本文主要是介绍基于卡尔曼滤波的质心侧偏角估计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
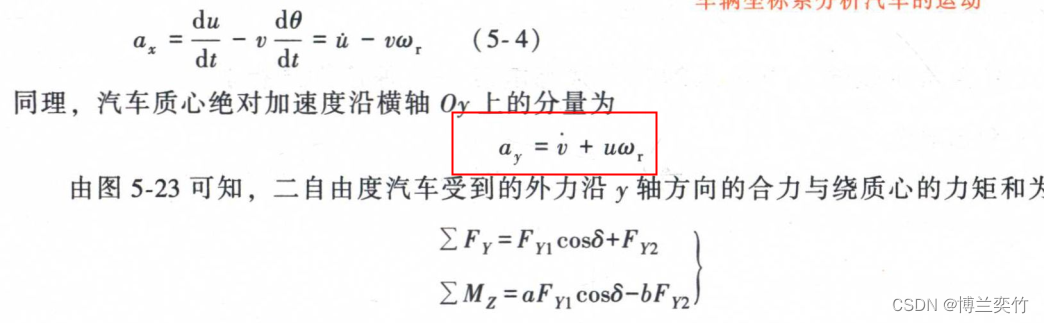
1、先上汽车理论171页公式。

求导β=v/u得到
![]()
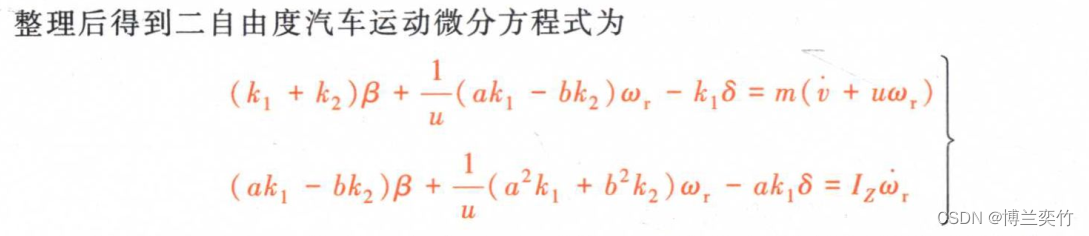
2、根据以上公式,选取质心侧偏角β和横摆角速度 ω作为状态变量,前轮转角δf作为输入量,可以通过方向盘转角获得;选取方便观测的侧向加速度和横摆角速度作为观测量,则状态方程和测量方程为

3.卡尔曼A、B、C、D矩阵求解
则



其他参数赋值

4、模型搭建
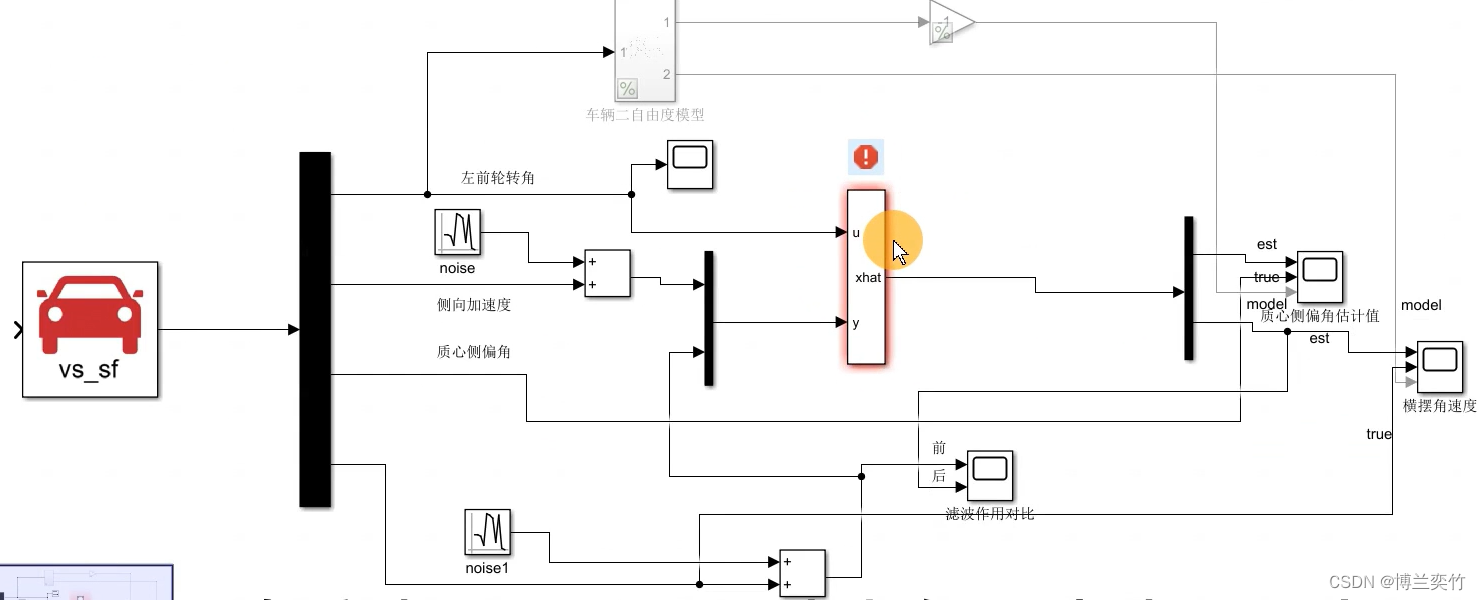
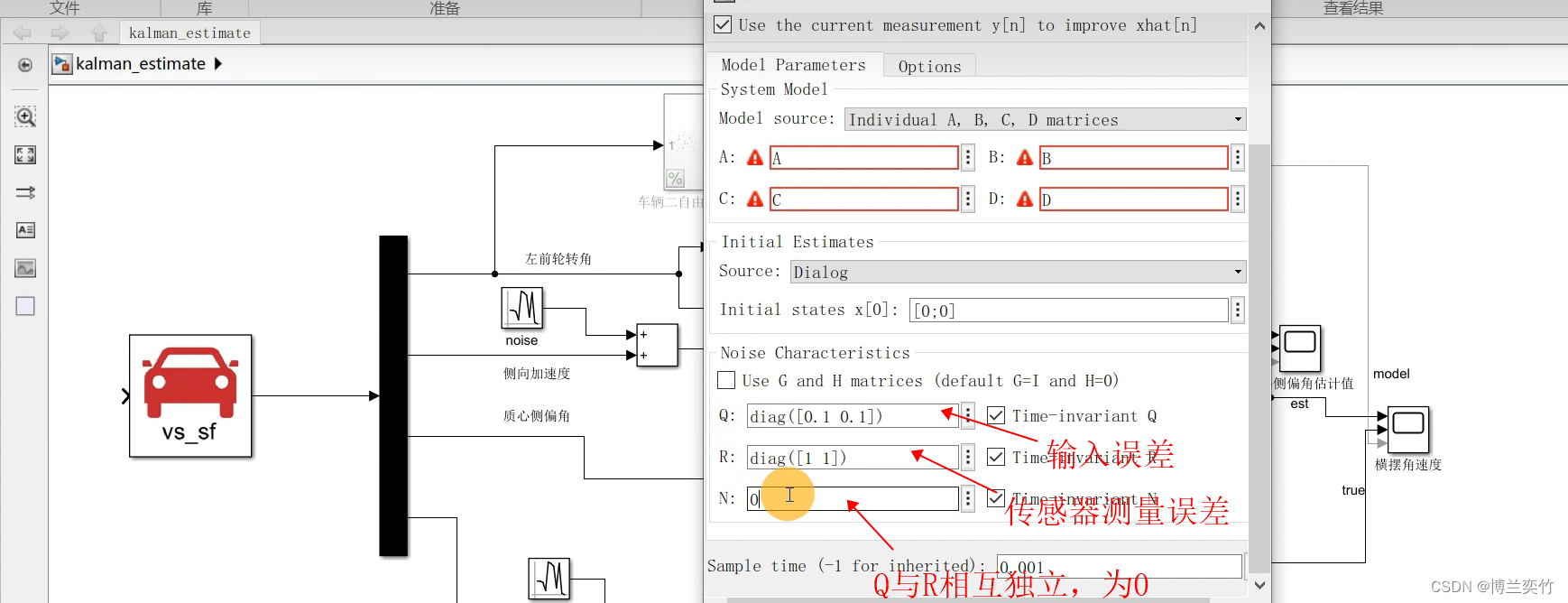
5、carsim与simulink联合仿真


6、由于Simulink function生成代码时,移植性较差,所以我又用simulink搭建了一遍模型。
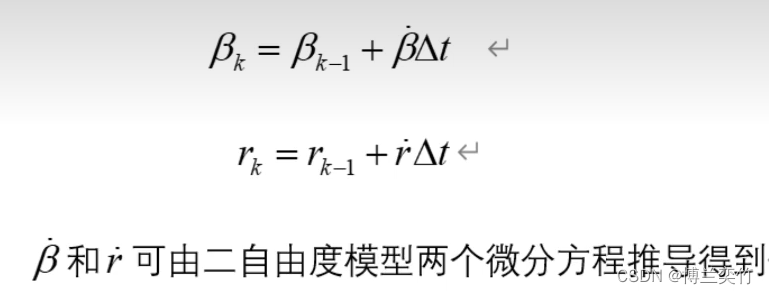
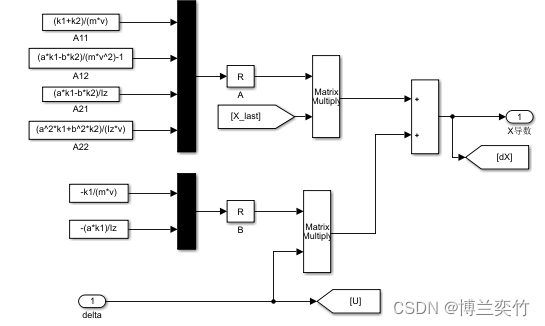
1、计算先验估计值需要用到的X导数
2、先验估计值和雅可比矩阵

3、先验协方差、增益、后验估计值
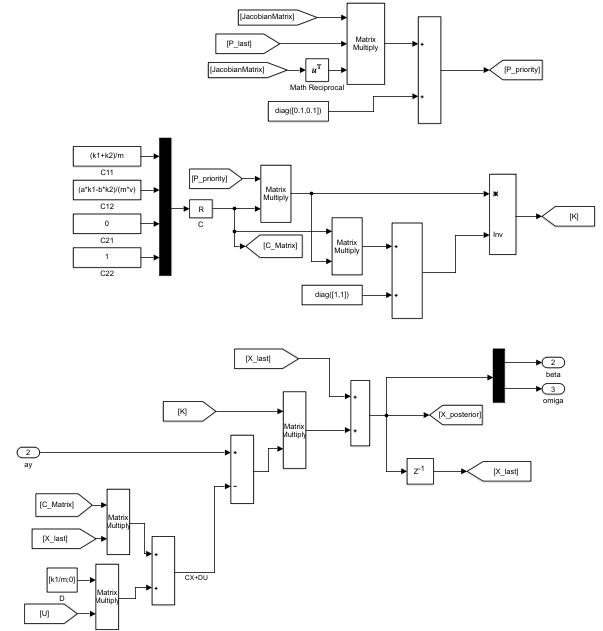
4、后验协方差

这篇关于基于卡尔曼滤波的质心侧偏角估计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









