本文主要是介绍Nature | 解锁大脑运动控制机理!哈佛大学与DeepMind实现「AI大脑」控制虚拟老鼠,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
近日,哈佛大学的研究人员与谷歌DeepMind AI 实验室合作,开发出了一种虚拟大鼠模型,以研究大脑如何控制真实老鼠的运动。这个创新的模型准确地模拟了在真实大鼠身上观察到的神经活动,可以用于探讨大脑是如何控制动物的运动行为。
该重磅研究《A virtual rodent predicts the structure of neural activity across behaviors》已于 2024 年 6 月 11 日发布在《Nature》。
尽管机器人技术取得了重大进展,但模仿动物和人类运动的流畅性仍然是一项挑战。参与该项目的哈佛研究生迭戈·阿尔达隆多(Diego Aldarondo)强调了硬件和软件方面的障碍。
他表示,硬件和软件领域都存在挑战。在硬件方面,研究人员努力在机器人中复制动物身体的灵活性、稳健性和能效。另一方面,软件方面的障碍包括开发有效的物理模拟和机器学习管道,以训练控制器准确地模仿人类运动。
由于物理模拟器和现实世界条件之间的差异,这使得在模拟中学习到的控制器向真实机器人的转移变得复杂。
开发虚拟老鼠模型
研究人员之所以与谷歌DeepMind 合作,是因为该公司在训练人工神经网络(ANN)方面具有专长,能够在物理模拟器中控制动物的生物力学模型。
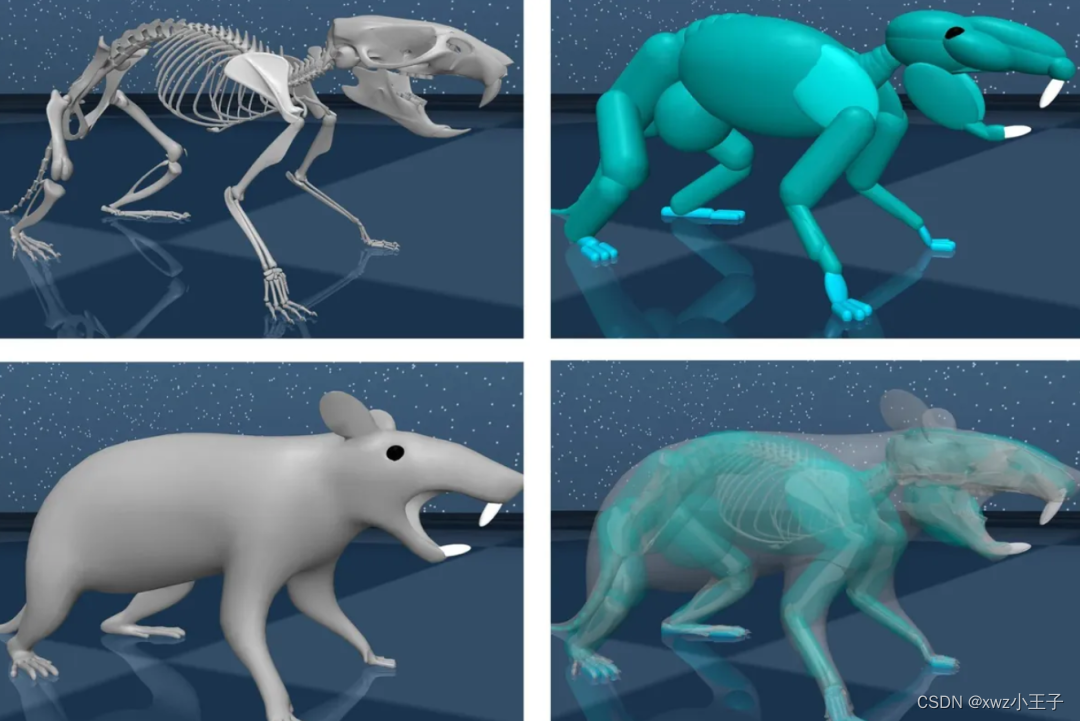
虚拟老鼠
哈佛大学教授Ölveczky说:“DeepMind已经开发出了一条训练生化试剂在复杂环境中移动的管道。我们根本没有资源来运行这样的模拟,来训练这些网络。”
他们利用了MuJoCo,这是一个复制重力和其他物理力的物理模拟器。他们设计了一个名为"运动模仿与控制(MIMIC)"的新管道来训练 ANN 模仿老鼠的行为。
他们从真实老鼠身上获得的详细数据对 ANN 进行了训练。Aldarondo强调了这一进步对神经科学的重要性,因为它促进了在物理模拟中模拟动物运动的计算模型的发展。
使用 MIMIC 比较行为范围内的生物控制和人工控制

根据Ölveczky教授的说法,这个生物力学三个逼真的数字模型代表了理解大脑如何控制运动的一个重大突破。
这使得预测真实大脑中的神经活动模式成为可能。利用人工神经网络,研究人员构建了反向动态模型,据信我们的大脑利用这些模型指导身体运动,并从当前的身体状态过渡到预期状态。
Aldarondo 解释说,简单来讲,一个反向模型决定了在考虑身体物理的情况下,达到特定姿势所必需的肌肉激活。这个框架在运动神经科学中被证明是有价值的,因为它需要学习如何通过与环境的相互作用来适应一个人的身体特征。

从真实的老鼠身上收集的信息帮助虚拟模型理解产生达到特定状态的预期运动所需的力,即使没有对它们进行直接训练也是如此。
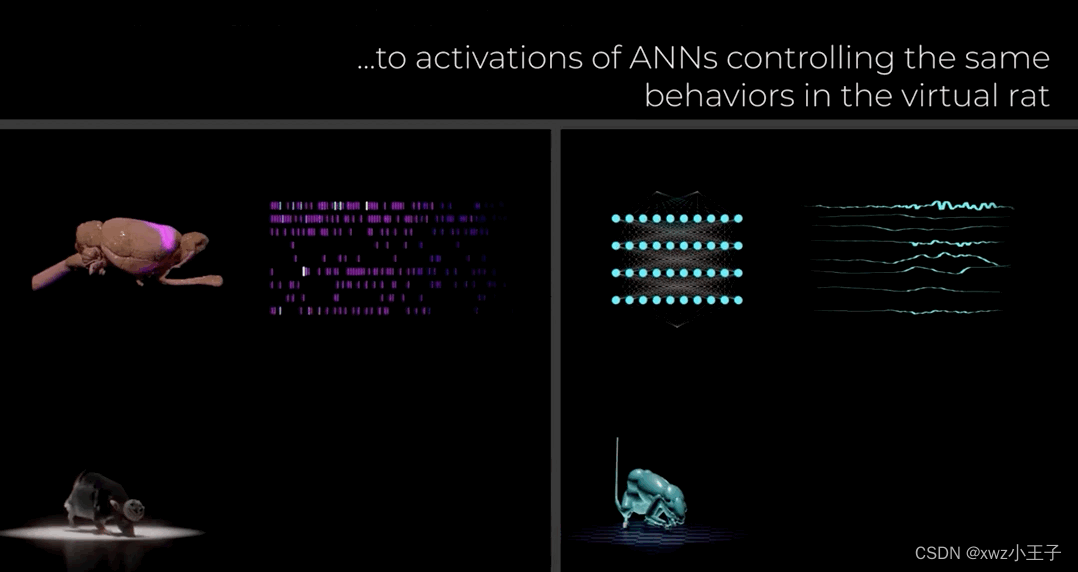
通过测量真实老鼠和虚拟模型的神经活动,研究人员发现虚拟模型精确地预测了在真实老鼠中观察到的神经活动。
这标志着虚拟神经科学新时代的开始,人工智能模拟动物可用于研究神经回路,并探索它们如何受到各种疾病的影响。
这篇关于Nature | 解锁大脑运动控制机理!哈佛大学与DeepMind实现「AI大脑」控制虚拟老鼠的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





