本文主要是介绍C/C++利用迪杰斯特拉最短路径算法,求解千万结点道路网最短路径,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
《算法导论》dijkstra算法的图,怎么图是歪的?顺便治疗一下颈椎病,嘎嘎!
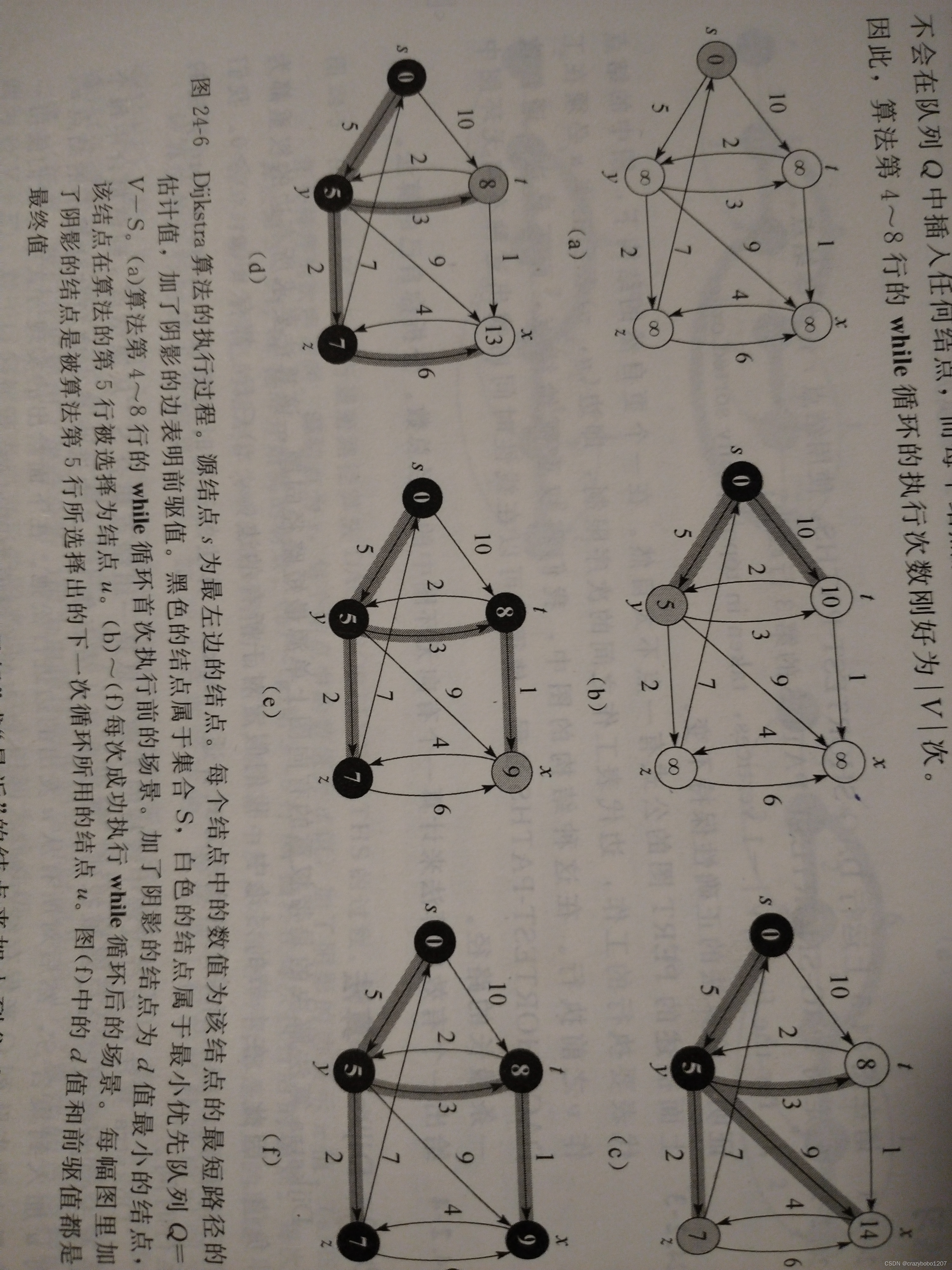
计算机程序很笨,一开始它看不到整个图,只能从起点开始,慢慢的探索周围的点,由近及远,所以它是一个广度优先搜索。
很自然的,程序刚开始,要把所有点的distance值(从起点到该点的距离)设置为无穷大,意味所有点都是不可达的状态。 然后,我们要把起点的distance值设置为0。接下来,程序进入循环,循环里面做3件事:
(1)从当前集合里找到distance值最小的点,准备进行处理。
(2)更新这个点的所有邻接点的distance值,更新的条件是什么呢?假设这个点是A点,它的distance值是50(从起点到A点的距离值是50),它有一个邻接点是B点,此前B点的distance值是100(从起点到B点的距离值是100),又假设A到B的距离只有10,那么我们发现:经过A到达B,有一条比之前100更短的路径,即50+10=60,这时候将B的distance值更新为60,意味着我们找到了一条从起点到达B点的更短的路径。(将这个点的邻接点放入集合,这一个操作要不要,取决于集合是怎么定义的)
(3)将这个处理过的A点从集合中删除。
这个算法有两个关键的事情:一是这个集合里的点的个数是如何增减的,二是如何在这个集合里找到distance值最小的点。
做到这两件事不难,但是要保证程序运行效率,需要考虑一些事。
第一,找最小值,用什么方法?所有数据排序?这种排序的目的是“让全体数据有序”,但实际上我们不需要这种“有序”,我们只需要找到那个最小的值就行。用遍历一遍的方法,找到最小值?效率还是低了。最后我们用小根堆来找到最小值,C++里可以自己建堆、调整堆,但是,可以直接用优先队列,速度还要快一点,优先队列它也是用堆实现的。
第二,集合如何定义?这个集合里装的是未处理过的结点,还是待处理的结点?这两者是有区别的。
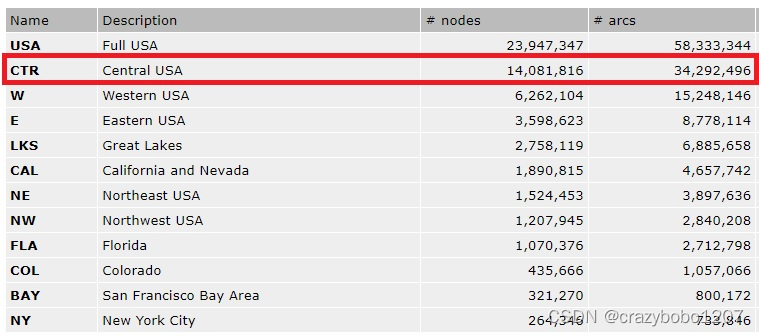
下面使用老美网站上的一个数据集来测试最短路径程序。网址是:9th DIMACS Implementation Challenge: Shortest Paths
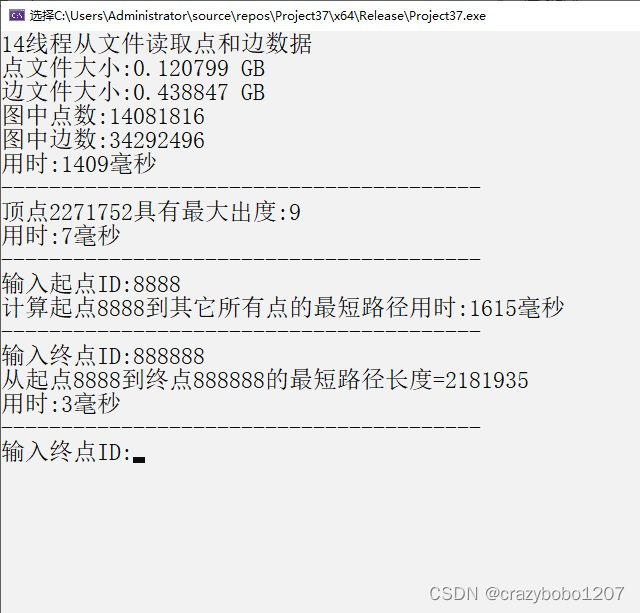
直接使用比较大的道路数据集,1400多万结点,3400多万条边。
先用C++的map,将原始的边数据转为邻接矩阵(这个代码略),而且分多个文件存储,回头可以多线程读取文件,加快文件读取速度,点的数据也分为多个文件存储。
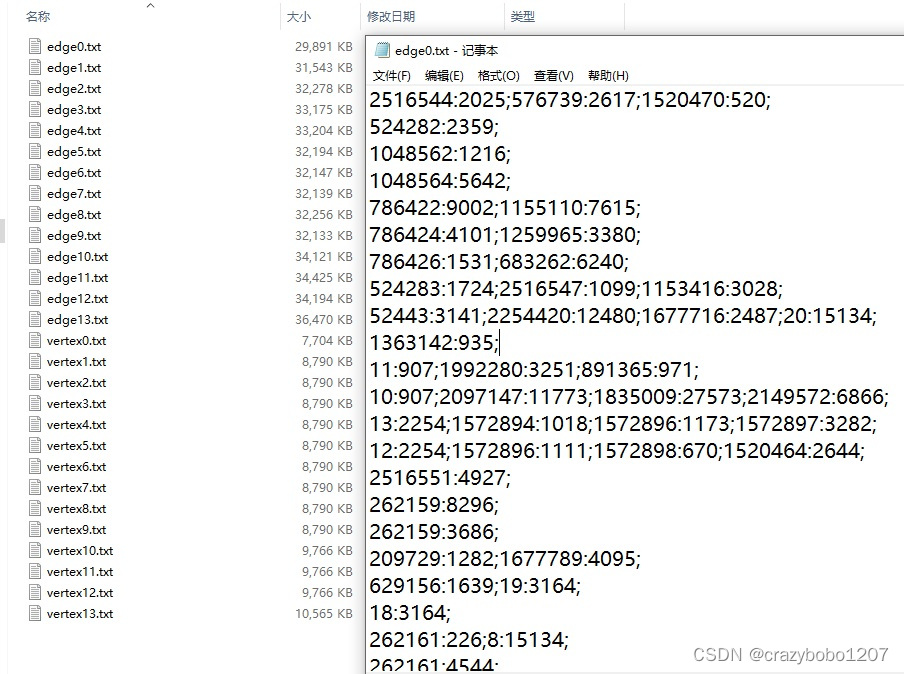
上图数据的解释:从点0到点2516544有一条路径,长度是2025米,从点0到点576739有一条路径,长度是2617米,从点0到点1520470有一条路径,长度是520,也就是说从点0出去有3条路径;然后,从点1到点524282有一条路径,长度是2359……
程序运行结果,读文件到内存1.4秒,找到一个点到其它1400多万个点的最短路径,大概用时1.6秒:
路径有点长,所以保存在一个path.txt文件中:

代码如下:
#include <vector>
#include <queue>
#include <thread>
#include <limits>
#include <iostream>
using namespace std;#define THREADNUM 14
#define PINFINITY INT_MAXclass CVertex
{
public:int id;int distance; //从源点到该点的距离int parent; //记录最短路径经过的结点public:CVertex(int _id = -1, int _distance = -1, int _parent = -1){id = _id;distance = _distance;parent = _parent;}void operator=(const CVertex& vertex){id = vertex.id;distance = vertex.distance;parent = vertex.parent;}bool operator<(const CVertex& vertex){return this->distance < vertex.distance;}~CVertex(){}
};class CVexIdAndDistance
{
public:int id;int distance;public:CVexIdAndDistance(int _id = -1, int _distance = -1){id = _id;distance = _distance;}bool operator==(const CVexIdAndDistance& vexIdAndDistance){if (id == vexIdAndDistance.id && distance == vexIdAndDistance.distance){return true;}else{return false;}}~CVexIdAndDistance(){}
};class CEdge
{
public:int toVexId;int weight;public:CEdge(int _toVexId = -1, int _weight = 0){toVexId = _toVexId;weight = _weight;}
};class Cmp
{
public:bool operator() (const CVexIdAndDistance& a, const CVexIdAndDistance& b){return a.distance > b.distance;}
};int GetVertexNumThread(const char* vertexInfoFilePath, int* vertexNumPerFile, int tid);
int GetEdgeNumThread(const char* edgeInfoFilePath, int* edgeNum, int tid);
int GetVertexAndEdgeInfoThread(const char* vertexInfoFilePath, const char* edgeInfoFilePath, CVertex* vertex, CEdge** edge, int tid);
int UpdateDistance(CVertex* vertex, priority_queue<CVexIdAndDistance, vector<CVexIdAndDistance>, Cmp>& priorityQueueForSort, const int* edgeNum, const CEdge* const* edge, int srcVexId, int dstVexId);
int GetPath(const CVertex* vertex, int srcVexId, int dstVexId);char vertexInfoFilePath[50] = "e:\\USA-road-d.Central\\vertex";
char edgeInfoFilePath[50] = "e:\\USA-road-d.Central\\edge";
int totalVertexNum = 0;
int vertexNumPerThread = 0;int main()
{clock_t c[10] = { 0 };c[0] = clock();cout << THREADNUM << "线程从文件读取点和边数据" << endl;int all_vertex_file_size = 0;long long int all_edge_file_size = 0;FILE* fp = NULL;for (int i = 0; i < THREADNUM; i++){char vertexInfoFileName[50] = "";strcat_s(vertexInfoFileName, vertexInfoFilePath);char temp[5] = "";_itoa_s(i, temp, 10);strcat_s(vertexInfoFileName, temp);strcat_s(vertexInfoFileName, ".txt");fopen_s(&fp, vertexInfoFileName, "rb");if (fp == NULL)return -1;_fseeki64(fp, 0, SEEK_END);long long int filesize = _ftelli64(fp);all_vertex_file_size += filesize;if (fp != NULL)fclose(fp);char edgeInfoFileName[50] = "";strcat_s(edgeInfoFileName, edgeInfoFilePath);_itoa_s(i, temp, 10);strcat_s(edgeInfoFileName, temp);strcat_s(edgeInfoFileName, ".txt");fopen_s(&fp, edgeInfoFileName, "rb");if (fp == NULL)return -1;_fseeki64(fp, 0, SEEK_END);filesize = _ftelli64(fp);all_edge_file_size += filesize;if (fp != NULL)fclose(fp);}cout << "点文件大小:" << all_vertex_file_size / 1024.0 / 1024 / 1024 << " GB" << endl;cout << "边文件大小:" << all_edge_file_size / 1024.0 / 1024 / 1024 << " GB" << endl;int vertexNumPerFile[THREADNUM] = { 0 };thread td0[THREADNUM];for (int i = 0; i < THREADNUM; i++){td0[i] = thread(&GetVertexNumThread, vertexInfoFilePath, vertexNumPerFile, i);}for (int i = 0; i < THREADNUM; i++){td0[i].join();}for (int i = 0; i < THREADNUM; i++){totalVertexNum += vertexNumPerFile[i];}vertexNumPerThread = int((totalVertexNum / 1000000) / THREADNUM) * 1000000;CVertex* vertex = new CVertex[totalVertexNum];int* edgeNum = new int[totalVertexNum];memset(edgeNum, -1, totalVertexNum);int totalEdgeNum = 0;int srcVexId = -1, dstVexId = -1;thread td1[THREADNUM];for (int i = 0; i < THREADNUM; i++){td1[i] = thread(&GetEdgeNumThread, edgeInfoFilePath, edgeNum, i);}for (int i = 0; i < THREADNUM; i++){td1[i].join();}for (int i = 0; i < totalVertexNum; i++){totalEdgeNum += edgeNum[i];}CEdge** edge = new CEdge * [totalVertexNum];if (edge == NULL){return -1;}for (int i = 0; i < totalVertexNum; i++){edge[i] = NULL;}for (int i = 0; i < totalVertexNum; i++){if (edgeNum[i] != 0){edge[i] = new CEdge[edgeNum[i]];if (edge[i] == NULL){return -1;}}elseedge[i] = NULL;}thread td2[THREADNUM];for (int i = 0; i < THREADNUM; i++){td2[i] = thread(&GetVertexAndEdgeInfoThread, vertexInfoFilePath, edgeInfoFilePath, vertex, edge, i);}for (int i = 0; i < THREADNUM; i++){td2[i].join();}cout << "图中点数:" << totalVertexNum << endl;cout << "图中边数:" << totalEdgeNum << endl;c[1] = clock();cout << "用时:" << c[1] - c[0] << "毫秒" << endl;cout << "----------------------------------------" << endl;c[2] = clock();int maxOutDegree = 0;int imax = 0;for (int i = 0; i < totalVertexNum; i++){if (edgeNum[i] > maxOutDegree){maxOutDegree = edgeNum[i];imax = i;}}cout << "顶点" << imax << "具有最大出度:" << maxOutDegree << endl;c[3] = clock();cout << "用时:" << c[3] - c[2] << "毫秒" << endl;cout << "----------------------------------------" << endl;cout << "输入起点ID:";cin >> srcVexId;c[4] = clock();vertex[srcVexId].distance = 0;priority_queue<CVexIdAndDistance, vector<CVexIdAndDistance>, Cmp> priorityQueueForSort;priorityQueueForSort.push(CVexIdAndDistance(srcVexId, 0));UpdateDistance(vertex, priorityQueueForSort, edgeNum, edge, srcVexId, dstVexId);c[5] = clock();cout << "计算起点" << srcVexId << "到其它所有点的最短路径用时:" << c[5] - c[4] << "毫秒" << endl;cout << "----------------------------------------" << endl;while (true){cout << "输入终点ID:";cin >> dstVexId;if (dstVexId == -1){break;}c[6] = clock();GetPath(vertex, srcVexId, dstVexId);c[7] = clock();cout << "用时:" << c[7] - c[6] << "毫秒" << endl;cout << "----------------------------------------" << endl;}return 0;
}int GetVertexNumThread(const char* vertexInfoFilePath, int* vertexNumPerFile, int tid)
{char vertexInfoFileName[50] = "";strcat_s(vertexInfoFileName, vertexInfoFilePath);char temp[5] = "";_itoa_s(tid, temp, 10);strcat_s(vertexInfoFileName, temp);strcat_s(vertexInfoFileName, ".txt");FILE* fp;fopen_s(&fp, vertexInfoFileName, "rb");if (fp == NULL)return -1;char* line = new char[100];while (!feof(fp)){fgets(line, 100, fp);vertexNumPerFile[tid]++;}
}int GetEdgeNumThread(const char* edgeInfoFilePath, int* edgeNum, int tid)
{char edgeInfoFileName[50] = "";strcat_s(edgeInfoFileName, edgeInfoFilePath);char temp[5] = "";_itoa_s(tid, temp, 10);strcat_s(edgeInfoFileName, temp);strcat_s(edgeInfoFileName, ".txt");FILE* fp = NULL;fopen_s(&fp, edgeInfoFileName, "r");if (fp == NULL)return -1;char* line = new char[totalVertexNum * 2];int i, j;int lineIndex = 0;int tokenIndex = 0;while (!feof(fp)){fgets(line, totalVertexNum * 2, fp);tokenIndex = 0;i = 0;while (line[i] != '\0'){if (line[i] >= '0' && line[i] <= '9'){j = 0;while (line[i] >= '0' && line[i] <= '9'){i++;}tokenIndex++;}else{i++;}}edgeNum[vertexNumPerThread * tid + lineIndex] = tokenIndex / 2;lineIndex++;}
}int GetVertexAndEdgeInfoThread(const char* vertexInfoFilePath, const char* edgeInfoFilePath, CVertex* vertex, CEdge** edge, int tid)
{char vertexInfoFileName[50] = "";strcat_s(vertexInfoFileName, vertexInfoFilePath);char temp[5] = "";_itoa_s(tid, temp, 10);strcat_s(vertexInfoFileName, temp);strcat_s(vertexInfoFileName, ".txt");FILE* fp = NULL;fopen_s(&fp, vertexInfoFileName, "rb");if (fp == NULL)return -1;char* line = new char[totalVertexNum * 2];char t[50];int tokenIndex = 0;while (!feof(fp)){fgets(line, totalVertexNum * 2, fp);int i = 0;int j;while (line[i] != '\0'){if (line[i] >= '0' && line[i] <= '9'){j = 0;while (line[i] >= '0' && line[i] <= '9'){t[j++] = line[i++];}t[j] = '\0';vertex[vertexNumPerThread * tid + tokenIndex].id = atoi(t);tokenIndex++;}else{i++;}}}if (tid < THREADNUM - 1){for (int i = 0; i < vertexNumPerThread; i++){vertex[vertexNumPerThread * tid + i].distance = PINFINITY;}}else{for (int i = 0; i < totalVertexNum - vertexNumPerThread * THREADNUM + vertexNumPerThread; i++){vertex[vertexNumPerThread * tid + i].distance = PINFINITY;}}if (fp != NULL)fclose(fp);char edgeInfoFileName[50] = "";strcat_s(edgeInfoFileName, edgeInfoFilePath);_itoa_s(tid, temp, 10);strcat_s(edgeInfoFileName, temp);strcat_s(edgeInfoFileName, ".txt");fopen_s(&fp, edgeInfoFileName, "rb");if (fp == NULL)return -1;int i, j;int lineIndex = 0;tokenIndex = 0;while (!feof(fp)){fgets(line, totalVertexNum * 2, fp);tokenIndex = 0;i = 0;while (line[i] != '\0'){if (line[i] >= '0' && line[i] <= '9'){j = 0;while (line[i] >= '0' && line[i] <= '9'){t[j++] = line[i++];}t[j] = '\0';if (tokenIndex % 2 == 0){edge[vertexNumPerThread * tid + lineIndex][tokenIndex / 2].toVexId = atoi(t);}else{edge[vertexNumPerThread * tid + lineIndex][tokenIndex / 2].weight = atoi(t);}tokenIndex++;}else{i++;}}lineIndex++;}if (fp != NULL)fclose(fp);return 0;
}int UpdateDistance(CVertex* vertex, priority_queue<CVexIdAndDistance, vector<CVexIdAndDistance>, Cmp>& priorityQueueForSort, const int* edgeNum, const CEdge* const* edge, int srcVexId, int dstVexId)
{CVexIdAndDistance currentVertex;vector<CVexIdAndDistance>::iterator iter;while (true){if (priorityQueueForSort.size() == 0){break;}currentVertex = priorityQueueForSort.top();priorityQueueForSort.pop();for (int i = 0; i < edgeNum[currentVertex.id]; i++){if (edgeNum[currentVertex.id] == 0){continue;}int toVexId = edge[currentVertex.id][i].toVexId;if (currentVertex.distance + edge[currentVertex.id][i].weight < vertex[toVexId].distance){vertex[toVexId].distance = currentVertex.distance + edge[currentVertex.id][i].weight;vertex[toVexId].parent = currentVertex.id;priorityQueueForSort.push(CVexIdAndDistance(toVexId, vertex[toVexId].distance));}}}return 0;
}int GetPath(const CVertex* vertex, int srcVexId, int dstVexId)
{if (vertex[dstVexId].distance == PINFINITY){cout << endl << "no path to the vertex " << dstVexId << endl;return -1;}int* path = new int[totalVertexNum];memset(path, -1, totalVertexNum);int i = 0;int tid = dstVexId;while (tid != -1){path[i++] = tid;tid = vertex[tid].parent;if (tid == srcVexId){break;}}path[i] = tid;for (int j = 0; j < (i + 1) / 2; j++){int t = path[j];path[j] = path[i - j];path[i - j] = t;}FILE* fp = NULL;fopen_s(&fp, "e:\\path.txt", "w");if (fp == NULL)return -1;cout << "从起点" << srcVexId << "到终点" << dstVexId << "的最短路径长度=" << vertex[dstVexId].distance << endl;fprintf(fp, "起点%d到终点%d的最短路径: %d\n", srcVexId, dstVexId, vertex[dstVexId].distance);fprintf(fp, "最短路径一共经过%d个顶点(包括起点和终点):\n", i + 1);for (int j = 0; j <= i; j++){fprintf(fp, "vertex id:%d\n", path[j]);}if (fp != NULL)fclose(fp);return 0;
}这篇关于C/C++利用迪杰斯特拉最短路径算法,求解千万结点道路网最短路径的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






