nav2专题
ROS2+TurtleBot3+Cartographer+Nav2实现slam建图和导航
0 引言 入门机器人最常见的应用就是slam建图和导航,本文将详细介绍这一流程, 便于初学这快速上手。 首先对需要用到的软件包就行简单介绍。 turtlebot3: 是一个小型的,基于ros的移动机器人。 学习机器人的很多示例程序都是基于turtlebot3。 Cartographer: 是一个流行的slam建图工具包。 Nav2: 是一个流行的导航工具包。 gazebo: 是一个基于ros的物
NAV2 ros galactic安装教程
sudo apt install ros-galactic-gazebo-* 这个必须下载 sudo apt-get install -y ros-galactic-rmw* 这个也是 使用操作系统中的包管理器安装 Nav2 包: sudo apt install ros-galactic-navigation2sudo apt install ros-gal

ROS2+NAV2中常用的指令
1.查看存在的topic: ros2 topic list 2.输出某个topic的信息: ros2 topic echo [topic_name] #example: ros2 topic echo /gps/fix 3.查看存在的node: ros2 node list 4.查看某个no
ros2的nav2_map_server导入地图时,rviz2显示no map received
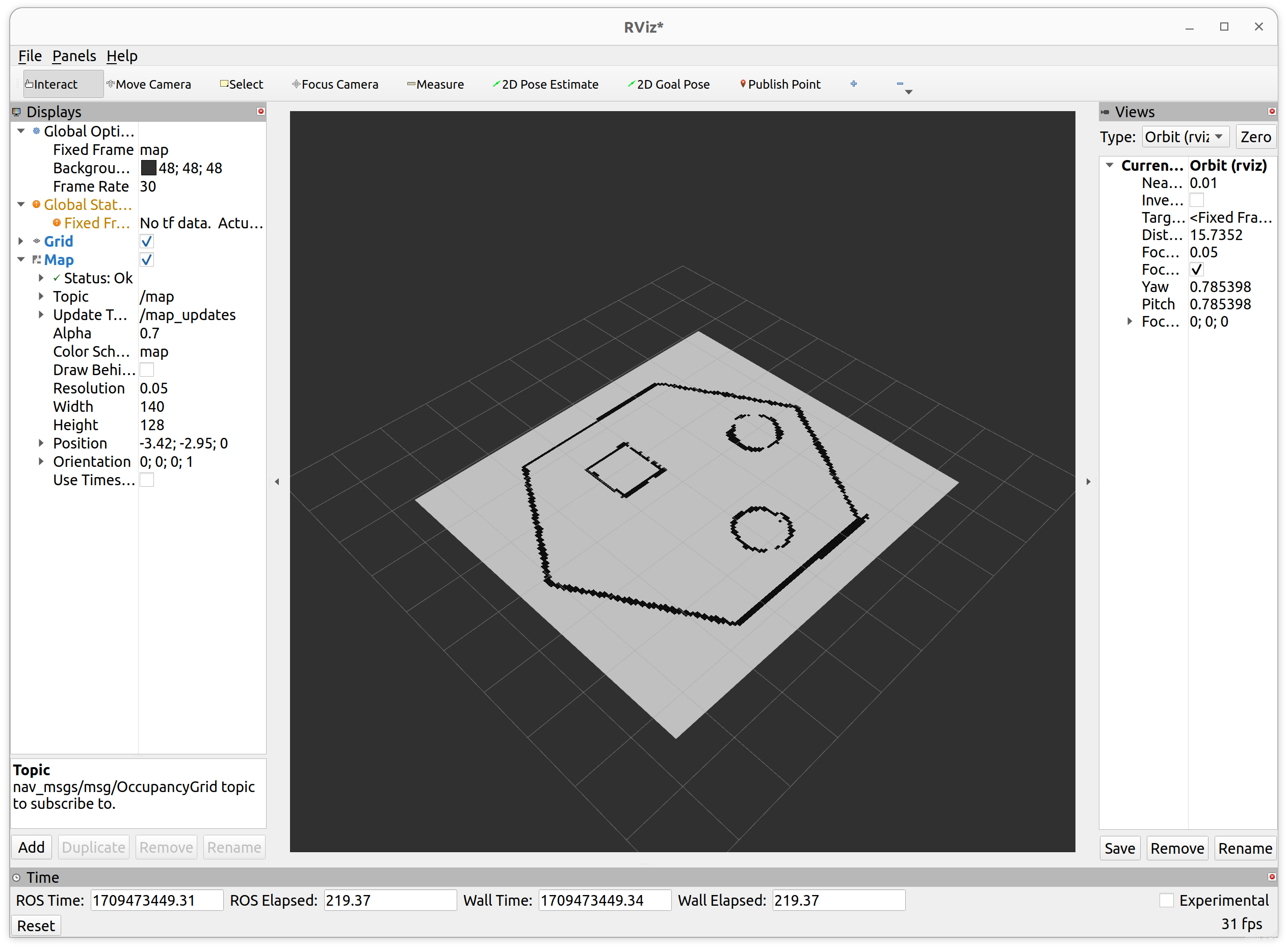
ros2的nav2_map_server导入地图时,rviz2显示no map received 步骤: 1、打开终端,进入src/map/运行下面指令: ros2 run nav2_map_server map_server --ros-args --param yaml_filename:=fishbot_map.yaml 2、打开rviz2 rviz2 通过add->bytop
【Nav2中文网】五、普通教程(六)动态对象追踪
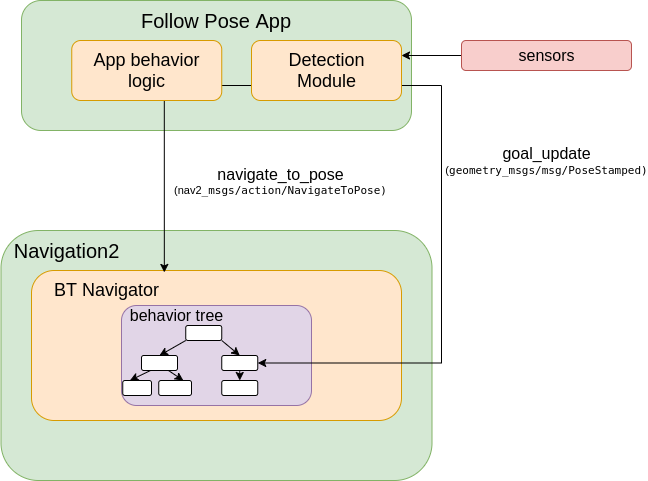
本教程来自:Nav2中文网Nav2交流社区:https://fishros.org.cn/forumROS2/Nav2千人交流群:(QQ)139707339更多精彩教程请关注微信公众号:鱼香ROS欢迎添加机器人小伊微信,解锁机器人学习特殊服务 动态对象追踪 [待校准@1238] 概述教程指南 概述 本教程展示了如何将Nav2用于从A点到B点以外的不同任务。在这种情况下,我们将使用Nav
Nav2通用教程-4
目录 Groot - Interacting with Behavior Trees Overview Visualize Behavior Trees Edit Behavior Trees Adding A Custom Node Camera Calibration相机标定 Overview Requirements Tutorial Steps Get Backtr

【ROS】Nav2源码之nav2_smoother(平滑器)详解
【ROS】郭老二博文之:ROS目录 1、简述 从路径规划模块’ nav2_planner '中给出路径通常是不平滑的。 所谓平滑器就是使规划的路径更平滑、平稳,可以运行的更优雅,并且减少硬件的磨损。 nav2_smoother在Nav2导航中的定义了平滑器接口的,nav2_smoother加载了一组平滑器插件,可以根据用户的定义,实现不同的平滑路径。 nav2_smoother主要实现了行为

【ROS】Nav2源码之nav2_behavior_tree详解
【ROS】郭老二博文之:ROS目录 1、简介 nav2_bt_navigator实现ROS2节点以行为树的方式来处理。 nav2_behavior_tree模块提供如下功能: 一个c++模板类,可以轻松地将ROS2 动作(actions)和服务(services)集成到行为树(Behavior Trees)中。特定于导航的行为树节点。通用的BehaviorTreeEngine类,简化了将B

【Nav2中文网】四、首次机器人安装指南(一)设置转换
本教程来自:Nav2中文网Nav2交流社区:https://fishros.org.cn/forumROS2/Nav2千人交流群:(QQ)139707339更多精彩教程请关注微信公众号:鱼香ROS欢迎添加机器人小伊微信,解锁机器人学习特殊服务 设置转换 [待校准@1866] 在本指南中,我们将了解 Nav2 所需的必要转换。这些转换允许 Nav2 解释来自各种来源的信息,例如传感器和里程计,
【ROS】Nav2源码之nav2_costmap_2d详解
【ROS】郭老二博文之:ROS目录 1、简述 nav2_costmap_2d包负责构建环境的2D成本图costmap,它由几个描述环境的“层(layers)”数据叠加而成。 它可以通过地图服务器或本地滚动窗口初始化,并通过从传感器获取观测数据来更新层。 nav2_costmap_2d也使用了插件,通过插件接口可以将层组合到成本图costmap中,并最终通过基于机器人足迹的膨胀半径进行膨胀。
【ROS】Nav2源码之nav2_planner详解
【ROS】郭老二博文之:ROS目录 1、简述 nav2_planner是路径规划器,把起始位置、姿势的信息输入nav2_planner模块,将会生成可行路径。 nav2_planner路径规划器和nav2_controller控制器相似,也使用插件的形式加载不同的路径规划器。 常用的路径规划器插件有: 1)NavFn Planner(使用 A* 或 Dijkstras 展开式的导航函数) 2)
【ROS】Nav2源码之nav2_controller详解
1、简述 nav2_controller(Nav2控制器)是Nav2中的任务服务器。根据 nav2_planner 模块计算出路径规划(全局路径或局部路径),生成速度、方向控制的命令(说白了就是控制机器人沿着找到的路走)。 nav2_controller生成速度、方向控制的命令的方法可以有多种,因此它设计成插件形式,可以使用现有的插件,比如“DWB Controller”“TEB Contro
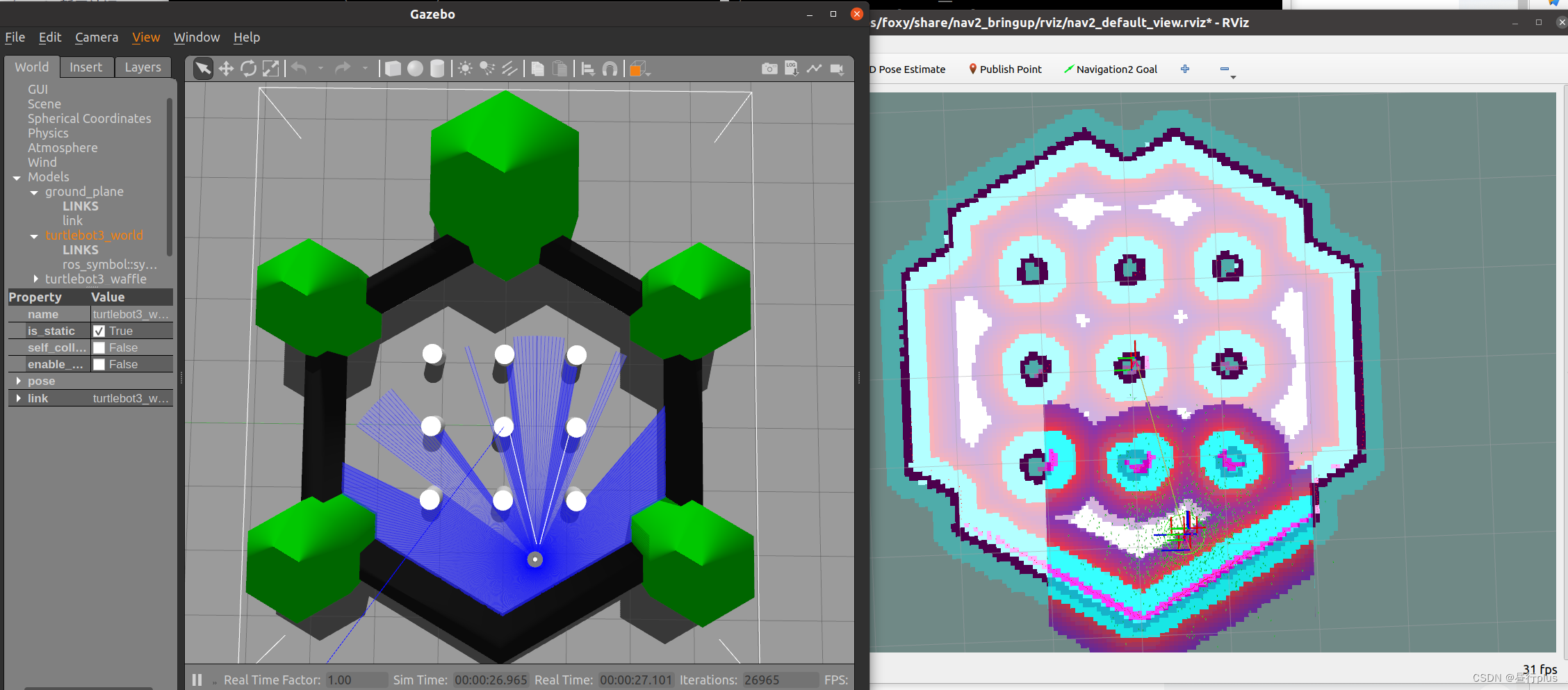
解决nav2_bringup tb3_simulation_launch.py 无法启动Gazebo的问题
方法 1 断网再开gazebo. 评价: 方便且有效, 但来回联网很麻烦 参考: https://blog.csdn.net/James___H/article/details/116906217 方法 2 断网能打开是因为gazebo软件开启时会自动从网络下载模型,下载过程必然漫长, 另外你懂的, 网络问题嘛, vpn也解决不了的话就基本无解了。 Step 1 所以我们可以在本地提前