境下跑通华为官方例程 YOLOV3_coco_detection_video和FairMOT多目标轨迹检测
文章目录
- Atlas 200DK和设环境下跑通华为官方例程 YOLOV3_coco_detection_video和FairMOT多目标轨迹检测
- 前言
- 一、和设环境部署前准备
- 1.基本准备
- 2.清空sd卡
- 二、环境部署
- 1.烧录dd镜像
- 2.开发板启动
- 3.开发板连接PC机
- 1.USB端口连接
- 2.网络连接
- 4.通过网络共享方式接入互联网
- 三、和设环境下运行官方例程
- 1、安装依赖
- 2、运行华为官方例程 YOLOV3_coco_detection_video
- 2、运行华为官方例程 FairMOT多目标轨迹检测
前言
分设环境的部署可以参考下面这篇文章:https://blog.csdn.net/weixin_42800966/article/details/122587832?utm_source=app&app_version=5.3.1
一、和设环境部署前准备
1.基本准备
- 【Atlas 200 DK开发者套件】、【USB-Type-C数据线(高速数据线)】和【网线】、【64G以上高速SD卡】、【高速读卡器】。(注意,如果不是高速的,会出现无法识别设备以及烧写失败等系类情况)
- MobaXterm(合设环境的情况下,使用MobaXterm便于访问200dk)
- balenaEtcher(合设环境必备,使用balenEtcher工具部署合设环境)
2.清空sd卡
无论是新的sd卡,还是旧的sd卡,都推荐在使用前对sd卡进行一次安全清空。
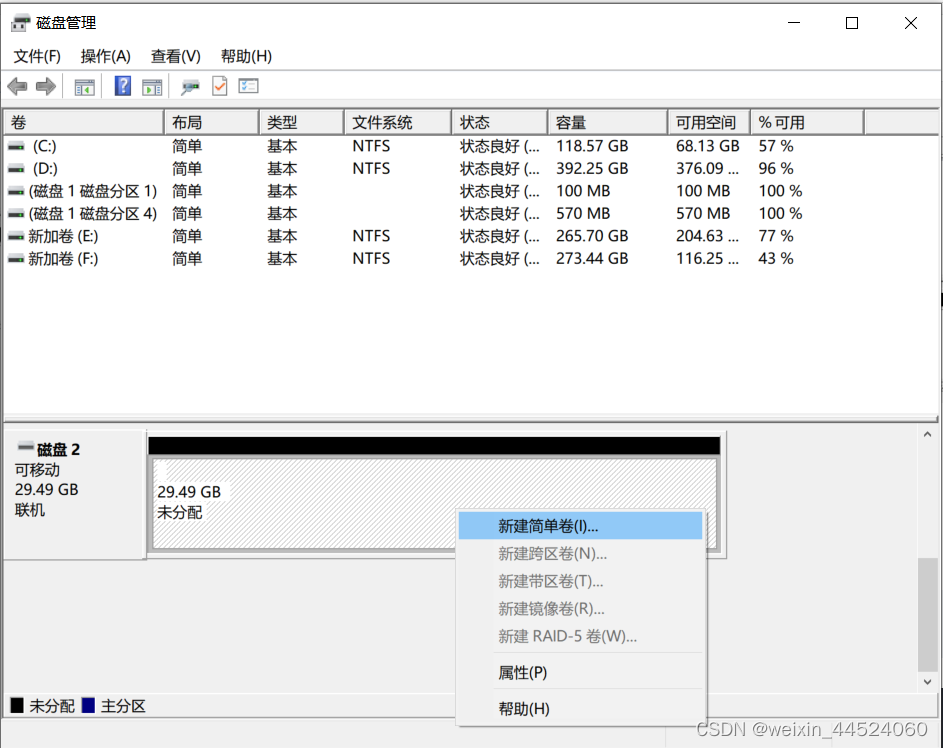
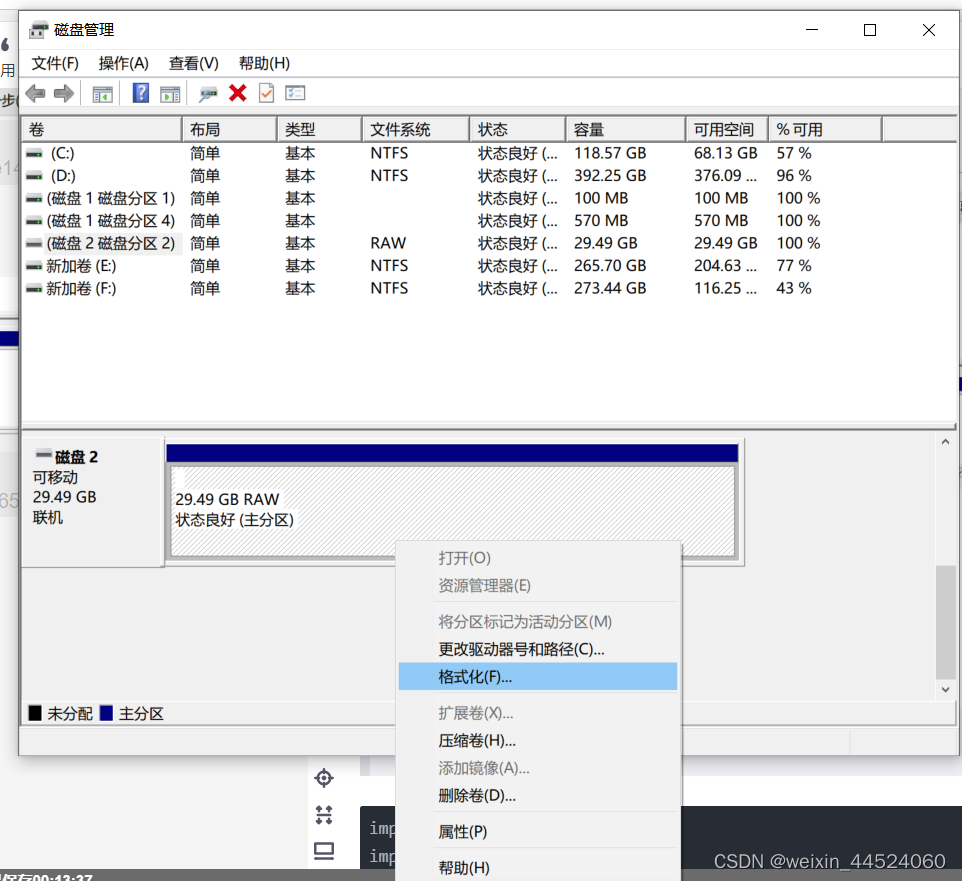
- 将SD卡插入读卡器,然后插入电脑。在【开始】上右击鼠标,然后点击【磁盘管理】:
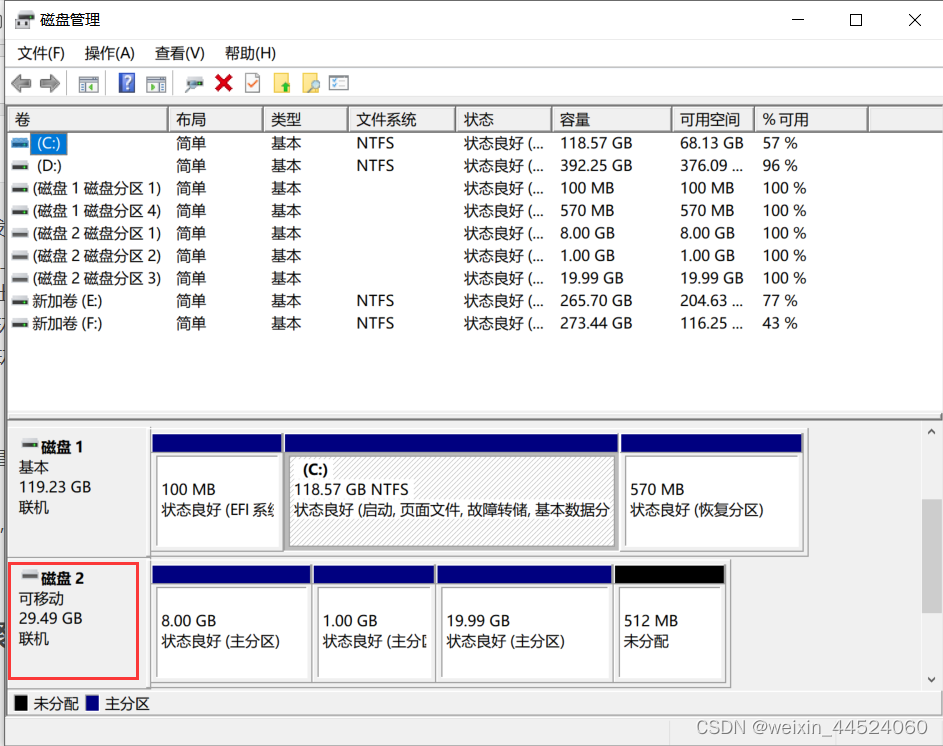
如图磁盘2是我插入的SD卡,可通过内存大小识别。在个分区上点击右键:
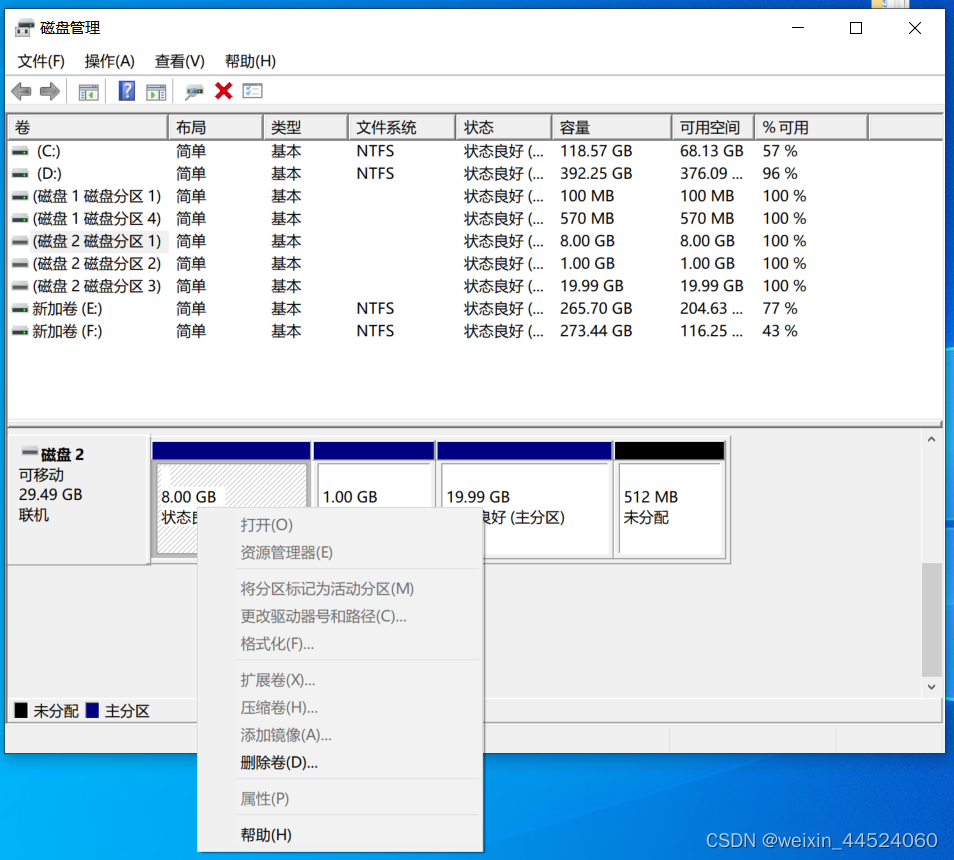
点击【删除卷】如果没有反应就换一个卷先删除,或者多点几遍。
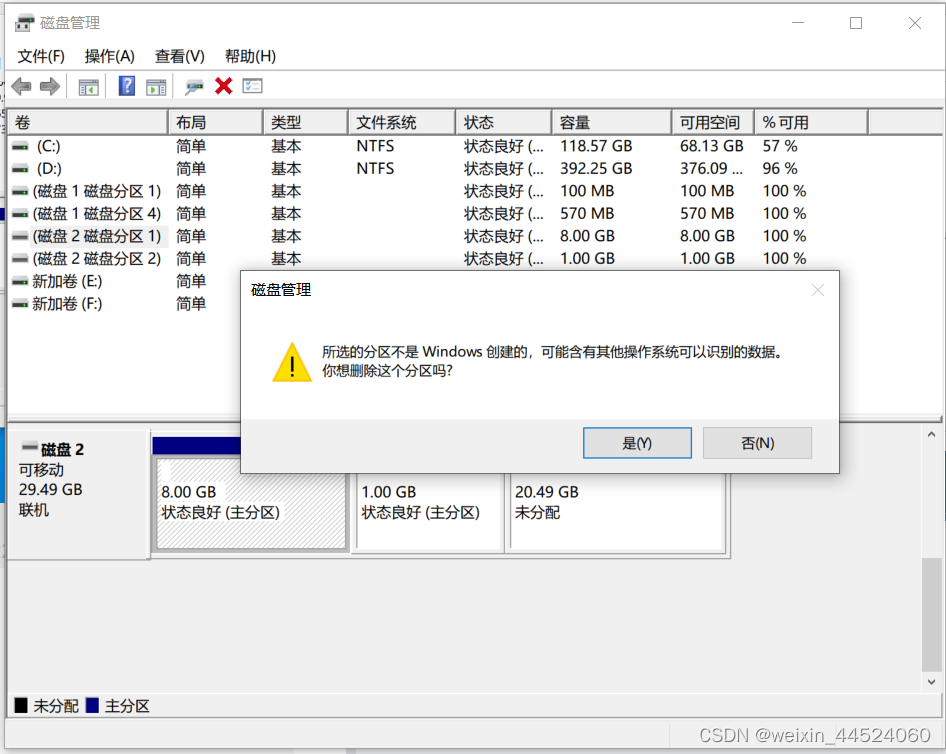
点击【确定】直到整个磁盘显示未分配:
再次右击点击【新建简单卷】:
点击【下一页】
点击【下一页】
一直点击下一页,直到创建主分区完成,
再次右击,点击【格式化】,然后点击【确定】。
二、环境部署
1.烧录dd镜像
进入晟腾dd镜像的帖子:

下载5.0.4alpha005版本
下载完成后打开balenaEtcher
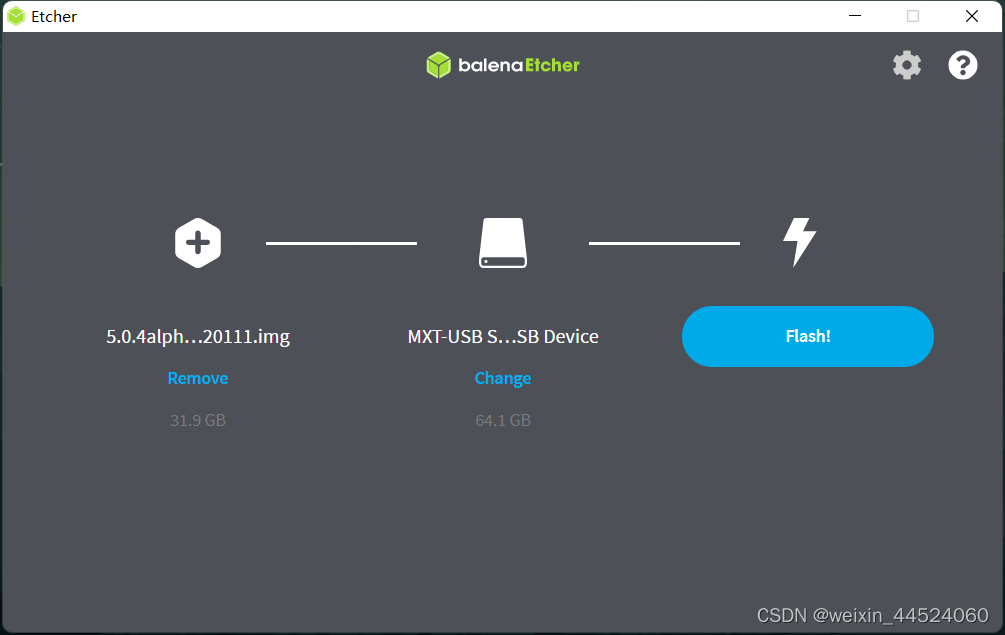
选择好已经下载好的dd镜像包和需要烧录的sd卡,点击Flash!,开始烧录
烧录成功
2.开发板启动
将烧录成功的sd卡插入Atlas200dk,接入电源上电,电源接口旁边的led灯亮起说明能够成功上电,四个led灯亮起,说明开发板成功启动。
3.开发板连接PC机
1.USB端口连接
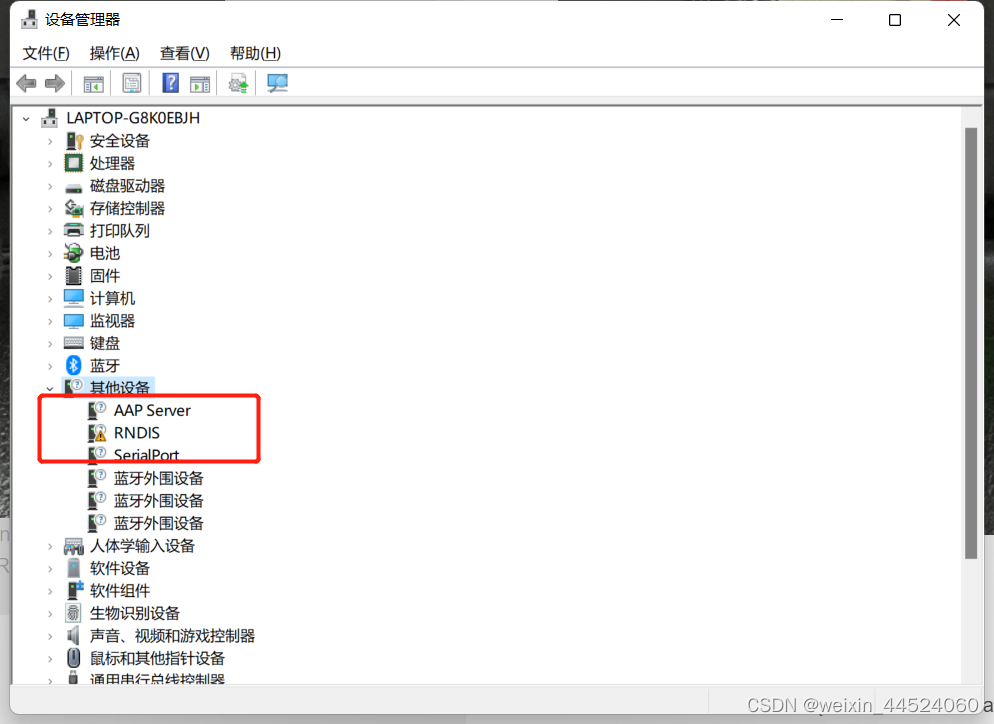
使用USB-Type-C数据线连接开发板和PC机,在PC机打开设备管理器->其他设备,可以看到带有警报标志的RNDIS, 右键点击RNDIS->更新驱动程序
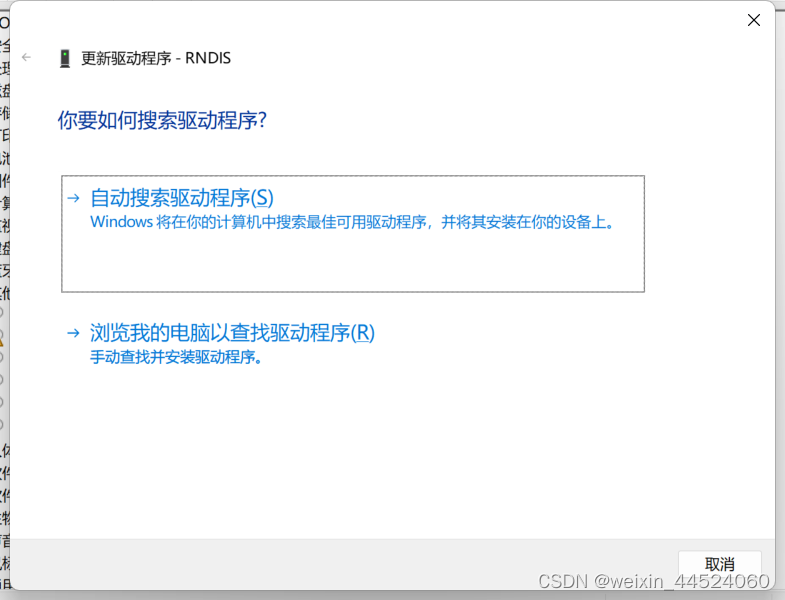
选择“浏览我的电脑以查找驱动程序”
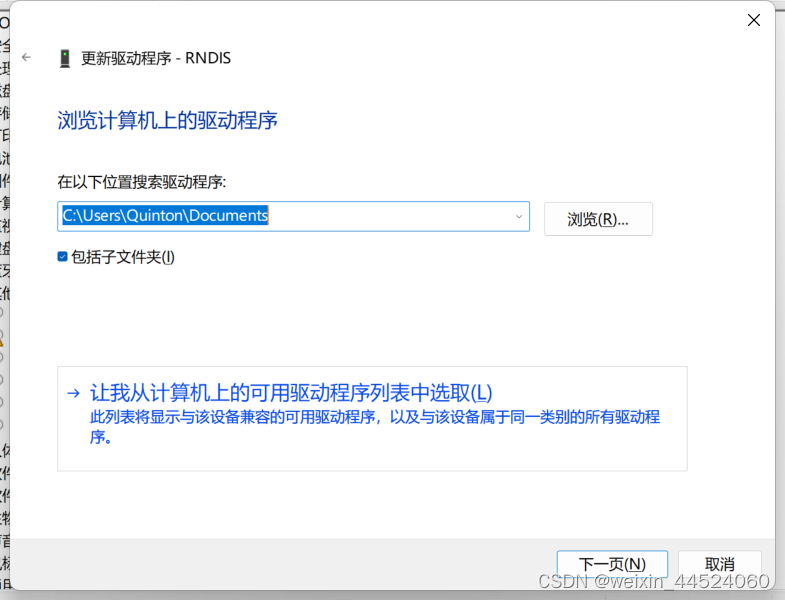
选择“让我从计算机上的可用驱动程序列表中选取”
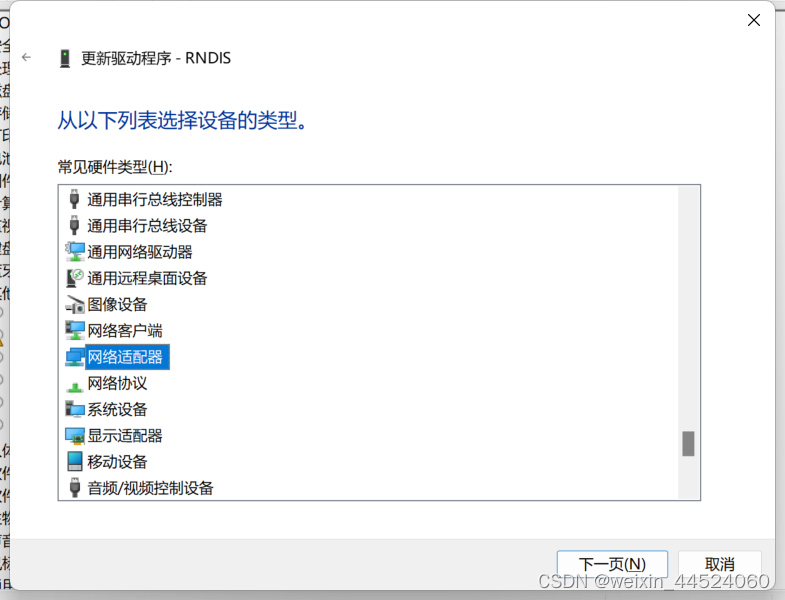
向下滑动,选择“网络适配器”,然后下一页
 厂商选择Microsoft,型号选择USB RNDIS6 适配器,然后下一页
厂商选择Microsoft,型号选择USB RNDIS6 适配器,然后下一页

出现警告,选择“是”
 更新驱动程序完成
更新驱动程序完成
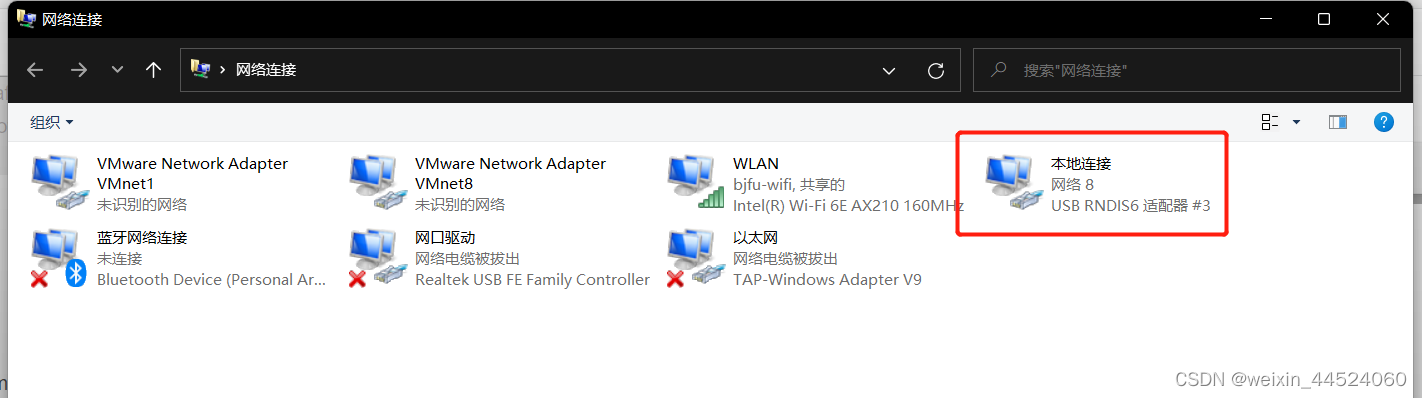
进入网络和Internet->高级网络设置->更多网络适配器选项,可以查看到USB RNDIS6 适配器
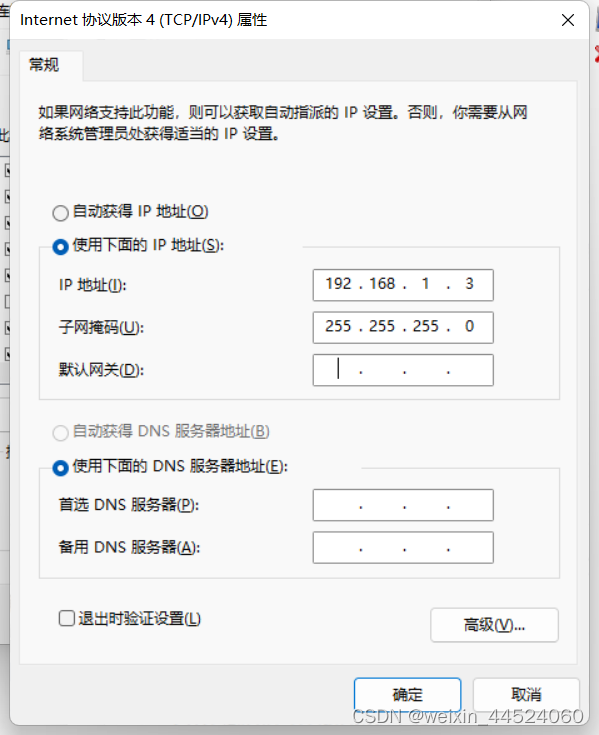
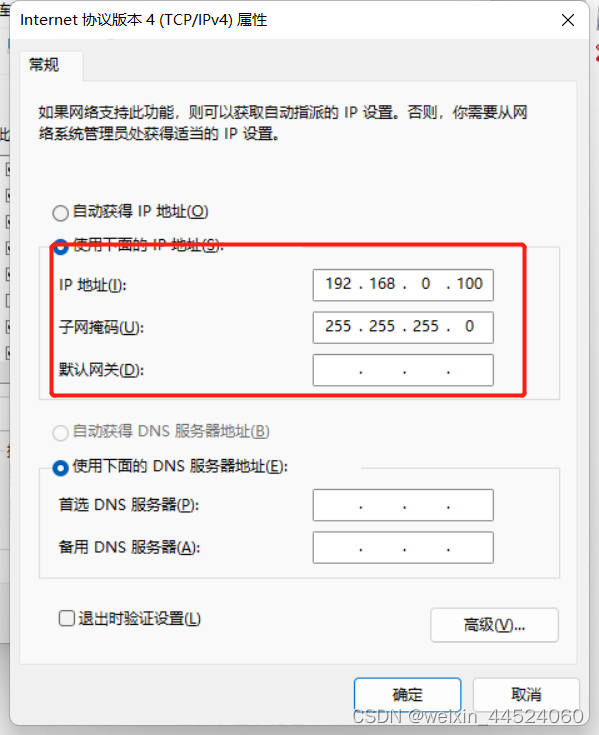
右键点击查看属性,双击ipv4协议
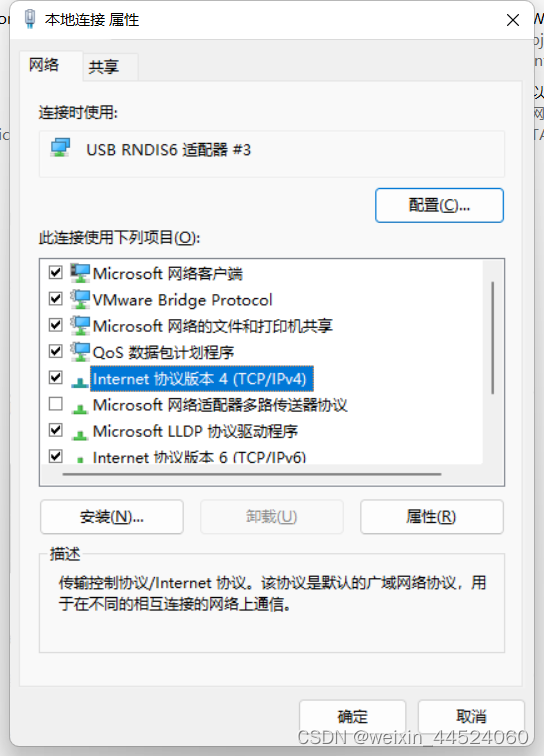
选择”使用下面的ip地址“,将ip地址更改为192.168.1.X, X为0~255除了2以外的数字,点击子网掩码填写框会自动生成子网掩码,点击【确定】。使用USB端口连接的默认ip为192.168.1.2,所以要将PC机网络适配器ipv4的ip地址更改为和其同个网段下
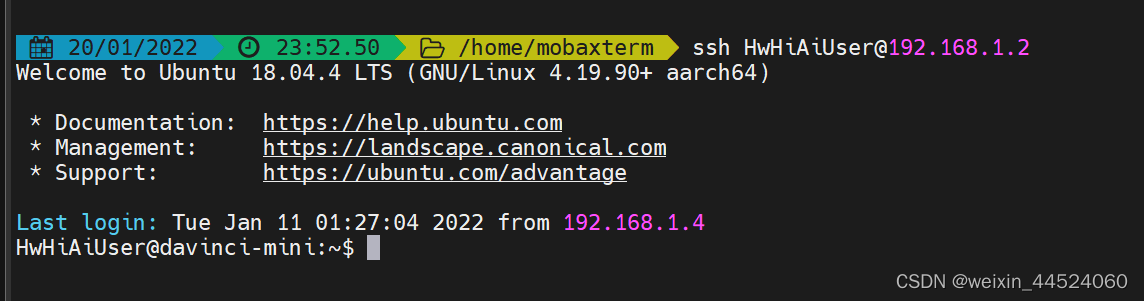
PC机打开cmd或者其它终端(这里使用的是MobaXterm),输入:
ssh HwHiAiUser@192.168.1.2
按下回车键,连接成功
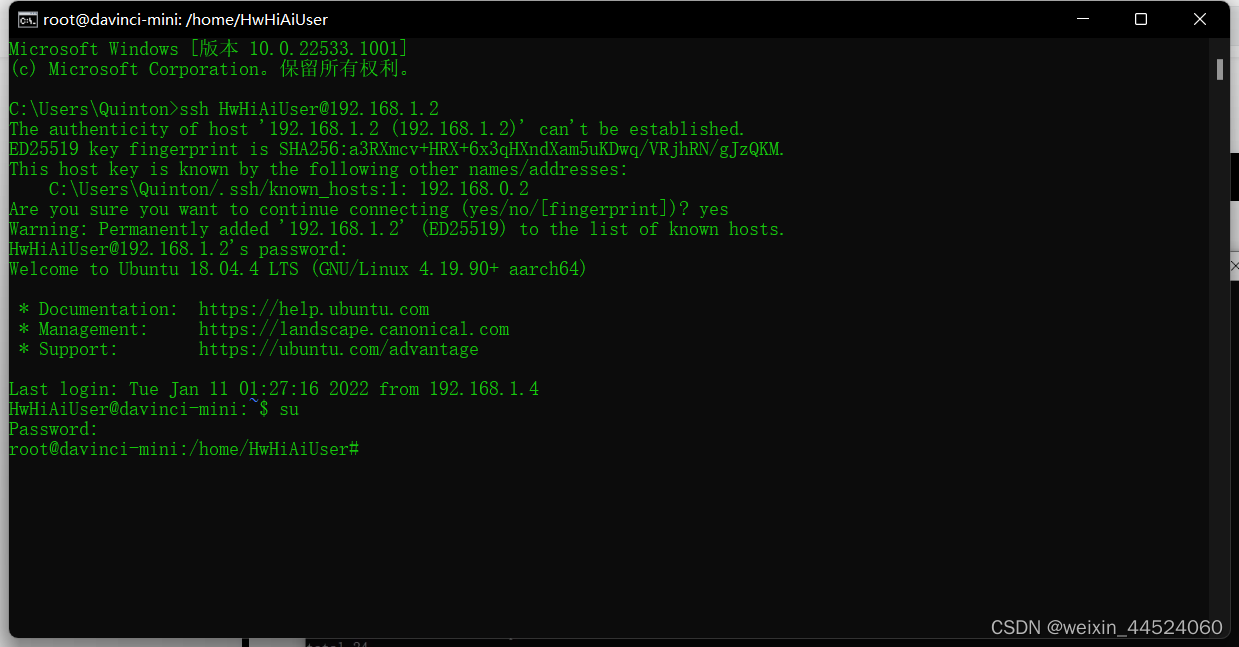
 如果连接需要输入密码,默认密码为Mind@123,进入root模式也是使用这个密码
如果连接需要输入密码,默认密码为Mind@123,进入root模式也是使用这个密码
2.网络连接
使用USB端口连接进入开发板更改网络参数
如果能够使用USB端口连接PC,网线接入网口或者路由器再接入开发板的方式联网,不用配置网线连接。
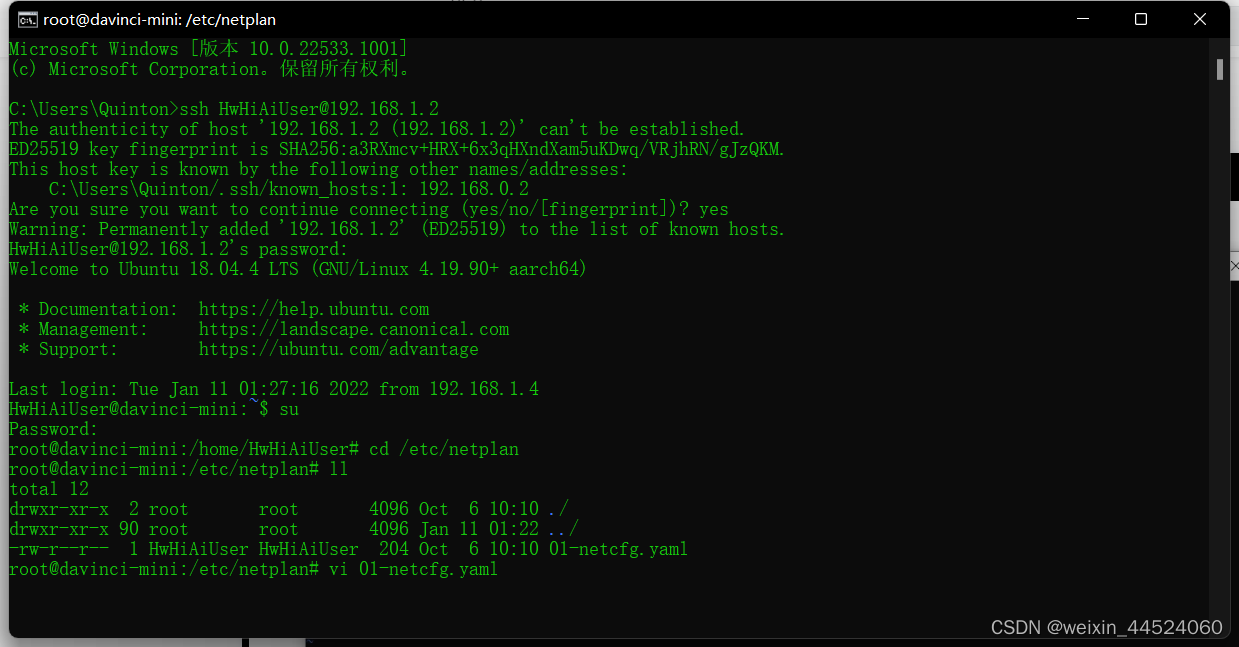
- 连接开发板,输入su,然后回车,进入root模式,密码为MInd@123,注意输入密码时页面并不会出现字符
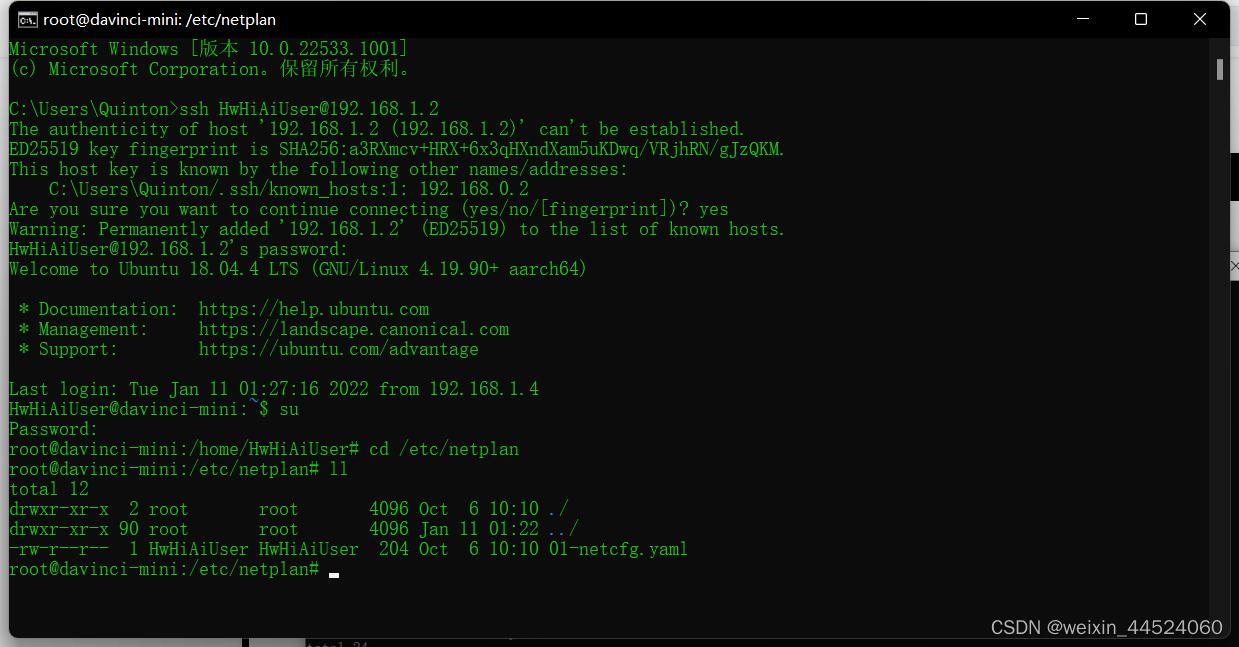
- 执行cd命令进入netplan文件夹,并查看文件夹下文件
cd /etc/netplan #进入netplan文件夹
ll #查看文件夹下文件
- 使用vi命令打开网络配置文件
vi 01-netcfg.yaml
- 在网络配置文件中设置好网线连接的参数,将dhcp4设置为no,设置ip以及网关gateway4,网关可以设置为192.168.0.X,X为0~255中除了2的任何一个数字,后面步骤中也要使用这个网关配置PC端上的网络适配器,然后保存退出
network:version: 2
# renderer: NetworkManagerrenderer: networkdethernets:eth0:dhcp4: yesaddresses: [192.168.0.2/24]gateway4: 192.168.0.100 #可以设置为192.168.0.X,X为0~255中除了2的任何一个数字nameservers:addresses: [8.8.8.8]addresses: [114.114.114.114]usb0:dhcp4: noaddresses: [192.168.1.2/24]gateway4: 192.168.0.1nameservers:addresses: [114.114.114.11]使用vi进入yaml文件后,按字母”i“键进入插入编辑模式,编辑完成后按”Esc“退出编辑模式,输入冒号”:",然后输入“wq!”,回车,成功保存退出
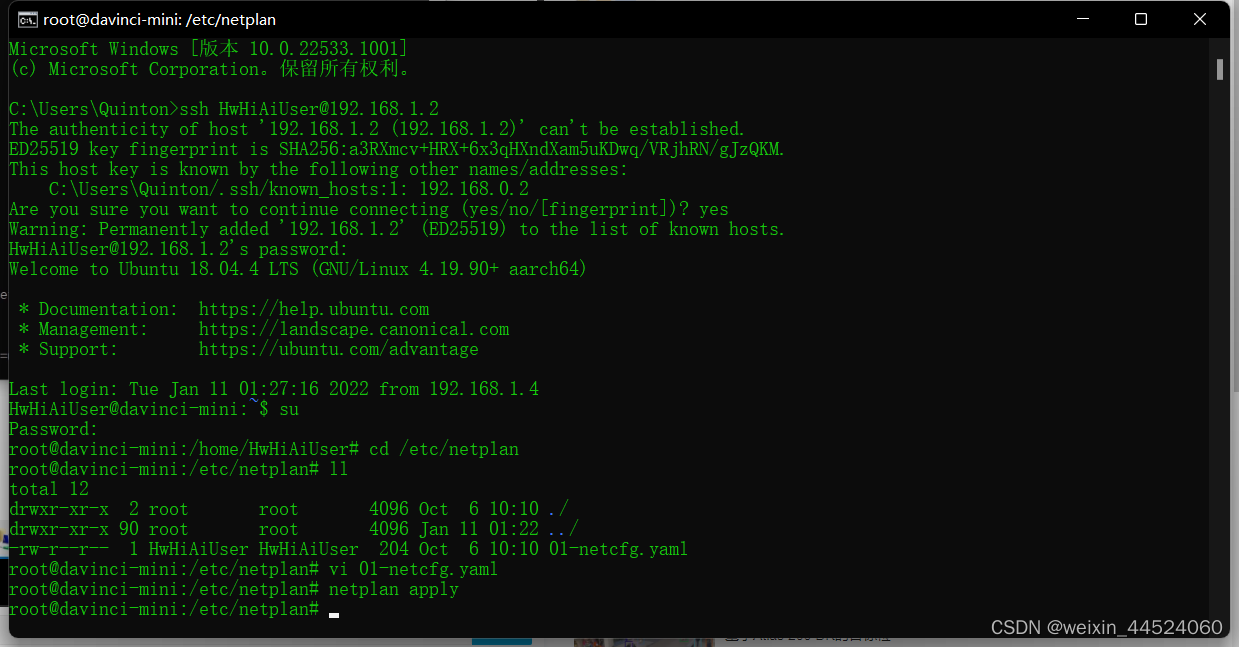
- 使设置的网络参数生效,使用此命令:
netplan apply
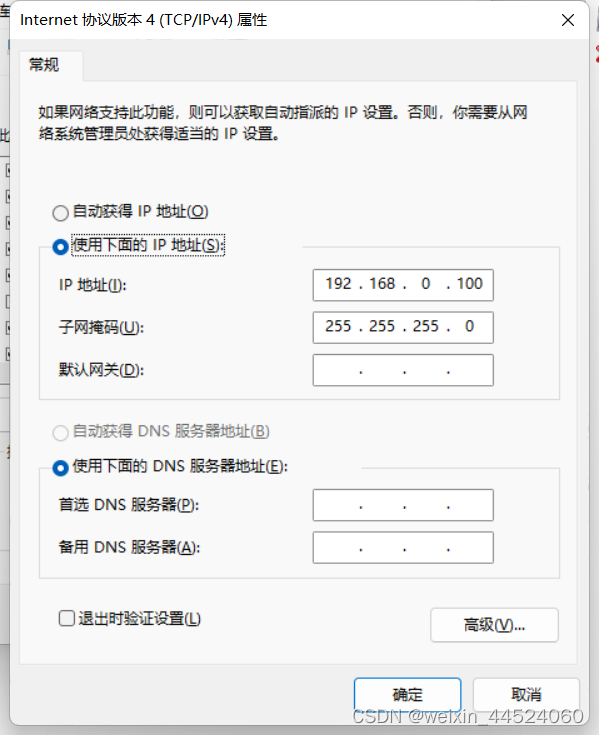
- 进入网络和Internet->高级网络设置->更多网络适配器选项,确定好网口的网络适配器(这里已经重命名为网口驱动)拔插USB和网线,观察哪个适配器消失,可以确定对应的网络适配器

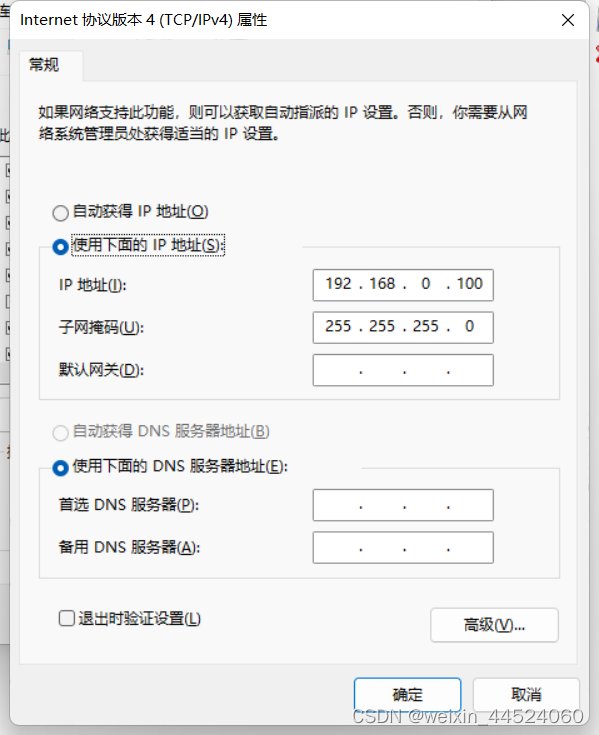
- 进入ipv4设置页面,将ip地址设置为在开发板中设置的gateway4,或者设置为192.168.1.X,X为0~255除了2以外的数字,确定 如果设置为gateway4相同,便于开发板使用共享网络的方式进行联网
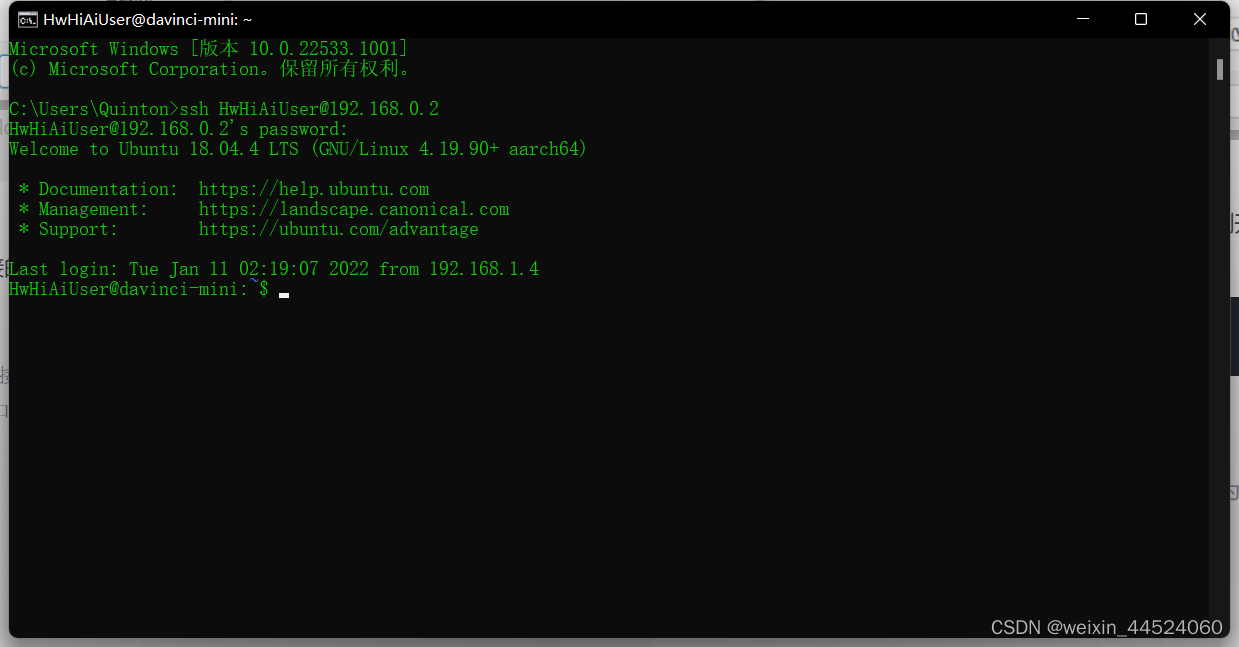
打开终端,输入:
ssh HwHiAiUser@192.168.0.2
成功通过网线连接Atlas200dk
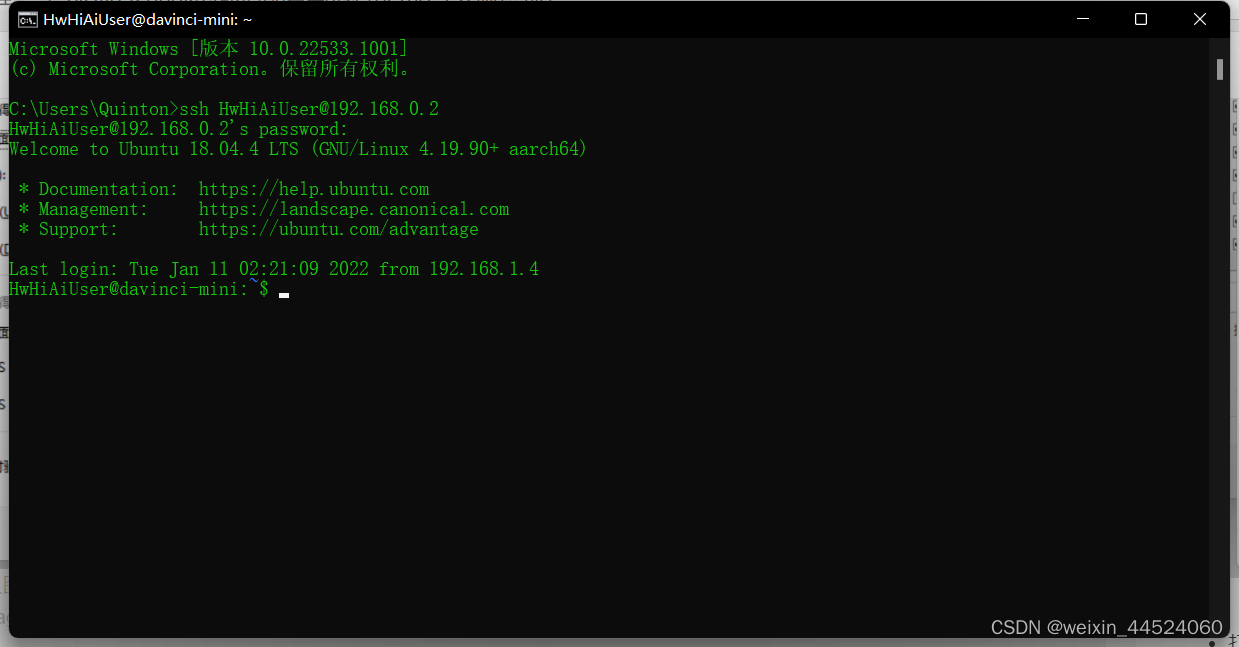
通过网线连接成功后,可以将USB线拔掉
4.通过网络共享方式接入互联网
- 首先按照前面步骤,设置好网线连接开发板,确定对应网络适配器ipv4协议的ip地址设置为在开发板中设置的gateway4本文在开发板中配置eth0下gateway4为192.168.0.100,所以ip地址设置为相同的192.168.0.100
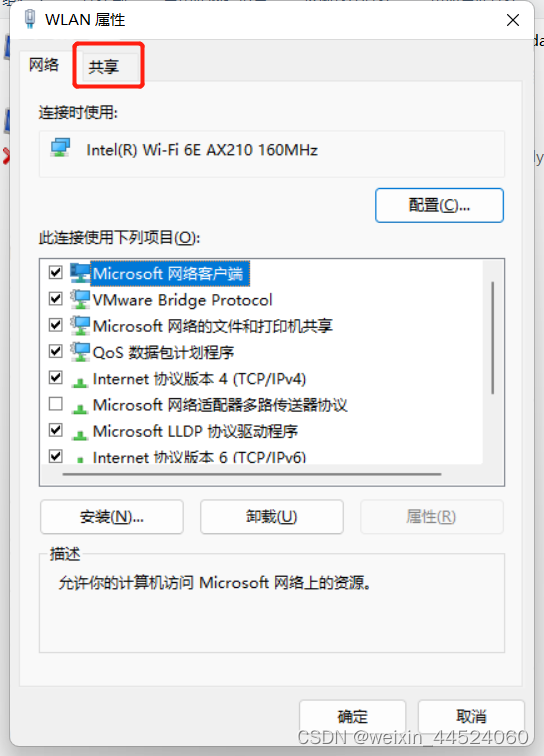
- 打开已接入网络的WLAN或者本地连接,点击共享
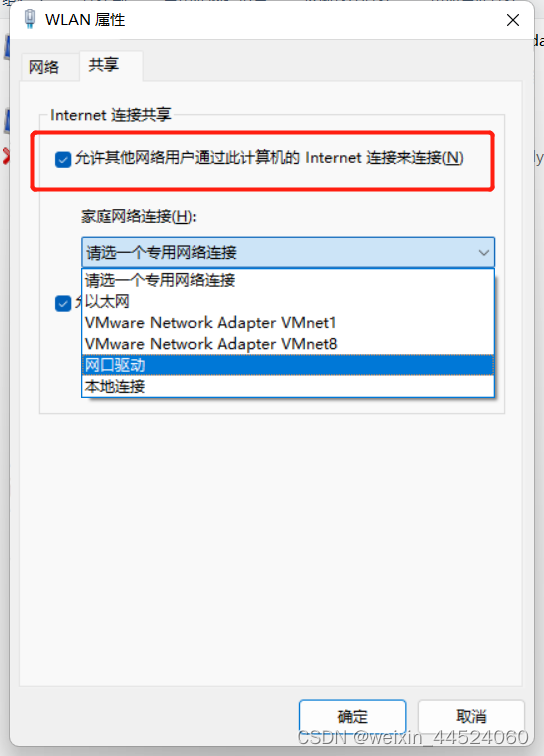
- 选择“允许其他网路用户通过此计算机的Internet连接来连接”,选择好对应的网络适配器,确定
- 选择“是”
- 此时对应的网口驱动网络适配器会重置,回到网口驱动的属性页,再次将ipv4协议的ip地址设置为在开发板中设置的gateway4,确定
- 打开终端,使用USB或者网线连接的默认ip连接到开发板
ssh HwHiAiUser@192.168.0.2 #网线连接默认ip
ssh HwHiAiUser@192.168.1.2 #USB端口连接默认ip
这里使用网线连接,配置好后可以只使用网线
-
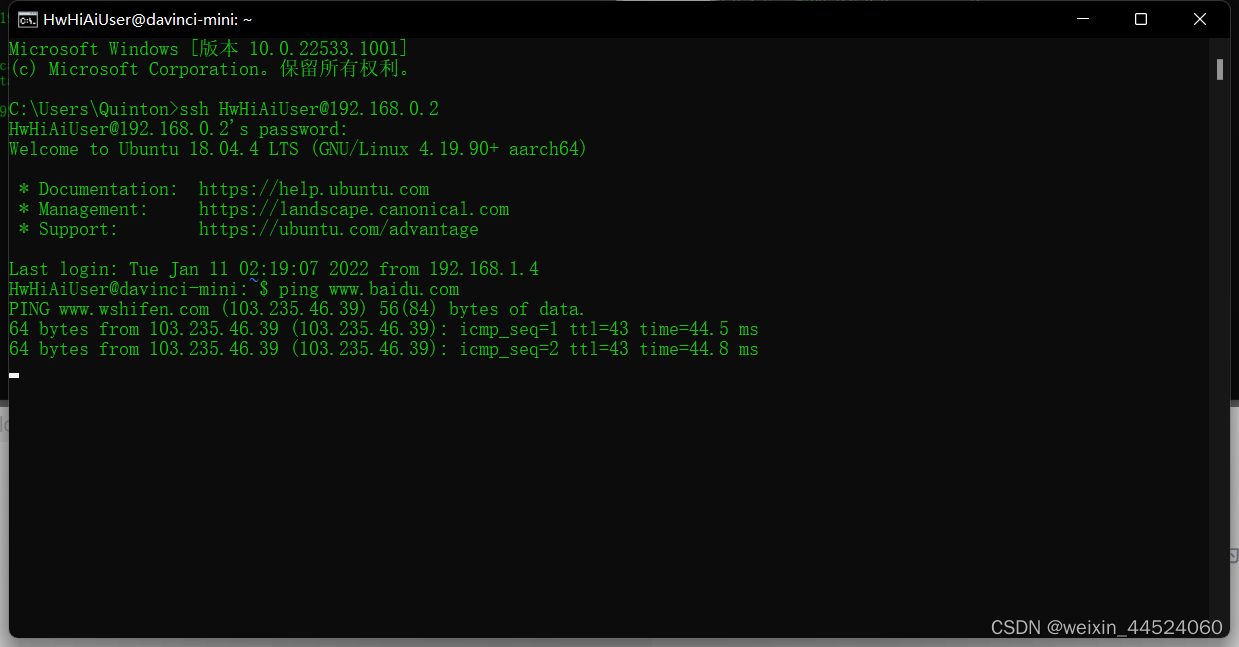
ping百度测试网络连接,开发板成功联网
ping www.baidu.com
如果按照步骤不能连接网络,是因为网络环境变化,再次进行一次操作,首先把wifi共享关掉,这时网口驱动会重置。再次开启wifi共享给网口驱动,将分配给网口驱动的IP改成eth0 gateway4的,就联网成功了
三、和设环境下运行官方例程
1、安装依赖
执行以下命令进行安装准备
建议使用MobaXterm
# 以安装用户在任意目录下执行以下命令,打开.bashrc文件。
vi ~/.bashrc # 如果.bashrc中没有对应内容,在文件最后一行后面添加如下内容,设置必要的环境变量。
export CPU_ARCH=`arch`
export THIRDPART_PATH=${HOME}/Ascend/thirdpart/${CPU_ARCH} #代码编译时链接第三方库
export LD_LIBRARY_PATH=${HOME}/Ascend/thirdpart/${CPU_ARCH}/lib:$LD_LIBRARY_PATH #运行时链接库文件
export INSTALL_DIR=${HOME}/Ascend/ascend-toolkit/latest #CANN软件安装后文件存储路径
#注意!!:latest需要按实际情况更改!不做修改会导致acllite库的编译报错# 执行命令保存文件并退出。
:wq! # 执行命令使其立即生效。
source ~/.bashrc # 创建第三方依赖文件夹
mkdir -p ${THIRDPART_PATH}# 返回主目录安装git并下载官方示例源码
cd ${HOME}
sudo apt-get install git
git clone https://gitee.com/ascend/samples.git# 拷贝公共文件到第三方路径中
cp -r ${HOME}/samples/common ${THIRDPART_PATH}#安装opencv
sudo apt-get install libopencv-dev#安装ffmpeg+acllite库
# 下载ffmpeg并解压
cd ${HOME}
wget http://www.ffmpeg.org/releases/ffmpeg-4.1.3.tar.gz --no-check-certificate
tar -zxvf ffmpeg-4.1.3.tar.gz
cd ffmpeg-4.1.3# 安装ffmpeg
#./configure配置安装会稍微需要一点时间,耐心等待
./configure --enable-shared --enable-pic --enable-static --disable-x86asm --prefix=${THIRDPART_PATH}
make -j8
make install# 编译并安装acllite
cd ${HOME}/samples/cplusplus/common/acllite/
make -j8 #使用-j8调用cpu的多个核心,加快编译
make install#安装presentagent
# 安装protobuf相关依赖
sudo apt-get install autoconf automake libtool# 下载protobuf源码
cd ${HOME}
git clone -b 3.13.x https://gitee.com/mirrors/protobufsource.git protobuf
git clone https://gitee.com/mirrors/googletest.git protobuf/third_party/googletest
git clone https://gitee.com/mirrors/google-benchmark.git protobuf/third_party/benchmark# 编译安装protobuf
cd protobuf
./autogen.sh
./configure --prefix=${THIRDPART_PATH} --disable-shared
make clean
make -j8
sudo make install# 进入presentagent源码目录并编译
cd ${HOME}/samples/cplusplus/common/presenteragent/proto
${THIRDPART_PATH}/bin/protoc presenter_message.proto --cpp_out=./# 开始编译presentagnet
cd ..
make -j8
make install2、运行华为官方例程 YOLOV3_coco_detection_video
运行华为官方例程 YOLOV3_coco_detection_video
#为了方便下载,在这里直接给出原始模型下载及模型转换命令,可以直接拷贝执行。也可以参照上表在modelzoo中下载并手工转换,以了解更多细节。 cd ${HOME}/samples/cplusplus/level2_simple_inference/2_object_detection/YOLOV3_coco_detection_video/model
wget https://modelzoo-train-atc.obs.cn-north-4.myhuaweicloud.com/003_Atc_Models/AE/ATC%20Model/Yolov3/yolov3.caffemodel
wget https://modelzoo-train-atc.obs.cn-north-4.myhuaweicloud.com/003_Atc_Models/AE/ATC%20Model/Yolov3/yolov3.prototxt
wget https://c7xcode.obs.cn-north-4.myhuaweicloud.com/models/YOLOV3_coco_detection_video/aipp_bgr.cfg
atc --model=./yolov3.prototxt --weight=./yolov3.caffemodel --framework=0 --output=yolov3 --soc_version=Ascend310 --insert_op_conf=./aipp_bgr.cfg
执行以下命令,执行编译脚本,开始样例编译。
cd ${HOME}/samples/cplusplus/level2_simple_inference/2_object_detection/YOLOV3_coco_detection_video/scripts bash sample_build.sh
#执行运行脚本,开始样例运行。
bash sample_run.sh
查看结果
打开presentserver网页界面。
使用产品为200DK开发者板。
打开启动Presenter Server服务时提示的URL即可。
使用产品为300加速卡(ai1s云端推理环境)。
以300加速卡(ai1s)内网ip为192.168.0.194,公网ip为124.70.8.192举例说明。
启动Presenter Server服务时提示为Please visit http://192.168.0.194:7009 for display server。
只需要将URL中的内网ip:192.168.0.194替换为公网ip:124.70.8.192,则URL为 http://124.70.8.192:7009。
然后在windows下的浏览器中打开URL即可。
等待Presenter Agent传输数据给服务端,单击“Refresh“刷新,当有数据时相应的Channel 的Status变成绿色。
单击右侧对应的View Name链接,查看结果。
2、运行华为官方例程 FairMOT多目标轨迹检测
这篇关于Atlas 200DK和设环境下跑通华为官方例程 YOLOV3_coco_detection_video和FairMOT多目标轨迹检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









