本文主要是介绍Routh-Hurwitz准则——判别实系数多项式有无实部非负的根的充要条件,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Routh-Hurwitz准则——判别实系数多项式有无实部非负的根的充要条件
- 一、引言
- 二、准则内容
- 三、举例说明
- 四、证明思路
- 五、证明
- 引理1
- 引理2
- ①沿着C
- ②沿着C1(C2同理,因为是对称的)
- 六、证明思路梗概
- 七、参考文献/书籍
本文为 该知乎文章搬运到CSDN的文章, 该文章作者与本文章为同一人,内容是本人原创。之所以搬运到CSDN,是因为CSDN的markdown编辑器比较好用,最关键的是文章超链接功能,因为我写的文章都比较长,没有超链接找起来很辛苦。从今往后我将经常在CSDN发文, 有时候会把部分我在知乎写的文章搬运过来。因为知乎的编辑器与CSDN的编辑器不同,所以搬运也比较麻烦,所以不定期更新。 本文在原文上有一些增补修改(增加了第三章的4、5),修改了部分错误,增加了Routh-Hurwitz准则在特殊情况下的处理方式。本文 从证明思路、细节的角度讲解Routh-Hurwitz准则,对具体应用也有一定阐述。
Routh-Hurwitz准则(R-H准则)是一个「判别系统稳定性」的重要准则,它给出了一个「判别实系数多项式有无实部非负的根」的充要条件。遗憾的是,笔者在学习这一准则时,并未在网上发现其他作者对该准则进行梳理,更没有找到该准则的证明过程(书上也未给出证明)。因此,笔者在梳理相关参考文献基础上,结合笔者自己的理解,简化了部分参考文献的思路,对该准则进行了证明和梳理。
一、引言
在系统分析中,我们往往关注系统的频率特性,即系统响应函数 h(t) 的拉普拉斯变换函数 H(s) 。常见的 H(s) 往往是「多项式除以多项式」型的,即分子分母都是实系数多项式。我们期望我们的系统是一个稳定的系统,即有界输入对应有界输出(BIBO)。而我们知道:「系统的稳定性问题」等价于「系统函数 H(s) 的极点 p_k 是否在左半平面1」。而R-H准则给了我们判别之的一个充要条件 。至于这个充要条件具体是什么,请读者继续看后文内容。
举一个简单的例子: H ( s ) = s 2 + 3 s + 3 s 3 + 3 s 2 + 4 s + 2 = 1 s + 1 + 1 s 2 + 2 s + 2 \displaystyle H(s)=\frac{s^2+3s+3}{s^3+3s^2+4s+2}=\frac1{s+1}+\frac1{s^2+2s+2} H(s)=s3+3s2+4s+2s2+3s+3=s+11+s2+2s+21,这个信号对应的时域响应(拉普拉斯反变换)为 f ( t ) = e − t + e − t sin t f(t)=\mathrm e^{-t}+\mathrm e^{-t}\sin t f(t)=e−t+e−tsint ,因为有一个「指数衰减因子」 e − t \mathrm e^{-t} e−t,这个信号自然衰减得很快。因此,这个系统是一个稳定系统。
而我们注意到, H(s) 的极点的实部均为-1,这也是 f(t) 的「指数衰减因子」 e − 1 ⋅ t \mathrm e^{-1\cdot t} e−1⋅t 为-1的原因。推而广之,极点的实部充分必要地决定了其拉普拉斯反变换函数的「指数衰减因子」的系数,这也自然充分必要地决定了系统地稳定性。
而极点的实部判别又可以充分必要地通过「R-H准则」进行,这也是「R-H准则」的实际应用所在。
二、准则内容
对于一个多项式 p ( s ) = a n s n + a n − 1 s n − 1 + ⋯ + a 1 s + a 0 p(s)=a_ns^n+a_{n-1}s^{n-1}+\cdots+a_1s+a_0 p(s)=ansn+an−1sn−1+⋯+a1s+a0
不妨设 a n > 0 a_n>0 an>0 ,接下来,让我们构造一个被称为「Rouch表」的东西,我们可以断言——「多项式 p ( s ) p(s) p(s) 所有零点都位于左半平面」等价于「Rouch表首列元素都为正」(如果不是,那么符号改变的次数即为右半平面根的个数)。
为了便于实际应用,在这里我将「Rouch表」进行了一个变形 。在后续证明过程中,我们使用的是另一种形式的「Rouch表」,我们只需要知道它们两个是一个东西就行了。
①如果n为偶数,则我们称下表为 p ( s ) p(s) p(s) 的Rouch表
a n a n − 2 a n − 4 ⋯ a 4 a 2 a 0 a n − 1 a n − 3 a n − 5 ⋯ a 3 a 1 a − 1 c n − 1 c n − 3 c n − 5 ⋯ c 3 c 1 d n − 1 d n − 3 d n − 5 ⋯ d 3 d 1 ⋮ u n − 1 u n − 3 u n − 1 u n − 3 v n − 1 } n + 1 行 (2.1) \left. \begin{array}{lllclll} a_n&a_{n-2}&a_{n-4}&\cdots&a_4&a_2&a_0\\ a_{n-1}&a_{n-3}&a_{n-5}&\cdots&a_3&a_1&a_{-1}\\ c_{n-1}&c_{n-3}&c_{n-5}&\cdots&c_3&c_1\\ d_{n-1}&d_{n-3}&d_{n-5}&\cdots&d_3&d_1\\ \vdots&&&&&\\ u_{n-1}&u_{n-3}&&&&\\ u_{n-1}&u_{n-3}&&&&\\ v_{n-1}&&&&&\\ \end{array} \right\}n+1行\tag{2.1} anan−1cn−1dn−1⋮un−1un−1vn−1an−2an−3cn−3dn−3un−3un−3an−4an−5cn−5dn−5⋯⋯⋯⋯a4a3c3d3a2a1c1d1a0a−1⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫n+1行(2.1)
其中 a n , a n − 1 , ⋯ , a 1 , a 0 a_n,a_{n-1},\cdots,a_1,a_0 an,an−1,⋯,a1,a0 与多项式 p ( s ) p(s) p(s) 系数相同, a − 1 a_{-1} a−1 为人为补的0。
并且系数有(其余以此类推):
c n − 1 = − ∣ a n a n − 2 a n − 1 a n − 3 ∣ a n − 1 \displaystyle c_{n-1}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-2}\\ a_{n-1}&a_{n-3} \end{array} \right| }{a_{n-1}} cn−1=an−1−∣∣∣∣anan−1an−2an−3∣∣∣∣ , c n − 3 = − ∣ a n a n − 4 a n − 1 a n − 5 ∣ a n − 1 \displaystyle c_{n-3}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-4}\\ a_{n-1}&a_{n-5} \end{array} \right| }{a_{n-1}} cn−3=an−1−∣∣∣∣anan−1an−4an−5∣∣∣∣
d n − 1 = − ∣ a n − 1 a n − 3 c n − 1 c n − 3 ∣ c n − 1 \displaystyle d_{n-1}=\frac{- \left| \begin{array}{ll} a_{n-1}&a_{n-3}\\ c_{n-1}&c_{n-3} \end{array} \right| }{c_{n-1}} dn−1=cn−1−∣∣∣∣an−1cn−1an−3cn−3∣∣∣∣ , d n − 3 = − ∣ a n − 1 a n − 5 c n − 1 c n − 5 ∣ c n − 1 \displaystyle d_{n-3}=\frac{- \left| \begin{array}{ll} a_{n-1}&a_{n-5}\\ c_{n-1}&c_{n-5} \end{array} \right| }{c_{n-1}} dn−3=cn−1−∣∣∣∣an−1cn−1an−5cn−5∣∣∣∣
②如果n为奇数,则我们称下表为 p ( s ) p(s) p(s) 的Rouch表
a n a n − 2 a n − 4 ⋯ a 5 a 3 a 1 a − 1 a n − 1 a n − 3 a n − 5 ⋯ a 4 a 2 a 0 a − 2 c n − 1 c n − 3 c n − 5 ⋯ c 4 c 2 c 0 d n − 1 d n − 3 d n − 5 ⋯ d 4 d 2 d 0 ⋮ u n − 1 u n − 3 u n − 1 u n − 3 } n + 1 行 (2.2) \left. \begin{array}{lllcllll} a_n&a_{n-2}&a_{n-4}&\cdots&a_5&a_3&a_1&a_{-1}\\ a_{n-1}&a_{n-3}&a_{n-5}&\cdots&a_4&a_2&a_{0}&a_{-2}\\ c_{n-1}&c_{n-3}&c_{n-5}&\cdots&c_4&c_2&c_0\\ d_{n-1}&d_{n-3}&d_{n-5}&\cdots&d_4&d_2&d_0\\ \vdots&&&&&&\\ u_{n-1}&u_{n-3}&&&&&\\ u_{n-1}&u_{n-3}&&&&&\\ \end{array} \right\}n+1行\tag{2.2} anan−1cn−1dn−1⋮un−1un−1an−2an−3cn−3dn−3un−3un−3an−4an−5cn−5dn−5⋯⋯⋯⋯a5a4c4d4a3a2c2d2a1a0c0d0a−1a−2⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫n+1行(2.2)
除了 a − 1 a_{-1} a−1, a − 2 = 0 a_{-2}=0 a−2=0 进行补0以外,其余系数关系与n为偶数情形是相一致的。
三、举例说明
前面的内容较为抽象,下面举几个具体例子,让大家直观感受一下「R-H准则」的使用方式。
1、设某系统的系统函数为 H ( s ) = A s 2 + B s + C s 3 + s 2 + 2 s + 8 \displaystyle H(s)=\frac{As^2+Bs+C}{s^3+s^2+2s+8} H(s)=s3+s2+2s+8As2+Bs+C (A、B、C均为实常数),用「R-H准则」判断该系统是否稳定。
解:
显然:「系统稳定」等价于「 H(s) 极点全在左半平面」等价于「分母多项式零点全位于左半平面」,故对分母多项式采用「R-H准则」判别。
列出「Rouch表」如下:
1 2 0 1 8 0 − 6 0 8 0 \begin{array}{rrr} 1&2&0\\ 1&8&0\\-6&0&\\8&0 \end{array} 11−68280000
显然,「Rouch表」第一列元素为 1 → 1 → − 6 → 8 1\to1\to-6\to8 1→1→−6→8 ,有两次改变符号,则分母多项式有两个右半平面零点,显然系统不稳定。
2、判别多项式 f ( x ) = x 4 + 2 x 3 + 3 x 2 + 4 x + 5 f(x)=x^4+2x^3+3x^2+4x+5 f(x)=x4+2x3+3x2+4x+5 的零点分布情况
解:
列出「Rouch表」如下:
1 3 5 0 2 4 0 0 1 5 0 − 6 0 0 5 0 \begin{array}{rrr} 1&3&5&0\\ 2&4&0&0\\ 1&5&0\\ -6&0&0\\ 5&0 \end{array} 121−6534500500000
显然,「Rouch表」第一列元素为 1 → 2 → 1 → − 6 → 5 1\to2\to1\to-6\to5 1→2→1→−6→5 ,有两次改变符号,则多项式有两个右半平面零点。
3、判别多项式 f ( x ) = x 3 + 2 x 2 + 2 x + 1 f(x)=x^3+2x^2+2x+1 f(x)=x3+2x2+2x+1 的零点分布情况
解:
列出「Rouch表」如下:
1 2 0 2 1 0 3 2 0 1 0 \begin{array}{ccc} 1&2&0\\ 2&1&0\\ \frac32&0\\ 1&0\\ \end{array} 12231210000
显然,「Rouch表」第一列元素为 1 → 2 → 3 2 → 1 1\to2\to\frac32\to1 1→2→23→1 ,未改变符号,则多项式零点全在左半平面。
特殊情况1:某行出现分母为0
解决方案:把f(x)乘以(x+1)
4、判别多项式 f ( x ) = x 3 + 2 x + 1 f(x)=x^3+2x+1 f(x)=x3+2x+1 的零点分布情况
先列出Routh表前2行:
1 2 0 0 1 0 \begin{array}{ccc} 1&2&0\\ 0&1&0\end{array} 102100
注意到:3行1列出现分母为0,Routh准则失效
为了解决这一问题,采用一个技巧:把f(x)乘以(x+1)
即:构造出 g ( x ) = ( x + 1 ) ( x 3 + 2 x + 1 ) = x 4 + x 3 + 2 x 2 + 3 x + 1 g(x)=(x+1)(x^3+2x+1)=x^4+x^3+2x^2+3x+1 g(x)=(x+1)(x3+2x+1)=x4+x3+2x2+3x+1
解:
列出「Rouch表」如下:
1 2 1 0 1 3 0 0 − 1 − 1 0 2 0 0 1 0 \begin{array}{rrr} 1&2&1&0\\ 1&3&0&0\\ -1&-1&0\\ 2&0&0\\ 1&0 \end{array} 11−12123−100100000
显然,「Rouch表」第一列元素为 1 → 1 → − 1 → 2 → 1 1\to1\to-1\to2\to1 1→1→−1→2→1 ,有两次改变符号,则多项式有两个右半平面零点。
特殊情况2:出现全零行
解决方案:构造偶次多项式
5、判别多项式 f ( x ) = x 6 + x 5 − 2 x 4 − 3 x 3 − 7 x 2 − 4 x − 4 f(x)=x^6+x^5-2x^4-3x^3-7x^2-4x-4 f(x)=x6+x5−2x4−3x3−7x2−4x−4 的零点分布情况
解:
列出「Rouch表」如下:
s 6 1 − 2 − 7 − 4 0 s 5 1 − 3 − 4 0 0 s 4 1 − 3 − 4 0 s 3 0 0 0 0 \begin{array}{ccrrrc} s^6&1&-2&-7&-4&0\\ s^5&1&-3&-4&0&0\\ s^4&1&-3&-4&0\\ s^3&0&0&0&0\\ \end{array} s6s5s4s31110−2−3−30−7−4−40−400000
注意到: s 3 s^3 s3行出现全零行
解决方案:用 s 4 s^4 s4的系数构造偶次多项式(原因是Routh判据的证明方式就是借助的偶次多项式)
利用 s 4 s^4 s4的系数构造 F ( s ) = s 4 − 3 s 2 − 4 F(s)=s^4-3s^2-4 F(s)=s4−3s2−4
求导得到 F ′ ( s ) = 4 s 3 − 6 s F'(s)=4s^3-6s F′(s)=4s3−6s
续写Routh表:
s 6 1 − 2 − 7 − 4 0 s 5 1 − 3 − 4 0 0 s 4 1 − 3 − 4 0 s 3 4 − 6 0 s 2 − 1.5 − 4 0 s 1 − 100 3 0 s 0 − 4 0 \begin{array}{ccrrrc} s^6&1&-2&-7&-4&0\\ s^5&1&-3&-4&0&0\\ s^4&1&-3&-4&0\\ s^3&4&-6&0\\ s^2&-1.5&-4&0\\s^1&-\frac{100}3&0\\s^0&-4&0 \end{array} s6s5s4s3s2s1s01114−1.5−3100−4−2−3−3−6−400−7−4−400−40000
事实上,只要出现全零行,我们构造偶次多项式的时候,我们就不必继续算下去了,因为必然会有不稳定根。这是因为在偶次多项式中令 t = s 2 t=s^2 t=s2,无论解出来t为何值,s的两根总是关于原点对称的。只要有一个左半平面根,另一根就必然是有右半平面的。事实上,本方程有1个右半平面根 x = 2 x=2 x=2与2个虚轴根 x = ± j x=\pm j x=±j。这也与Routh表变号一次这一事实相对应。不过在这里虚轴根没有被算在不稳定根里面,所以遇到全零行这种情况,大可直接说系统不稳定就好了
四、证明思路
这一准则的证明是相对复杂的,如果不在此之前理清证明的思路,我们恐怕是难以看懂证明的。事实上,由于参考文献的许多处(不下于10处)书写错误,以及笔者自身能力的菜,导致这个证明啃了很长时间。在理清参考文献的大致思路后,笔者决定换一个更清晰的角度来证明这一准则。这一证明力图向读者展现证明的思路,为了保证其思路的清晰性,会损害一些严谨性。但是,这种直观分析方法有助于让读者理解这一证明中的核心思想。
思路:
在提到多项式在全复平面的零点,我们第一想到的必然是「代数基本定理」。而第二想到的,则应当是《复变函数》里面的「辐角原理」。不过遗憾的是,这个内容很多学校没有讲,甚至我们教材上也没有这个内容,我也是在高等教育出版社的《复变函数》中才学到这一内容 的。因此,在证明之前,我觉得应当有必要说一说「辐角原理」。
「辐角原理」:若f(z)在封闭区域 C 的边界与内部解析,且在边界上无零点,则有:
C内部的零点数= 1 2 π × \frac1{2\pi}\times 2π1×(沿C巡行一周辐角改变量)
辐角原理用「辐角」改变量刻画了「 f(z) 在区域内的零点数」。在这一问题中,我们的思路核心就是就是利用辐角原理转化问题。
总体思路:
如下图所示:取 R → ∞ R\to\infty R→∞ 的半圆围道C,并且用绕开全部虚轴零点的直线C1、C2连接之,其中P1、P2为虚轴零点,P3、P4、P5为左半平面零点。不妨记 C 0 = C + C 1 + C 2 C_0=C+C_1+C_2 C0=C+C1+C2 。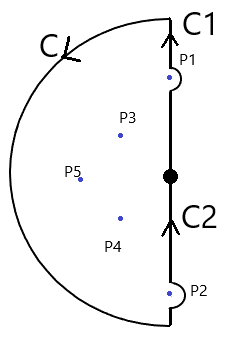
我们试图使用“筛”的方法,记原多项式为 p n ( x ) p_n(x) pn(x) ,构造一族辅助多项式 { p n ( s ) } \{p_n(s)\} {pn(s)} ,分别为n次、n-1次、…、1次、0次,由于「代数基本定理」,我们容易知道这一族辅助多项式 { p n ( s ) } \{p_n(s)\} {pn(s)} 中每个多项式的总零点数分别为n个、n-1个、…、1个、0个。那么,我们期望能找到一个充要的手段,使得:这族辅助多项式每次减少的一个零点都在左半平面。这样的话,我们就可以“筛”出n个左半平面的零点。反之,如果不能筛出n个左半平面的零点,由于这个办法是充要的,就可以说明左半平面确实没有n个零点。
那么,如何“筛”呢?根据「辐角原理」,我们知道:区域 C 0 C_0 C0 内每减少一个零点,辐角改变量减少2π。从这里入手,如果能找到一种“筛”的法则,使得每次都能减少且仅减少2π个辐角改变量,那么这个法则就能充要的判别该多项式是否只有左半平面零点。
当然,值得补充的是,巡行路径 C 0 C_0 C0 对于多项式族 { p n ( s ) } \{p_n(s)\} {pn(s)} 是不能变的。C倒没什么问题,因为 R → ∞ R\to\infty R→∞ 这一点足以让其绕过所有零点。但虚轴上的零点P1、P2则是无法绕过的。所以,我们还期望这种“筛”的法则能够让辅助多项式族 { p n ( s ) } \{p_n(s)\} {pn(s)} 在虚轴上的零点总是不变的。
好了,以上就是证明的思路梗概,接下来就是利用这个思路进行具体的证明了。
如果不想看繁琐的证明的读者,只想知道思路梗概的话,请跳转到第六章
五、证明
再把之前的图贴过来,因为后面证明会大量用到这张图。
为了证明看着方便,将Rouch表进行一些改造:
行 数 Rouch 表 辅 助 多 项 式 1 a n a n − 2 a n − 4 ⋯ a 4 a 2 a 0 h n ( s 2 ) 2 a n − 1 a n − 3 a n − 5 ⋯ a 3 a 1 g n − 2 ( s 2 ) 3 b n − 2 b n − 4 b n − 6 ⋯ b 2 b 0 h n − 2 ( s 2 ) 4 b n − 3 b n − 5 b n − 7 ⋯ b 1 g n − 4 ( s 2 ) ⋮ ⋮ ⋮ n − 1 u 2 u 0 h 2 ( s 2 ) n u 1 g 0 ( s 2 ) n + 1 v 0 h 0 ( s 2 ) \begin{array}{c|lllclll|c} 行数&&&&\text{Rouch}表&&&&辅助多项式\\ \hline 1&a_n&a_{n-2}&a_{n-4}&\cdots&a_4&a_2&a_0&h_n(s^2)\\ 2&a_{n-1}&a_{n-3}&a_{n-5}&\cdots&a_3&a_1&&g_{n-2}(s^2)\\ 3&b_{n-2}&b_{n-4}&b_{n-6}&\cdots&b_2&b_0&&h_{n-2}(s^2)\\ 4&b_{n-3}&b_{n-5}&b_{n-7}&\cdots&b_1&&&g_{n-4}(s^2)\\ \vdots&\vdots&&&&&&&\vdots\\ n-1&u_2&u_0&&&&&&h_{2}(s^2)\\ n&u_1&&&&&&&g_{0}(s^2)\\ n+1&v_0&&&&&&&h_{0}(s^2)\\ \end{array} 行数1234⋮n−1nn+1anan−1bn−2bn−3⋮u2u1v0an−2an−3bn−4bn−5u0an−4an−5bn−6bn−7Rouch表⋯⋯⋯⋯a4a3b2b1a2a1b0a0辅助多项式hn(s2)gn−2(s2)hn−2(s2)gn−4(s2)⋮h2(s2)g0(s2)h0(s2)
并构造这一族辅助多项式:
p n ( s ) = s h n ( s 2 ) + s g n − 2 ( s 2 ) p n − 1 ( s ) = s g n − 2 ( s 2 ) + s h n − 2 ( s 2 ) p n − 2 ( s ) = s h n − 2 ( s 2 ) + s g n − 4 ( s 2 ) ⋮ p 2 ( s ) = s h 2 ( s 2 ) + s g 0 ( s 2 ) p 1 ( s ) = s g 0 ( s 2 ) + s h 0 ( s 2 ) } (5.0.1) \left. \begin{aligned} p_n(s)&=\phantom{s\,} h_n(s^2)&+&s\,g_{n-2}(s^2)\\ p_{n-1}(s)&=s\,g_{n-2}(s^2)&+&\phantom{s\,} h_{n-2}(s^2)\\ p_{n-2}(s)&=\phantom{s\,} h_{n-2}(s^2)&+&s\,g_{n-4}(s^2)\\ \vdots\\ p_2(s)&=\phantom{s\,} h_2(s^2)&+&s\,g_{0}(s^2)\\ p_{1}(s)&=s\,g_{0}(s^2)&+&\phantom{s\,} h_{0}(s^2)\\ \end{aligned} \right\}\tag{5.0.1} pn(s)pn−1(s)pn−2(s)⋮p2(s)p1(s)=shn(s2)=sgn−2(s2)=shn−2(s2)=sh2(s2)=sg0(s2)+++++sgn−2(s2)shn−2(s2)sgn−4(s2)sg0(s2)sh0(s2)⎭⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎫(5.0.1)
直观地看, g(s) 是原多项式的全体奇数次项除以s, h(s) 是原多项式的全体偶数项。
举个例子或许会更直观:
如果 p 4 ( s ) = s 4 + 2 s 3 + 3 s 2 + 4 s + 5 p_4(s)=s^4+2s^3+3s^2+4s+5 p4(s)=s4+2s3+3s2+4s+5 ,
那么 h 4 ( s 2 ) = s 4 + 3 s 2 + 5 , s g 2 ( s 2 ) = 2 s 3 + 4 s h_4(s^2)=s^4+3s^2+5 , s\,g_2(s^2)=2s^3+4s h4(s2)=s4+3s2+5,sg2(s2)=2s3+4s
也就是说 g 2 ( s 2 ) = 2 s 2 + 4 g_2(s^2)=2s^2+4 g2(s2)=2s2+4
为了读者理解,此处的证明倾向于启发式,用直观的方法让读者感受准则为何成立
以下证明以n为偶数为例,n为奇数仿此证明不难。
先证明2个引理,之后的内容就水到渠成了。
引理1
引理1、辅助多项式族 { p n ( s ) } \{p_n(s)\} {pn(s)} 在虚轴上的零点(包括重数)不变
原文献证明思路是用零点定义利用代数方法化简证明来做,笔者认为这不直观,笔者采取了一种直观的方法来分析这个问题。
分析:
假设虚轴上一点 s = j ω s=j\omega s=jω 是 p n ( s ) = a n s n + a n − 1 s n + ⋯ + a 1 s + a 0 p_n(s)=a_ns^n+a_{n-1}s^n+\cdots+a_1s+a_0 pn(s)=ansn+an−1sn+⋯+a1s+a0 的零点,那么自然有:
p n ( j ω ) = a n ( j ω ) n + a n − 1 ( j ω ) n − 1 + ⋯ + a 1 ( j ω ) + a 0 = 0 (5.1.1) p_n(j\omega)=a_n(j\omega)^n+a_{n-1}(j\omega)^{n-1}+\cdots+a_1(j\omega)+a_0=0\tag{5.1.1} pn(jω)=an(jω)n+an−1(jω)n−1+⋯+a1(jω)+a0=0(5.1.1)
考虑到(5.0.1),易见:
{ p n ( s ) = h n ( s 2 ) + s g n − 2 ( s 2 ) p n − 1 ( s ) = h n − 2 ( s 2 ) + s g n − 2 ( s 2 ) (5.1.2) \begin{cases} p_n(s)&=h_n(s^2)&+sg_{n-2}(s^2)\\ p_{n-1}(s)&=h_{n-2}(s^2)&+sg_{n-2}(s^2) \end{cases} \tag{5.1.2} {pn(s)pn−1(s)=hn(s2)=hn−2(s2)+sgn−2(s2)+sgn−2(s2)(5.1.2)
因为,我们这里只考虑虚轴上的零点,代入 s = j ω s=j\omega s=jω :
{ p n ( j ω ) = h n ( − ω 2 ) + j ω g n − 2 ( − ω 2 ) p n − 1 ( j ω ) = h n − 2 ( − ω 2 ) + j ω g n − 2 ( − ω 2 ) (5.1.3) \begin{cases} p_n(j\omega)&=h_n(-\omega^2)&+j\omega g_{n-2}(-\omega^2)\\ p_{n-1}(j\omega)&=h_{n-2}(-\omega^2)&+j\omega g_{n-2}(-\omega^2) \end{cases} \tag{5.1.3} {pn(jω)pn−1(jω)=hn(−ω2)=hn−2(−ω2)+jωgn−2(−ω2)+jωgn−2(−ω2)(5.1.3)
由于h、g都是实系数多项式,那么 h ( − ω 2 ) h(-\omega^2) h(−ω2) 自然是纯实数, j ω g ( − ω 2 ) j\omega g(-\omega^2) jωg(−ω2) 也自然是纯虚数。
也就是说:公式(5.1.3)相当于对 p n ( x ) p_n(x) pn(x) 沿着实部和虚部进行拆分
回想一下,我们期望的是:多项式族 { p n ( s ) } \{p_n(s)\} {pn(s)} 的虚轴共零点,依次左半平面零点数-1。
换言之,我们期望构造出一个 u ( s 2 ) u(s^2) u(s2) ,使得 p n ( s ) = p n − 1 ( s ) + u ( s 2 ) p_n(s)=p_{n-1}(s)+u(s^2) pn(s)=pn−1(s)+u(s2) ,其中当s为 p n ( s ) p_n(s) pn(s) 的零点或者 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 的零点时, u ( s 2 ) u(s^2) u(s2) 总是为0。
这也就是我们如此构造系数 b n − 2 = − ∣ a n a n − 2 a n − 1 a n − 3 ∣ a n − 1 b_{n-2}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-2}\\ a_{n-1}&a_{n-3} \end{array} \right| }{a_{n-1}} bn−2=an−1−∣∣∣anan−1an−2an−3∣∣∣ 的理由。
好了,让我们重回证明:
考虑到系数(其余同理不予列举,详见第二章) :
b n − 2 = − ∣ a n a n − 2 a n − 1 a n − 3 ∣ a n − 1 = a n − 2 − a n a n − 3 a n − 1 b_{n-2}=\frac{- \left| \begin{array}{ll} a_{n}&a_{n-2}\\ a_{n-1}&a_{n-3} \end{array} \right| }{a_{n-1}}=a_{n-2}-\frac{a_na_{n-3}}{a_{n-1}} bn−2=an−1−∣∣∣anan−1an−2an−3∣∣∣=an−2−an−1anan−3
可以推出:
h n − 2 ( s 2 ) = b n − 2 s n − 2 + b n − 4 s n − 4 + ⋯ + b 0 = h n ( s 2 ) − a n a n − 1 s 2 g n − 2 ( s 2 ) (5.1.4) h_{n-2}(s^2)=b_{n-2}s^{n-2}+b_{n-4}s^{n-4}+\cdots+b_0=h_n(s^2)-\frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2)\tag{5.1.4} hn−2(s2)=bn−2sn−2+bn−4sn−4+⋯+b0=hn(s2)−an−1ans2gn−2(s2)(5.1.4)
将(5.1.3)两式相减:
p n ( s ) = p n − 1 ( s ) + a n a n − 1 s 2 g n − 2 ( s 2 ) (5.1.5) p_n(s)=p_{n-1}(s)+\frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2)\tag{5.1.5} pn(s)=pn−1(s)+an−1ans2gn−2(s2)(5.1.5)
我们注意到: a n a n − 1 s 2 g n − 2 ( s 2 ) \frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2) an−1ans2gn−2(s2) 就是我们要的 u ( s 2 ) u(s^2) u(s2) 。
根据公式(5.1.2),我们知道 s g n − 2 ( s 2 ) sg_{n-2}(s^2) sgn−2(s2) 同时是 p n ( s ) p_n(s) pn(s) 和 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 的虚部。无论是 p n ( s ) p_n(s) pn(s) 为0,还是 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 为0,作为其虚部的 s g n − 2 ( s 2 ) sg_{n-2}(s^2) sgn−2(s2) 必然为0,这也就证明了: p n ( s ) p_n(s) pn(s) 与 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 在虚轴上共零点。故引理1得证。
事实上,我们还可以证明:不仅零点不变,而且零点重数也不变。此处留给读者作为习题(逃)。
引理2
引理2、如图,沿 C 0 = C + C 1 + C 2 C_0=C+C_1+C_2 C0=C+C1+C2 逆时针巡行一周, 则: Δ A r g p n ( s ) − Δ A r g p n − 1 ( s ) = 2 π \Delta\mathrm{Arg}\, p_n(s)-\Delta\mathrm{Arg}\, p_{n-1}(s)=2\pi ΔArgpn(s)−ΔArgpn−1(s)=2π 的充要条件是 a n a n − 1 > 0 a_na_{n-1}>0 anan−1>0
分析:
将路径分解为C、C1、C2
①沿着C
设多项式为: p n ( s ) = ∏ i = 1 n ( s − p i ) p_n(s)=\prod_{i=1}^n(s-p_i) pn(s)=∏i=1n(s−pi)
则: Δ C A r g p n ( s ) = ∑ i = 1 n Δ C A r g ( s − p i ) \Delta_C\mathrm{Arg}\,p_n(s)=\sum_{i=1}^n\Delta_C\mathrm{Arg}\,(s-p_i) ΔCArgpn(s)=∑i=1nΔCArg(s−pi)
不失一般性地取一个 Δ A r g ( s − p i ) \Delta\mathrm{Arg}\,(s-p_i) ΔArg(s−pi) ,由于沿着C变动,如下图,我们试图说明:下图标示的角度总是180°。
看起来这一结论不可思议,因为从图上看起来它比180°大那么一点点。但事实上,如果我们稍加思索,便会发现其实显然成立的。因为 R → ∞ R\to\infty R→∞ ,无论你零点在哪里,在无穷大的半径面前,都一视同仁,蹦跶不起来。如果将这个圆想象得无穷大,那么我们可以显然得到 Δ C A r g ( s − p i ) = π ( ∀ i ) \Delta_C\mathrm{Arg}\,(s-p_i)=\pi\quad(\forall i) ΔCArg(s−pi)=π(∀i) 。
即 Δ C A r g p n ( s ) = n π \Delta_C\mathrm{Arg}\,p_n(s)=n\pi ΔCArgpn(s)=nπ , Δ C A r g p n − 1 ( s ) = ( n − 1 ) π \Delta_C\mathrm{Arg}\,p_{n-1}(s)=(n-1)\pi ΔCArgpn−1(s)=(n−1)π
那么自然有(5.2.1)式成立:
Δ C A r g p n ( s ) − Δ C A r g p n − 1 ( s ) = π (5.2.1) \Delta_C\mathrm{Arg}\, p_n(s)-\Delta_C\mathrm{Arg}\, p_{n-1}(s)=\pi\tag{5.2.1} ΔCArgpn(s)−ΔCArgpn−1(s)=π(5.2.1)

②沿着C1(C2同理,因为是对称的)
还是把图复制下来:
以及把公式(5.1.2)和(5.1.5)搬运下来:
{ p n ( s ) = h n ( s 2 ) + s g n − 2 ( s 2 ) p n − 1 ( s ) = h n − 2 ( s 2 ) + s g n − 2 ( s 2 ) (5.1.2) \begin{cases} p_n(s)&=h_n(s^2)&+sg_{n-2}(s^2)\\ p_{n-1}(s)&=h_{n-2}(s^2)&+sg_{n-2}(s^2) \end{cases} \tag{5.1.2} {pn(s)pn−1(s)=hn(s2)=hn−2(s2)+sgn−2(s2)+sgn−2(s2)(5.1.2)
p n ( s ) = p n − 1 ( s ) + a n a n − 1 s 2 g n − 2 ( s 2 ) (5.1.5) p_n(s)=p_{n-1}(s)+\frac{a_n}{a_{n-1}}s^2g_{n-2}(s^2)\tag{5.1.5} pn(s)=pn−1(s)+an−1ans2gn−2(s2)(5.1.5)
前面提到:在虚轴上,h(s)是实部,sg(s²)是虚部。显然, p n ( s ) p_n(s) pn(s) 与 p n − 1 ( s ) p_{n-1}(s) pn−1(s) 的虚部相同。
将 g n − 2 ( − ω 2 ) g_{n-2}(-\omega^2) gn−2(−ω2) 的全体零点如此排列: 0 < ω 1 < ω 2 < ⋯ < ω r < + ∞ 0<\omega_1<\omega_2<\cdots<\omega_r<+\infty 0<ω1<ω2<⋯<ωr<+∞ 。
在每个区间 ( 0 , ω 1 ) , ( ω 1 , ω 2 ) , ⋯ , ( ω r − 1 , ω r ) (0,\omega_1),(\omega_1,\omega_2),\cdots,(\omega_{r-1},\omega_r) (0,ω1),(ω1,ω2),⋯,(ωr−1,ωr) 上,由于 g n − 2 ( − ω 2 ) 为 p n ( j ω ) , p n − 1 ( j ω ) g_{n-2}(-\omega^2) 为 p_n(j\omega),p_{n-1}(j\omega) gn−2(−ω2)为pn(jω),pn−1(jω) 的虚部,所以虚部符号不会改变。
并且由于 ω i \omega_i ωi 是 g ( − ω i 2 ) g(-\omega_i^2) g(−ωi2) 的零点,则 p n ( j ω i ) = p n − 1 ( j ω i ) ( i = 1 , 2 , ⋯ , r ) p_n(j\omega_i)=p_{n-1}(j\omega_i)\quad (i=1,2,\cdots,r) pn(jωi)=pn−1(jωi)(i=1,2,⋯,r) 。
用通俗的话来总结上面这些分析,就是:以 g n − 2 ( s 2 ) g_{n-2}(s^2) gn−2(s2) 的两个相邻虚轴零点作为起点和终点为路径, Δ C ′ A r g p n ( s ) − Δ C ′ A r g p n − 1 ( s ) = 0 \Delta_{C'}\mathrm{Arg}\, p_n(s)-\Delta_{C'}\mathrm{Arg}\, p_{n-1}(s)=0 ΔC′Argpn(s)−ΔC′Argpn−1(s)=0 2
推而广之,沿着0到 g n − 2 ( s ) g_{n-2}(s) gn−2(s) 的最大的一个零点 j ω r j\omega_r jωr 走,也有 Δ C ′ A r g p n ( s ) − Δ C ′ A r g p n − 1 ( s ) = 0 \Delta_{C'}\mathrm{Arg}\, p_n(s)-\Delta_{C'}\mathrm{Arg}\, p_{n-1}(s)=0 ΔC′Argpn(s)−ΔC′Argpn−1(s)=0 ,而且在 s = j ω r s=j\omega_r s=jωr 处有 p n ( j ω r ) = p n − 1 ( j ω r ) p_n(j\omega_r)=p_{n-1}(j\omega_r) pn(jωr)=pn−1(jωr)
再换句话说,就是:
Δ C 1 A r g p n ( s ) − Δ C 1 A r g p n − 1 ( s ) = A r g p n ( j ∞ ) − A r g p n − 1 ( j ∞ ) (5.2.2) \Delta_{C_1}\mathrm{Arg}\, p_n(s)-\Delta_{C_1}\mathrm{Arg}\, p_{n-1}(s)=\mathrm{Arg}\, p_n(j\infty)-\mathrm{Arg}\, p_{n-1}(j\infty)\tag{5.2.2} ΔC1Argpn(s)−ΔC1Argpn−1(s)=Argpn(j∞)−Argpn−1(j∞)(5.2.2)
这么一看,就豁然开朗了!原来 p n p_n pn 和 p n − 1 p_{n-1} pn−1 在 C 1 C_1 C1 上的辐角变化只取决于 j ∞ j\infty j∞ 处的辐角差啊!
一涉及到无穷,我们一般就会很开心,因为这意味着低阶项我们都可以扔掉不管,只考虑最高阶的项,让我们来试试:
Δ C 1 A r g p n ( s ) − Δ C 1 A r g p n − 1 ( s ) = A r g p n ( j ∞ ) p n − 1 ( j ∞ ) = A r g a n j ω a n − 1 \Delta_{C_1}\mathrm{Arg}\, p_n(s)-\Delta_{C_1}\mathrm{Arg}\, p_{n-1}(s)=\mathrm{Arg}\, \frac{p_n(j\infty)}{p_{n-1}(j\infty)}=\mathrm{Arg}\, \frac{a_nj\omega}{a_{n-1}} ΔC1Argpn(s)−ΔC1Argpn−1(s)=Argpn−1(j∞)pn(j∞)=Argan−1anjω
也就是说,辐角差取决于 a n a_n an 和 a n − 1 a_{n-1} an−1 是否同号,总结一下:
Δ C 1 A r g p n ( s ) − Δ C 1 A r g p n − 1 ( s ) = { − π 2 , if a n a n − 1 > 0 − π 2 , if a n a n − 1 < 0 (5.2.3) \Delta_{C_1}\mathrm{Arg}\, p_n(s)-\Delta_{C_1}\mathrm{Arg}\, p_{n-1}(s)=\begin{cases} \phantom-\frac\pi2,&\text{if}\,a_na_{n-1}>0\\ -\frac\pi2,&\text{if}\,a_na_{n-1}<0 \end{cases} \tag{5.2.3} ΔC1Argpn(s)−ΔC1Argpn−1(s)={−2π,−2π,ifanan−1>0ifanan−1<0(5.2.3)
Δ C 2 A r g p n ( s ) − Δ C 2 A r g p n − 1 ( s ) = { − π 2 , if a n a n − 1 > 0 − π 2 , if a n a n − 1 < 0 (5.2.4) \Delta_{C_2}\mathrm{Arg}\, p_n(s)-\Delta_{C_2}\mathrm{Arg}\, p_{n-1}(s)=\begin{cases} \phantom-\frac\pi2,&\text{if}\,a_na_{n-1}>0\\ -\frac\pi2,&\text{if}\,a_na_{n-1}<0 \end{cases} \tag{5.2.4} ΔC2Argpn(s)−ΔC2Argpn−1(s)={−2π,−2π,ifanan−1>0ifanan−1<0(5.2.4)
总结一下(5.2.1)、(5.2.3)、(5.2.4):
Δ C 0 A r g p n ( s ) − Δ C 0 A r g p n − 1 ( s ) = { 2 π , if a n a n − 1 > 0 0 , if a n a n − 1 < 0 (5.2.5) \Delta_{C_0}\mathrm{Arg}\, p_n(s)-\Delta_{C_0}\mathrm{Arg}\, p_{n-1}(s)=\begin{cases} 2\pi,&\text{if}\,a_na_{n-1}>0\\ 0,&\text{if}\,a_na_{n-1}<0 \end{cases} \tag{5.2.5} ΔC0Argpn(s)−ΔC0Argpn−1(s)={2π,0,ifanan−1>0ifanan−1<0(5.2.5)
考虑到(5.2.5),根据辐角原理, p_{n-1} 比 p_n 减少一个左半平面零点,当且仅当 a n a n − 1 > 0 a_na_{n-1}>0 anan−1>0 ,故引理2得证。
结合引理1、2,原定理自然成立
六、证明思路梗概
我们注意到,证明的思路核心在于引理1、2,我们通过「辐角原理」将问题转化为 C 0 C_0 C0 围道的辐角问题,系数选择其实也是为了迎合「虚轴零点不变」、「公式(5.1.5)」。在确定好这些后,我们又注意到:C这个半无穷大圆围道会带来π的辐角变化,C1、C2则取决于 j ∞ j\infty j∞ 处的辐角,而 j ∞ j\infty j∞ 处,由于是无穷远的点,自然其辐角取决于 a n a n − 1 a_na_{n-1} anan−1 是否同号。这一系列转换,最终将问题转化为了Rouch表第一列是否同号的问题。
七、参考文献/书籍
- 「何琴芳.证明Routh-Hurwitz稳定性判据的一个简明方法[J].电工教学,1992(03):12-18.」
- 「俞菲,孟桥,樊祥宁.浅谈Routh-Hurwitz判据中的若干应用[J].电气电子教学学报,2013,35(01):12-14.」
- 「曾禹村.信号与系统(第四版)[M].北京:北京理工大学出版社.2018,304-305」
我们在习惯上认为:「虚轴上的一阶极点对应的临界稳定状态」也属于「不稳定状态」 ↩︎
事实上,这样断言是不够严谨的,因为如果此时p(s)也是零点,实部虚部均为0,而复数0的辐角是没有意义的。但我们很容易舍去这种情况,因为根据1的讨论, p n p_n pn和 p n − 1 p_{n-1} pn−1在虚轴上的零点是完全相同的,所以不会对辐角产生影响。 ↩︎
这篇关于Routh-Hurwitz准则——判别实系数多项式有无实部非负的根的充要条件的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!