本文主要是介绍解决nav2_bringup tb3_simulation_launch.py 无法启动Gazebo的问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
方法 1
断网再开gazebo.
评价: 方便且有效, 但来回联网很麻烦
参考: https://blog.csdn.net/James___H/article/details/116906217
方法 2
断网能打开是因为gazebo软件开启时会自动从网络下载模型,下载过程必然漫长, 另外你懂的, 网络问题嘛, vpn也解决不了的话就基本无解了。
Step 1
所以我们可以在本地提前下载模型:
git clone https://github.com/osrf/gazebo_models
把文件重命名为models 后, 放到 ~/.gazebo下即可
这样咱们单独打开gazebo就不会有什么问题了.
Step 2
找到**/opt/ros/foxy/share/nav2_bringup/launch/tb3_simulation_launch.py**, 如下修改对应行:

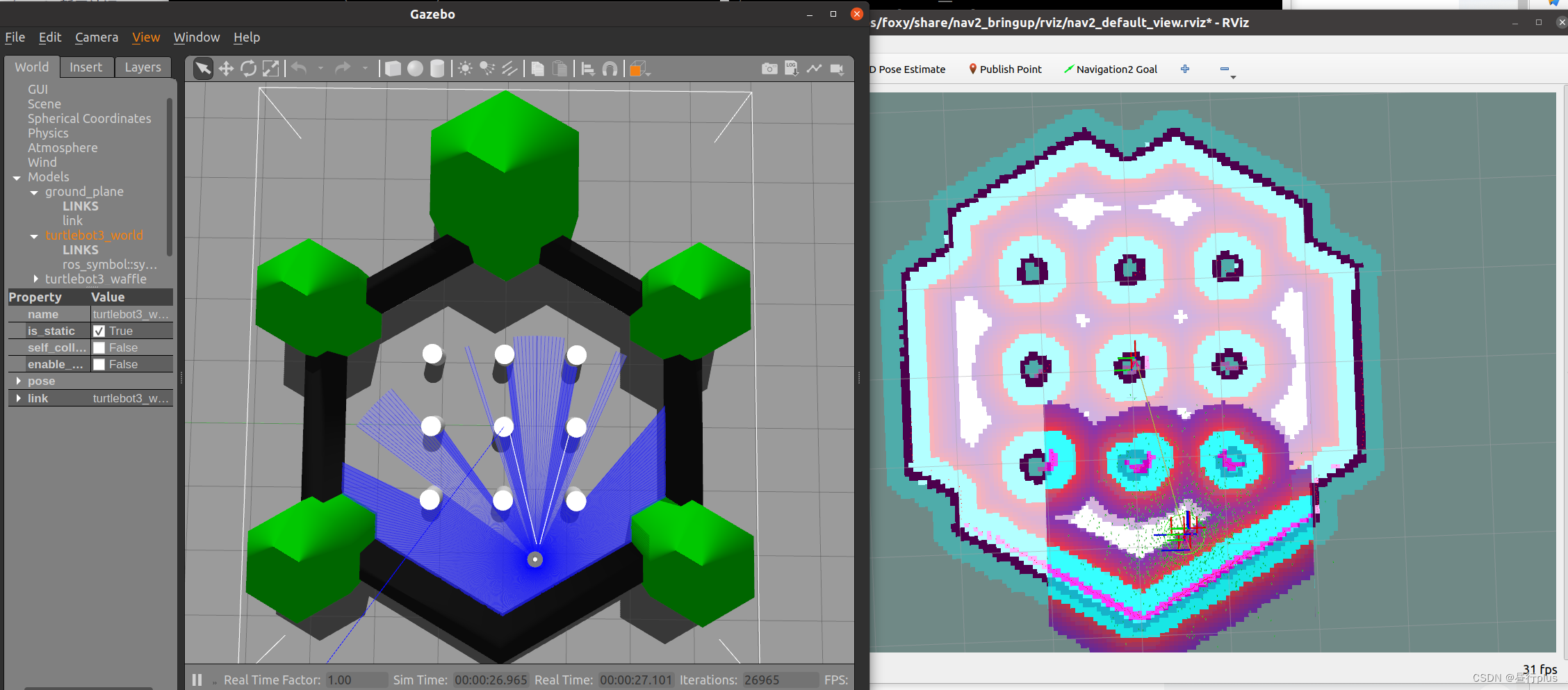
至此 tb3_simulation_launch.py 的gazebo也不会卡住了!
这篇关于解决nav2_bringup tb3_simulation_launch.py 无法启动Gazebo的问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






