本文主要是介绍Social Bot-Aware Graph Neural Network for Early Rumor Detection阅读笔记,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Social Bot-Aware Graph Neural Network for Early Rumor Detection
摘要
社会学研究表明,社交机器人早期的行为已经成为谣言广泛传播的主要原因。但现有研究无法有效区分机器人和真人,谣言识别也不够早。本文旨在通过考虑社交机器人的行为来进行早期谣言检测,并提出了一种社交机器人图形神经网络(SBAG)。SBAG首先预训练多层感知网络捕捉社交机器人特征,然后通过嵌入特征构建多图神经网络,对帖子的早期传播进行建模,进而用于检测谣言。在三个基准数据集上的大量实验表明,SBAG相对于基准数据集取得了显著的改进,并在3小时内识别出了谣言,同时保持了90%以上的准确性。
introduction
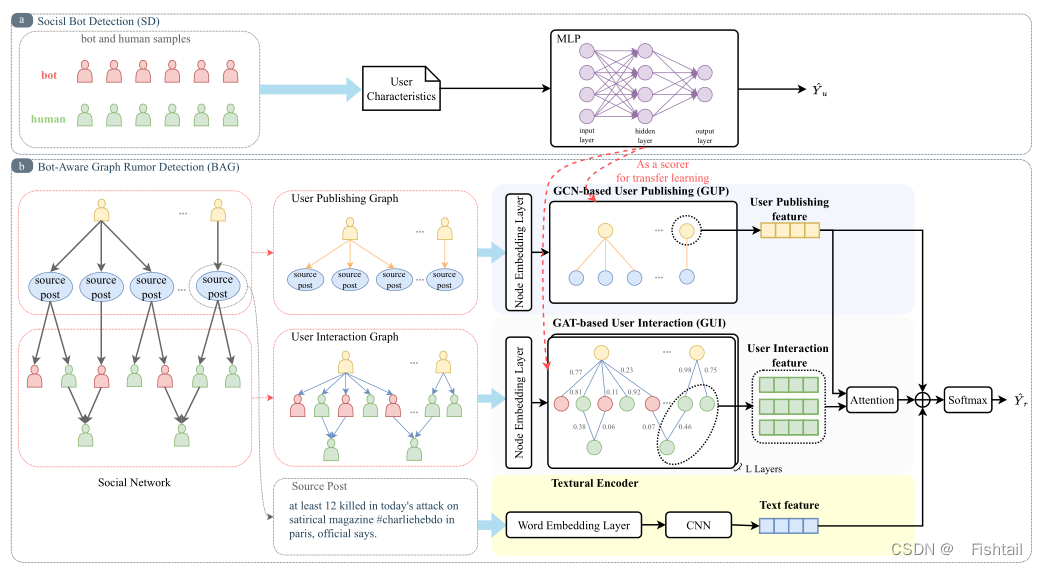
如何避免社交机器人干扰模型的准确性,早先的研究并没有考虑这一情况。该文提出了一种用于早期谣言检测的社交机器人感知图神经网络(SBAG),该网路由两个部分构成。社交机器人检测SD和机器人感知的图谣言检测BAG。
前者是预训练的模型,用于提取用户的特征并计算用户是机器人的可能性。后者包括基于用户发布的GNN和用户互动的GAT以及上下文编码器。
主要贡献:
- 基于社会学研究的观察,文章考虑了社交机器人的行为并训练了检测模型。研究结果表明社交机器人再谣言早期是活跃的。
- 提出了SBAG用于谣言检测。
问题定义
与其他的谣言检测问题定义不太一样,该文因为涉及机器人探测,加了一些新东西。
- 推文集 R = r i R={r_i} R=ri
- 用户集 U = u i U={u_i} U=ui
- 用户发布图 G p = < V p , E p > G_p=<V_p,E_p> Gp=<Vp,Ep> Vp是所有推文和推文发布者的集合,Ep表示用户和推文的关系。G_p最多只有一跳。
- 用户交互图 G u = < V u , E u > G_u=<V_u,E_u> Gu=<Vu,Eu>
- 机器人检测:u->Y_u
- 谣言检测:r->Y_r
社交机器人检测
这个领域没了解过,大概也是一个social network中的热门领域。
预训练阶段用MLP作为网络骨架。设c为用户特征(用户名,粉丝数等)
输出用户是机器人的概率分布。
用了14个机器人检测数据集来确定。
机器人感知的图神经网络
用户发布的图卷积
用户交互的GAT(图注意力网络)
语义编码器
实验
数据集
用api拓展了数据集。添加了许多用户的个人信息。(但是数据集都比较老,信息特征可能会过时?)
实验结果和分析
在推特和weibo上的准确率都很高。
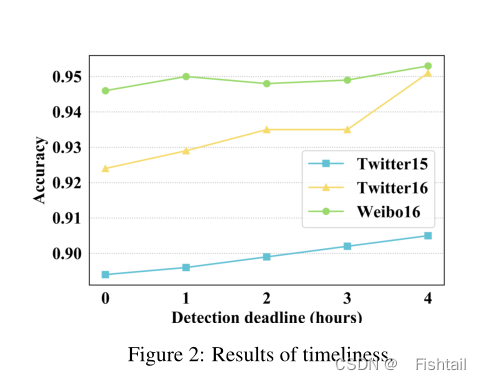
在早期检测上的准确里也很高。
消融实验上结果如图
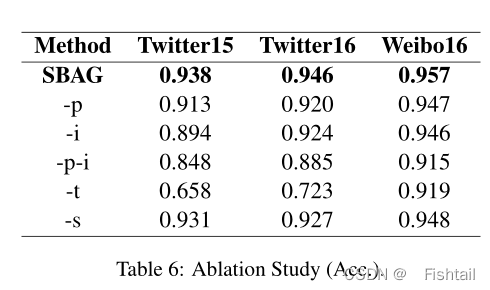
消融实验表明了几点:
- 推文的发布特征和交互特征很重要
- 只对文本特征检测谣言是不理想的,但是抛开源文本进行谣言检测效果会更糟。用户特征和文本特征具有互补关系。
- 但是社交机器人在谣言检测上的作用很小。(但能提升一个百分点说明还是有用啦)
机器人行为分析
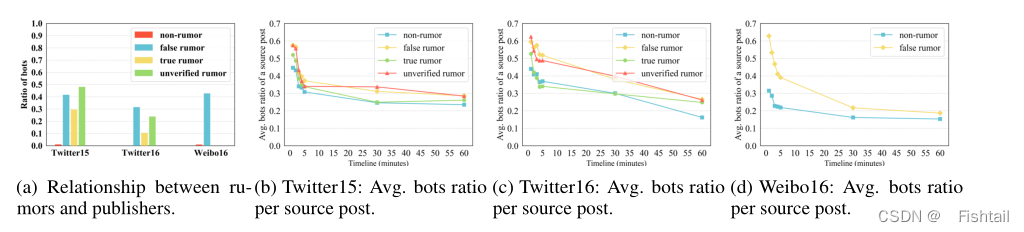
在帖子发布早期机器人的行为更活跃。机器人行为用户的虚假谣言和未证实谣言的比例高于非谣言和真实谣言的比例。SBAG的研究结果与社会学研究结果一致,也证明了我们的模型具有较强的解释性。
连接到机器人可能性较低的用户的边缘具有较高的注意权重。这种聚合方式有助于学习更有效的早期传播模式。
接到机器人可能性较低的用户的边缘具有较高的注意权重。这种聚合方式有助于学习更有效的早期传播模式。
这篇关于Social Bot-Aware Graph Neural Network for Early Rumor Detection阅读笔记的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








