本文主要是介绍Lecture 3: Independence,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言:本文讲了事件之间的独立性
独立性定义
韦恩图不能表述独立性
条件对独立性的影响
独立和两两独立的关系

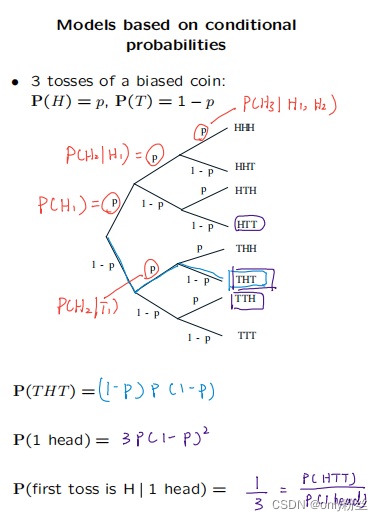
第二次掷硬币的概率不会被第一次投掷的结果所影响,都是P
independence: the first event whether or not occour, will not bring any information that affect the second event
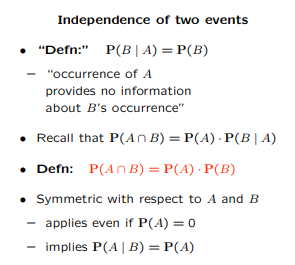
第一种定义
A的出现不会影响任何对于B的判断。
这种定义里 P ( A ) P(A) P(A) 一定大于0, 不然条件概率没有意义
第二种定义:
两个事件AB同时发生的概率是两个事件发生概率的乘积
A 和 B完全不是独立事件,如果A 发生 B一定不发生,韦恩图不能判断事件是否独立
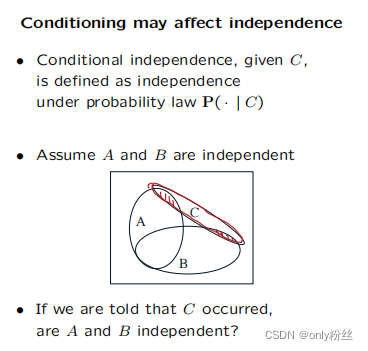
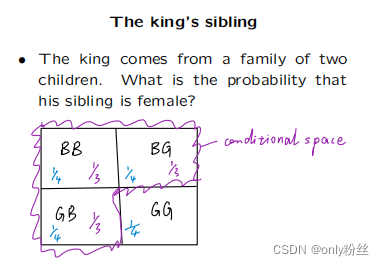
当被告知event C已经发生的时候,所有发生的outcome只会落在C中,所以we have a new universe, 然而在这个新的universe中,A和B是disjoint的,由上文可知,一定不是独立的。
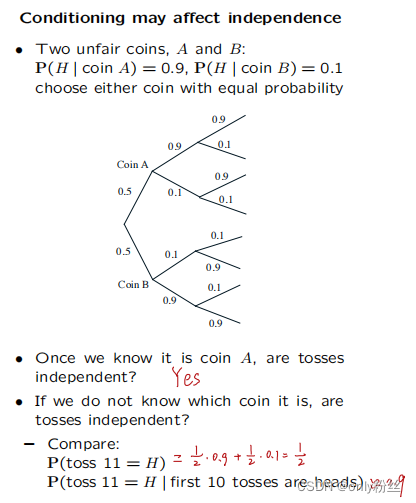
如果知道前十次都是head很大可能是coinA,所以在这个例子里,第十一次是head和前十次都是head是不独立的,是会互相影响的。
举例:
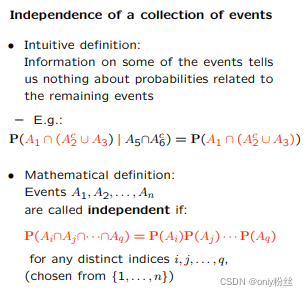
如果 n = 3
P ( A 1 ∩ A 2 ∩ A 3 ) = P ( A 1 ) P ( A 2 ) P ( A 3 ) P ( A 1 ∩ A 2 ) = P ( A 1 ) P ( A 2 ) P ( A 1 ∩ A 3 ) = P ( A 1 ) P ( A 3 ) P ( A 2 ∩ A 3 ) = P ( A 2 ) P ( A 3 ) P(A_1\cap A_2\cap A_3) = P(A_1)P(A_2)P(A_3)\\ P(A_1\cap A_2) = P(A_1)P(A_2)\\ P(A_1\cap A_3) = P(A_1)P(A_3)\\ P(A_2\cap A_3) = P(A_2)P(A_3)\\ P(A1∩A2∩A3)=P(A1)P(A2)P(A3)P(A1∩A2)=P(A1)P(A2)P(A1∩A3)=P(A1)P(A3)P(A2∩A3)=P(A2)P(A3)
上面这个就是3个事件完全独立。
还有一种独立是两两独立(pairwise independence),和完全的独立是不一样的,对于上面的例子 P ( A 1 ∩ A 2 ∩ A 3 ) = P ( A 1 ) P ( A 2 ) P ( A 3 ) P(A_1\cap A_2\cap A_3) = P(A_1)P(A_2)P(A_3) P(A1∩A2∩A3)=P(A1)P(A2)P(A3)这个条件不是trivial的
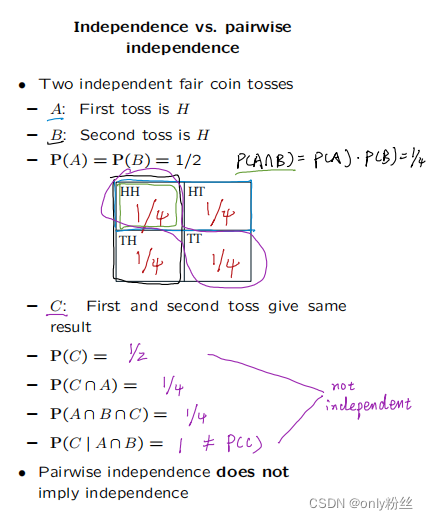
这个例子里:A发生没有对C产生影响,B发生没有对C产生影响,但是AB同时发生就会对C产生影响。
moral: 寓意
impose a requirement
precedence:领先; 优先权; 地位先后
这篇关于Lecture 3: Independence的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!