阻尼专题
OpenGL/GLUT实践:弹簧-质量-阻尼系统模拟摆动的绳子和布料的物理行为(电子科技大学信软图形与动画Ⅱ实验)
源码见GitHub:A-UESTCer-s-Code 文章目录 1 实现效果2 实现过程2.1 一维弹性物体模拟2.1.1 质点类(Mass)2.1.2 弹簧类(Spring)2.1.3 模拟类(RopeSimulation)2.1.4 openGL实现 2.2 二维弹性物体模拟2.2.1 模拟类改进(1) Simulation1 类(2) ClothSimulation 类 2.2.2 o

ListView阻尼效果
效果图省略。。。 activity_main.xml(只有一个自定义ListView) <RelativeLayout xmlns:android="http://schemas.android.com/apk/res/android"xmlns:tools="http://schemas.android.com/tools"android:layout_width="match_par
Simulink|虚拟同步发电机(VSG)惯量阻尼自适应控制仿真模型
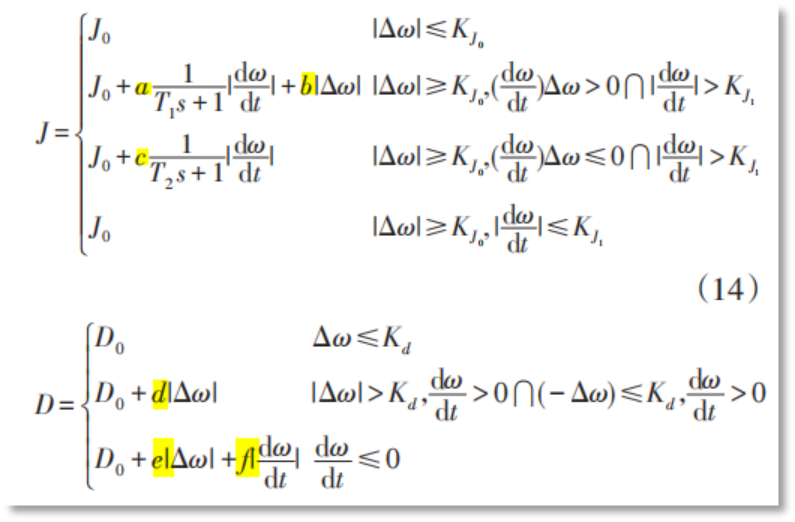
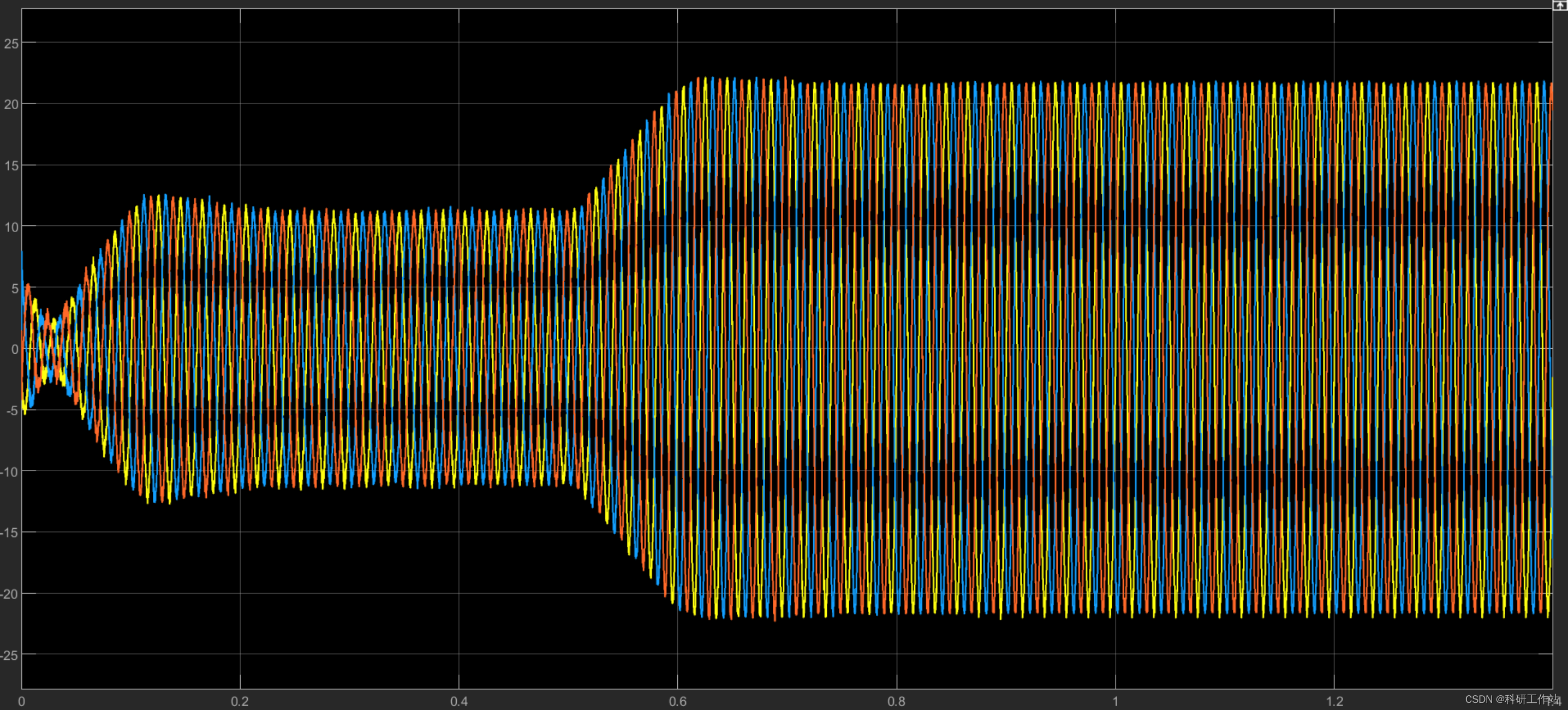
主要内容 该模型为simulink仿真模型,主要实现的内容如下: 随着风力发电、光伏发电等新能源发电渗透率增加,电力系统的等效惯量和等效阻尼逐渐减小,其稳定性问题变得越来越严峻。虚拟同步发电机(VSG)技术的提出能有效地解决这一问题。然而,传统的VSG并网逆变器采用恒惯量和阻尼控制,在系统受到扰动时,其鲁棒性较差。因此,为增强系统的鲁棒性,优化其频率响应曲线,提出了一种并网VSG
Simulink|【免费】虚拟同步发电机(VSG)惯量阻尼自适应控制仿真模型
目录 主要内容 仿真模型要点 2.1 整体仿真模型 2.2 电压电流双闭环模块 2.3 SVPWM调制策略 2.4 无功电压模块 2.5 自适应控制策略及算法 部分结果 下载链接 主要内容 该模型为simulink仿真模型,主要实现的内容如下: 随着风力发电、光伏发电等新能源发电渗透率增加,电力系统的等效惯量和等效阻

【论文推导】基于有功阻尼的转速环PI参数整定分析
前言 在学习电机控制的路上,PMSM的PI电流控制是不可避免的算法之一,其核心在于内环电流环、外环转速环的设置,来保证转速可调且稳定,并且保证较好的动态性能。整个算法仿真在《现代永磁同步电机控制原理及matlab仿真》中已详细给出,但针对转速环中的“有功阻尼”推导转速话PI参数的过程,描述得较为模糊,理解起来比较困难,故本文将基于现有资料给出“基于有功阻尼转速环PI参数整定”的分析。 理论
VINS-MONO拓展1----手写后端求解器,LM3种阻尼因子策略,DogLeg,构建Hessian矩阵
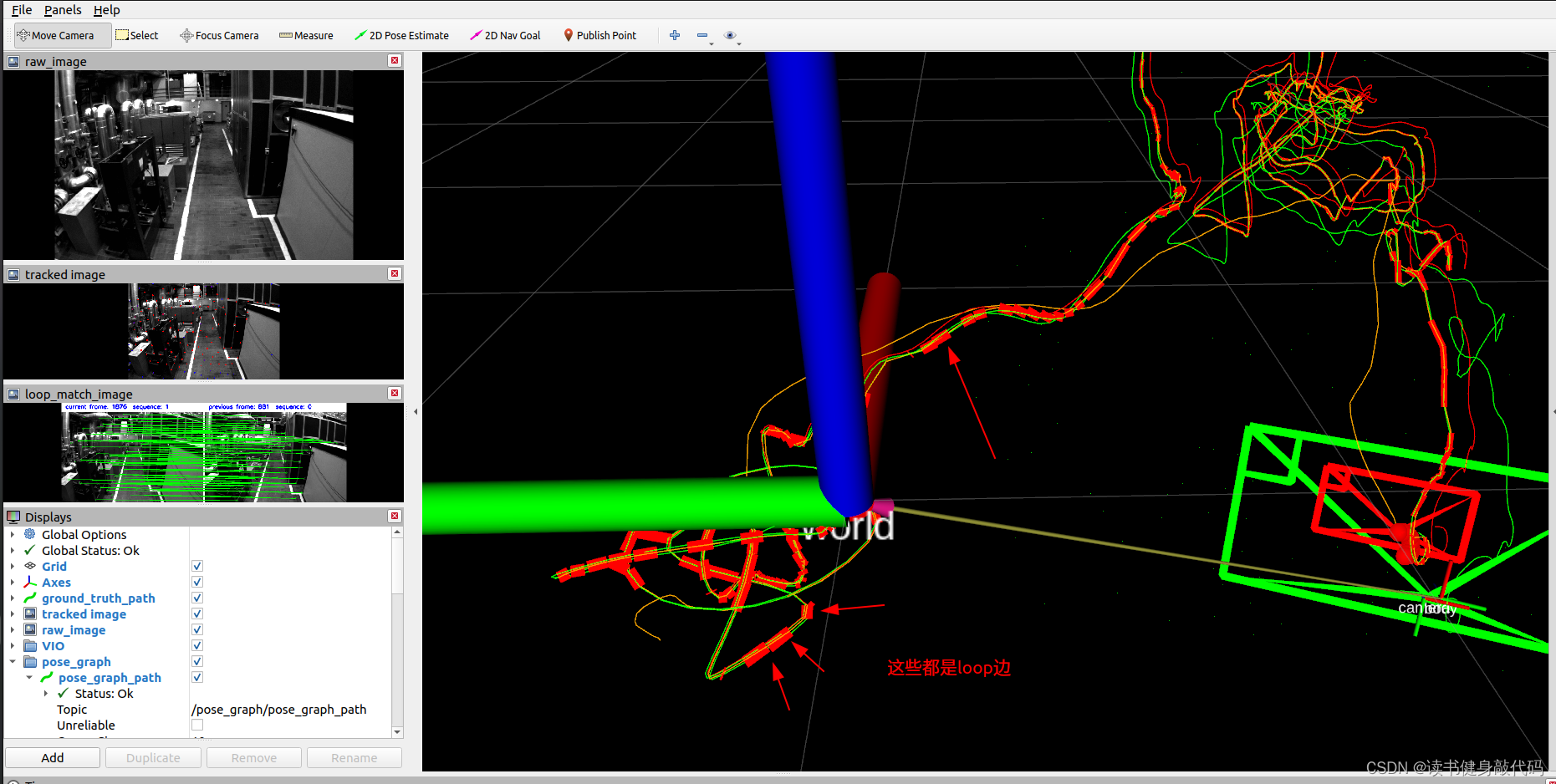
文章目录 0. 目标及思路1. 非线性优化求解器2. 基于VINS-MONO的Marginalization框架构建Hessian矩阵2.1 estimator.cpp移植2.2 solve.cpp/preMakeHessian()2.3 solve.cpp/makeHessian() 3. solve.cpp/solveLinearSystem()求解正规方程4. 更新状态5. 迭代求解6

VINS-MONO拓展1----手写后端求解器,LM3种阻尼因子策略,DogLeg,构建Hessian矩阵
文章目录 0. 目标及思路1. 非线性优化求解器2. 基于VINS-MONO的Marginalization框架构建Hessian矩阵2.1 estimator.cpp移植2.2 solve.cpp/preMakeHessian()2.3 solve.cpp/makeHessian() 3. solve.cpp/solveLinearSystem()求解正规方程4. 更新状态5. 迭代求解6
阻抗控制中的弹簧与阻尼影响分析
阻抗控制是一种机器人控制方法,通过调整机器人的阻抗来实现对机器人的精准控制。在阻抗控制中,弹簧和阻尼是两个重要的参数,它们对机器人的性能和稳定性有很大的影响。 弹簧代表机器人的刚度和弹性,而阻尼代表机器人的阻尼特性,即能量耗散能力。在阻抗控制中,弹簧和阻尼的调整可以影响机器人的运动性能和稳定性。 弹簧的影响: 增加弹簧的刚度可以使机器人在受到外部力作用时更加稳定,减少振动和变形。适当减小弹簧
快速碰撞刚性环境的机器人低阻抗控制(阻尼影响分析)
问题描述 在快速碰撞刚性环境的机器人低阻抗控制中,需要通过精确的碰撞检测和处理,以及低阻抗控制策略的优化,来减少碰撞对机器人和环境的影响。同时,我们还需要适应刚性环境,提高机器人的稳定性和鲁棒性,以满足实时性的要求。 推荐一篇感觉还不错的阻抗控制相关知乎文章: 看完这篇文章,没有人比你更懂机械臂柔顺控制 - 知乎一提到柔顺控制技术,即便不是做机械臂控制的专业人员,也能想到一些名词:力传感器、

cv姿态评估:Levenberg-Marquardt优化-阻尼最小二乘(DLS)
'''自己整理备忘,也供后人参考。KZ@njucs.onMicrosoft.com本节记录了cv姿态评估的常见思路,建立模型的方法与Levenberg-Marquardt优化原理。在下一节中,我们将讨论如何在工程上将旋转向量、欧拉角与四元数之间进行转换。''' 基础知识: 仿射变换是计算机视觉领域应用十分广泛的特殊变换。是指在几何中,一个向量进行一次线性变换并接上一个平移,变换为另一

【JY】结构瑞利阻尼与经济订货模型
不等待 即关注 简介 瑞利阻尼是学习《结构动力学》多自由度振动必不可少的学习内容,而经济订货模型(EOQ)是经济学中《财务管理》比较关键的内容,八竿子打不着的他们,二者有什么相似呢? 首先,先科普下经济订货模型 (EOQ),即 Economic Order Quantity 是固定订货批量模型的一种,可以用来确定企业一次订货(外购或自制)的数量。当企业按照经济订货批量来订货时,
Unity-Animato深入系列---FloatValue阻尼
回到 Animator深入系列总目录 Animator的SetFloat接口可以设置阻尼,并且4种类型变量只有float是支持阻尼的。 public void SetFloat(int id, float value, float dampTime, float deltaTime); 当设置阻尼为0.2时 if (direction > 0) direction = 1;e
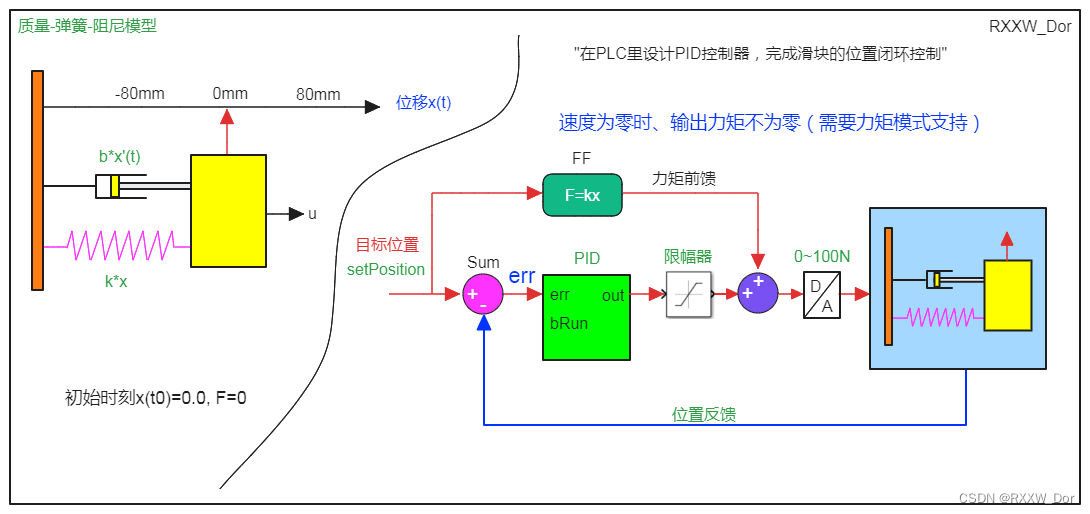
弹簧质量阻尼系统前馈PID位置控制(PLC闭环仿真SCL+ST代码)
弹簧阻尼系统的前馈PID控制请参看下面文章链接: 前馈控制之如何计算前馈量(质量弹簧阻尼系统)_前馈控制量_RXXW_Dor的博客-CSDN博客带前馈控制的博途PID程序请参看下面的文章链接:首先我们看下什么是弹簧阻尼系统。1、质量弹簧阻尼模型。_前馈控制量https://rxxw-control.blog.csdn.net/article/details/128826036这篇博客我们介绍在P

学习: matplotlib绘制阻尼正弦波
介绍 阻尼正弦波定义: 振幅会随时间增长而趋向零的正弦波函数 示例图片 应用 a.任何振动系统 b.共振 c.简谐运动(弹簧、单摆) d.车辆避震系统 e.RLC电路 f.有阻尼的弦波 绘制方法 import matplotlib.pyplot as pltimport numpy as np#阻尼正弦波计算公式def f(t)
模型预测控制(MPC)解析(十):弹簧质量阻尼的MPC仿真
之前的博客都是讲的理论,现在以一个实际控制例子进行仿真分析。弹簧质量阻尼系统是最典型的二阶系统,本文就用MPC算法来控制弹簧质量阻尼系统。首先建立弹簧质量阻尼系统的模型,然后将连续时间模型转换成离散模型,推倒预测和优化方程,将控制问题转化成标准二次型问题,分别使用解析法和数值法两种优化求解方式,最后用Matlab进行了单位阶跃响应MPC控制仿真。文末给出了仿真源码的地址。 一、