本文主要是介绍弹簧质量阻尼系统前馈PID位置控制(PLC闭环仿真SCL+ST代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
弹簧阻尼系统的前馈PID控制请参看下面文章链接:
前馈控制之如何计算前馈量(质量弹簧阻尼系统)_前馈控制量_RXXW_Dor的博客-CSDN博客带前馈控制的博途PID程序请参看下面的文章链接:首先我们看下什么是弹簧阻尼系统。1、质量弹簧阻尼模型。_前馈控制量https://rxxw-control.blog.csdn.net/article/details/128826036这篇博客我们介绍在PLC里如何完成弹簧阻尼系统的建模(微分方程的数值求解)。
1、弹簧-阻尼系统
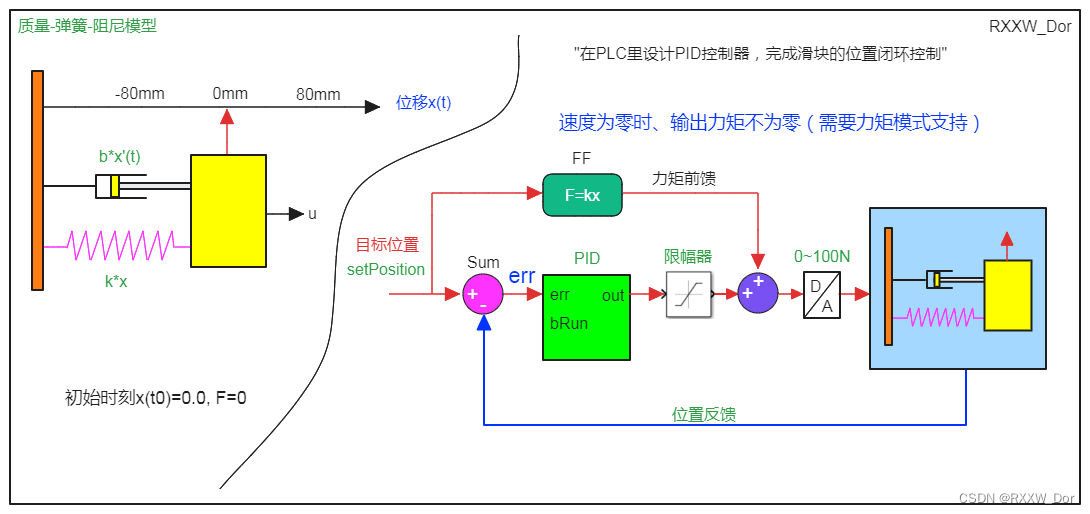
终所周知,牛顿第二定律利用微积分,加速度可以表达为位置矢量的二阶导数F=Ma=M*x'',带阻尼的弹簧力可以利用胡克定律进行计算。下面我们看下弹簧阻尼系统的微分方程。
2、微分方程
这篇关于弹簧质量阻尼系统前馈PID位置控制(PLC闭环仿真SCL+ST代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






