本文主要是介绍永磁同步直线电机(PMLSM)控制与仿真4-永磁同步直线电机数学三环闭环控制仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、参数设置及脚本
- 2、相电流波形
- 3、位置波形
- 4、速度波形
- 5、控制电流波形
- 6、永磁同步直线电机在实际控制中如何控制
- 参考
写在前面:原本为一篇文章写完了永磁同步直线电机数学模型介绍,永磁同步直线电机数学模型搭建,以及永磁同步直线电机三环参数整定及三环仿真模型搭建,但因为篇幅较长,所以分开写。
永磁同步直线电机数学模型
永磁同步直线电机数学模型搭建
永磁同步直线电机数学三环控制整定
永磁同步直线电机数学三环闭环控制仿真
1、参数设置及脚本
电机参数:
PMLSM.r=2.6;
PMLSM.Ld=0.0267;
PMLSM.Lq=0.0267;
PMLSM.pole=2;
PMLSM.M=0.5;
PMLSM.B=0;
PMLSM.tau=0.018;
PMLSM.flux=0.24;
模型总览:
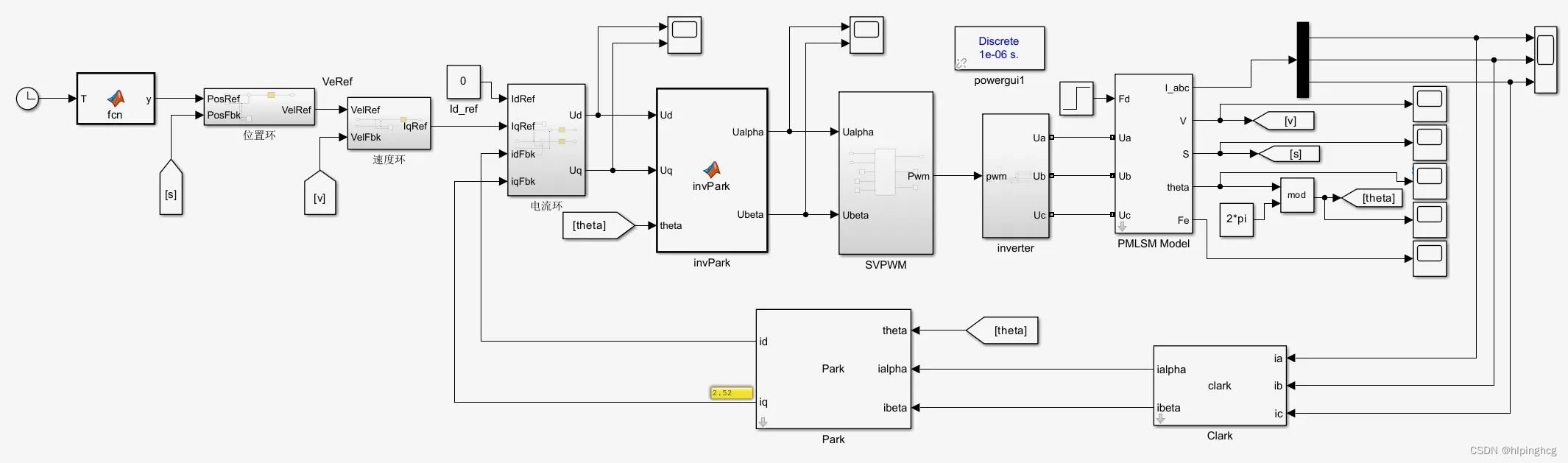
模型下载地址: 永磁同步直线电机三闭环控制simulink仿真模型
三环参数计算脚本:
function fcn()%----------------------------------------基本参数--------------------------------------------------------%
Ts=0.0001;%电机参数
PMLSM.r=2.6;
PMLSM.Ld=0.0267;
PMLSM.Lq=0.0267;
PMLSM.pole=2;
PMLSM.M=0.5;
PMLSM.B=0;
PMLSM.tau=0.018;
PMLSM.flux=0.24;%----------------------------------------PI等参数计算--------------------------------------------------------%
%由反电动势常数计算磁链
%flux=10*sqrt(6)*Ke/(pi*pole);
% r : 欧姆
% LS:H%电流环PI计算
kcpd=PMLSM.Ld/(2*Ts);
tau_d=PMLSM.Ld/PMLSM.r;
kcpq=PMLSM.Lq/(2*Ts);
tau_q=PMLSM.Lq/PMLSM.r;
kci_d=Ts/tau_d;
kci_q=Ts/tau_q;%速度环PI计算
h=5;
tau_v=h*2*Ts;
kvp=PMLSM.tau*PMLSM.M*(h+1)/(3*pi*PMLSM.pole*PMLSM.flux*2*h*Ts);
kvi=Ts/tau_v;%位置环P计算
kpp=1/(4*Ts*kvp);%----------------------------------------数据打印--------------------------------------------------------%
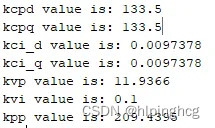
str='kcpd value is: ';
str=[str,num2str(kcpd)];
disp(str);str='kcpq value is: ';
str=[str,num2str(kcpq)];
disp(str);str='kci_d value is: ';
str=[str,num2str(kci_d)];
disp(str);str='kci_q value is: ';
str=[str,num2str(kci_q)];
disp(str);str='kvp value is: ';
str=[str,num2str(kvp)];
disp(str);str='kvi value is: ';
str=[str,num2str(kvi)];
disp(str);str='kpp value is: ';
str=[str,num2str(kpp)];
disp(str);
计算结果
参数对应的PID控制脚本:
function Out = PID(Err, Kp, Ki, Kd, OutMax, OutMin, Kc)persistent UpLast;
if isempty(UpLast)UpLast = 0;
endpersistent UiLast;
if isempty(UiLast)UiLast = 0;
endpersistent OutPreSatLast;
if isempty(OutPreSatLast)OutPreSatLast = 0;
endpersistent OutLast;
if isempty(OutLast)OutLast = 0;
end%Err = Ref - Fbk;Up = Kp * Err;Ui = UiLast + Ki * Up + Kc * (OutLast - OutPreSatLast);Ud = Kd * (Up - UpLast);OutPreSat = Up + Ui + Ud;if (OutPreSat > OutMax)Out = OutMax;
elseif(OutPreSat < OutMin)Out = OutMin;
elseOut = OutPreSat;
endUpLast = Up;
UiLast = Ui;
OutPreSatLast = OutPreSat;
OutLast = Out;
位置给定:
function y = fcn(T)y=sin(2*pi*T);
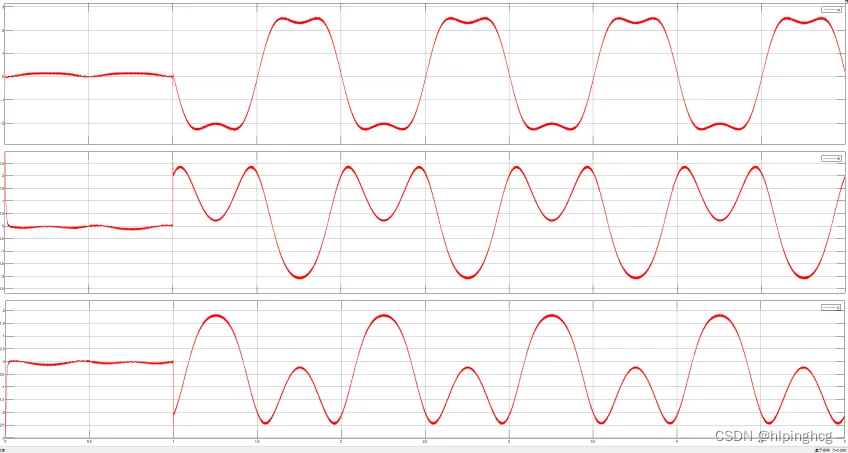
2、相电流波形
ia,ib,ic波形(1s时加载)
3、位置波形
位置给定与位置反馈波形:
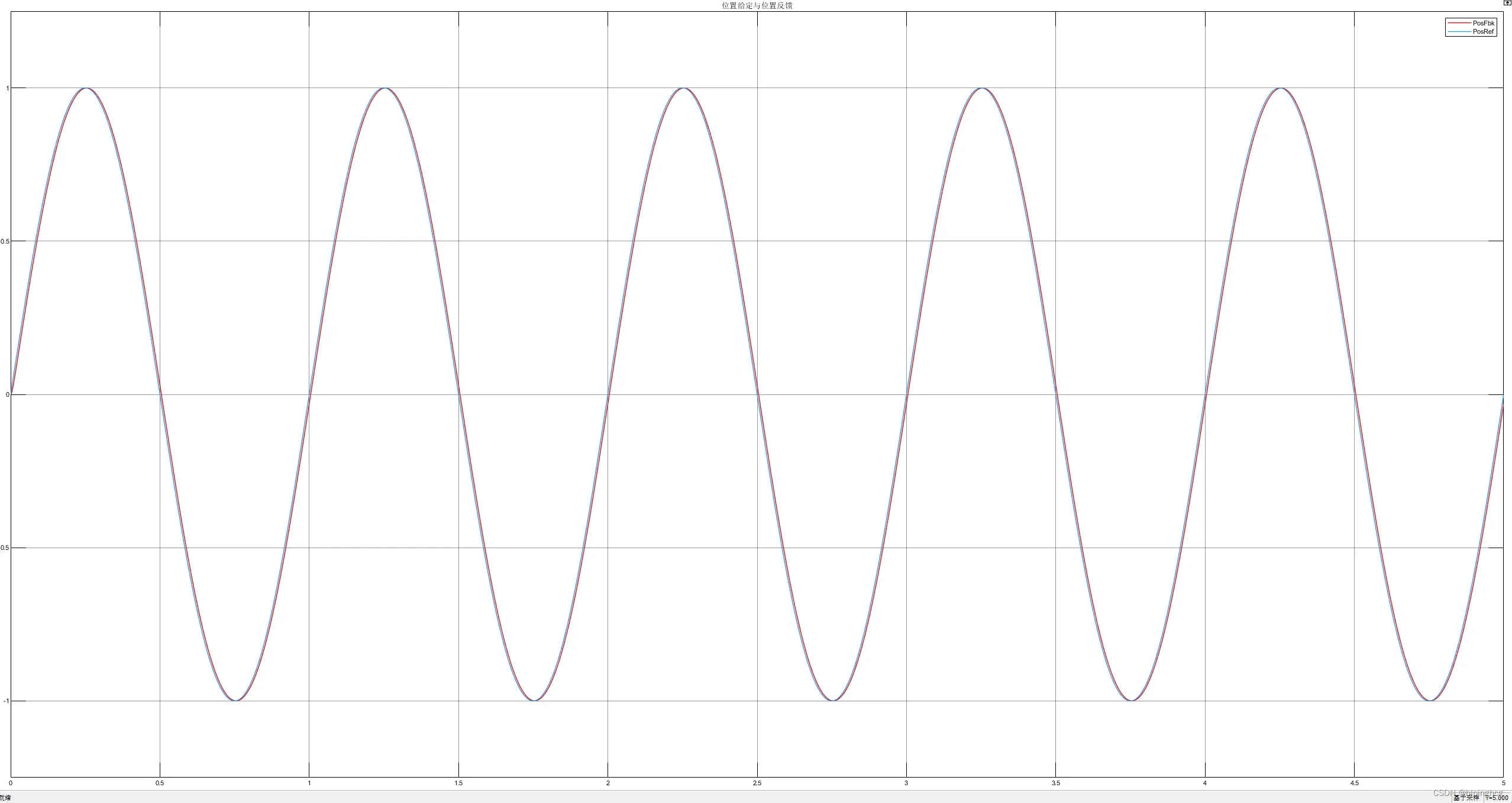
局部放大:
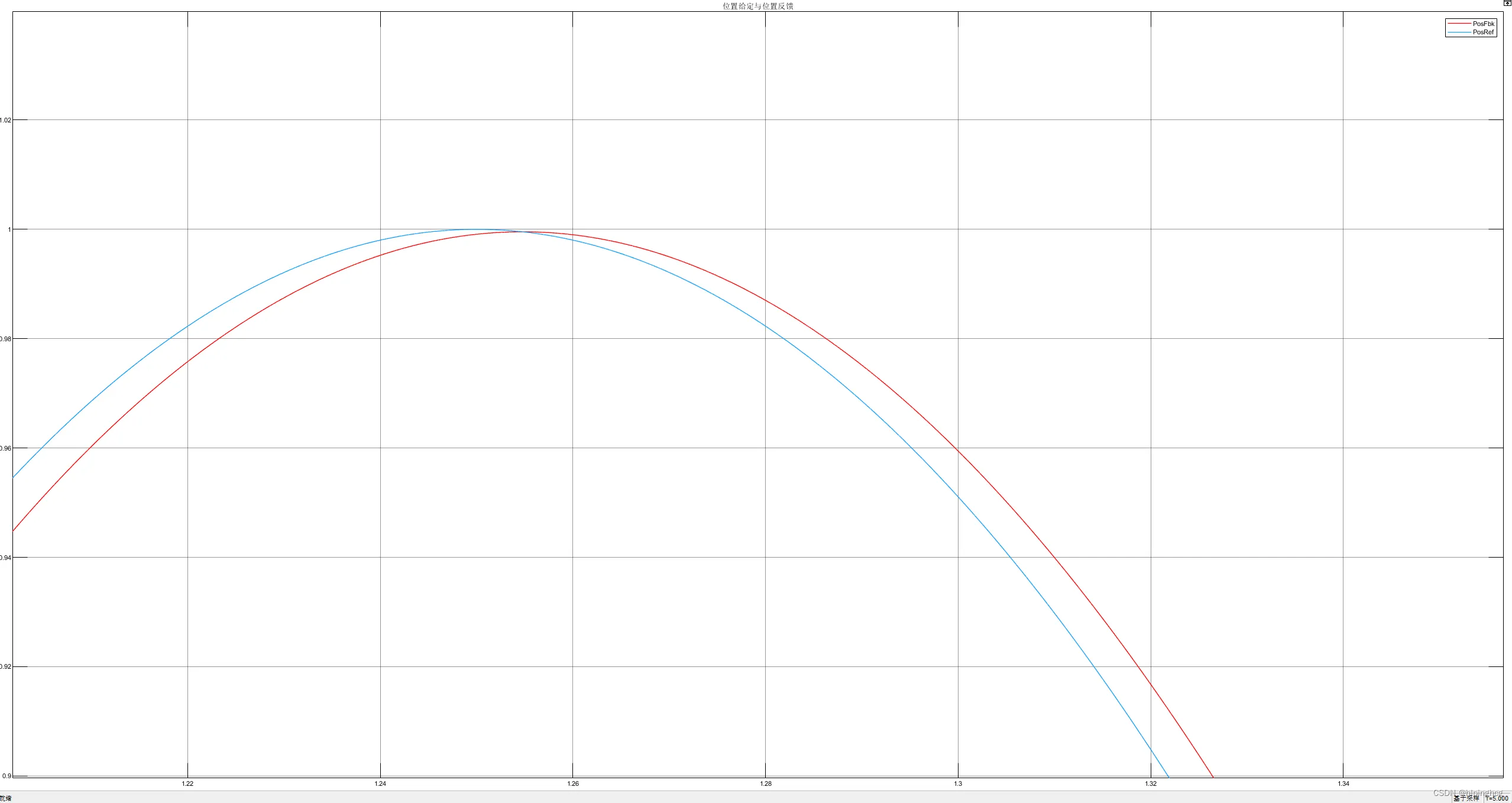
依然存在一定的误差,但已经很小了
4、速度波形
速度给定与速度反馈
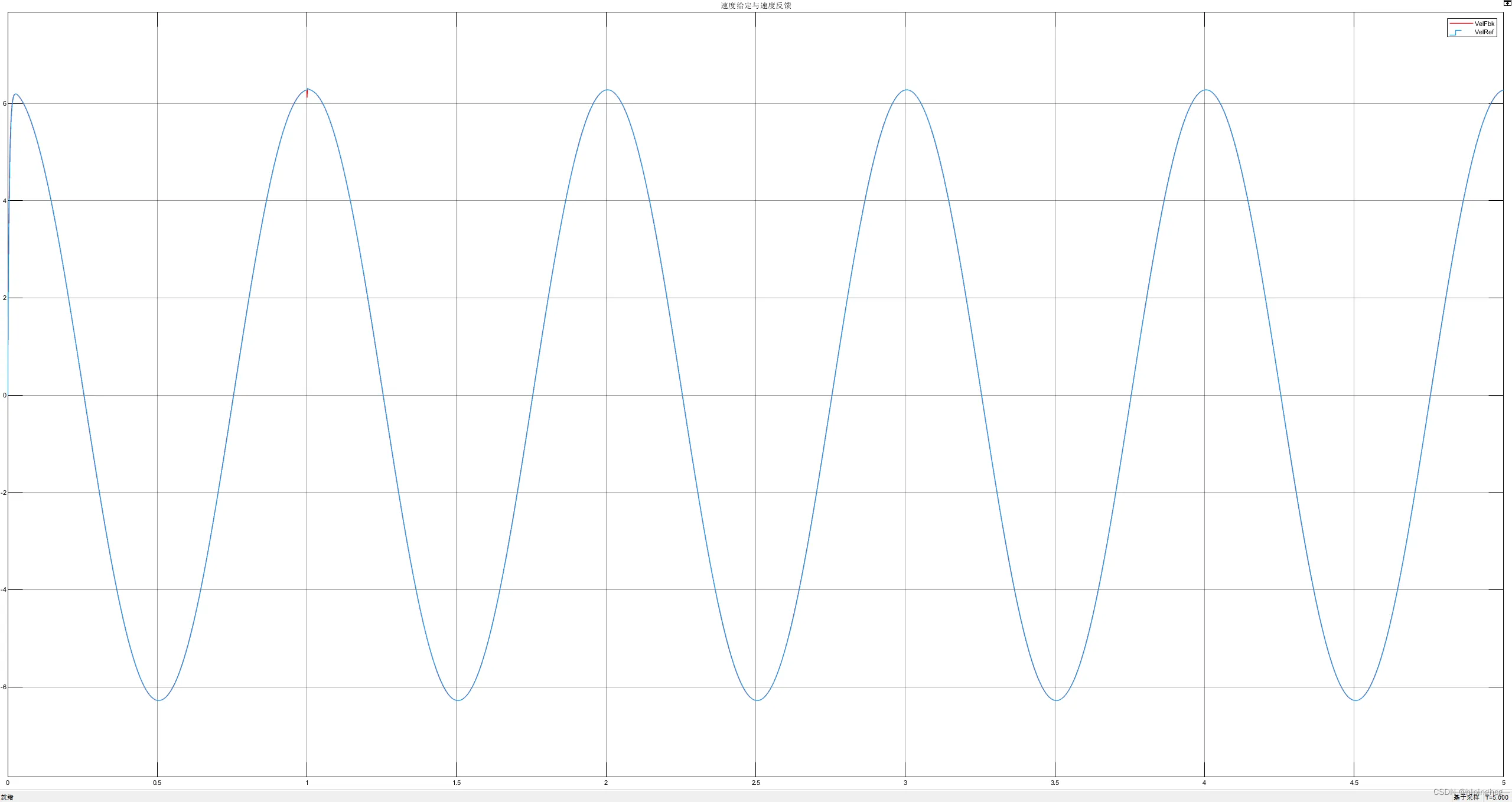
局部放大
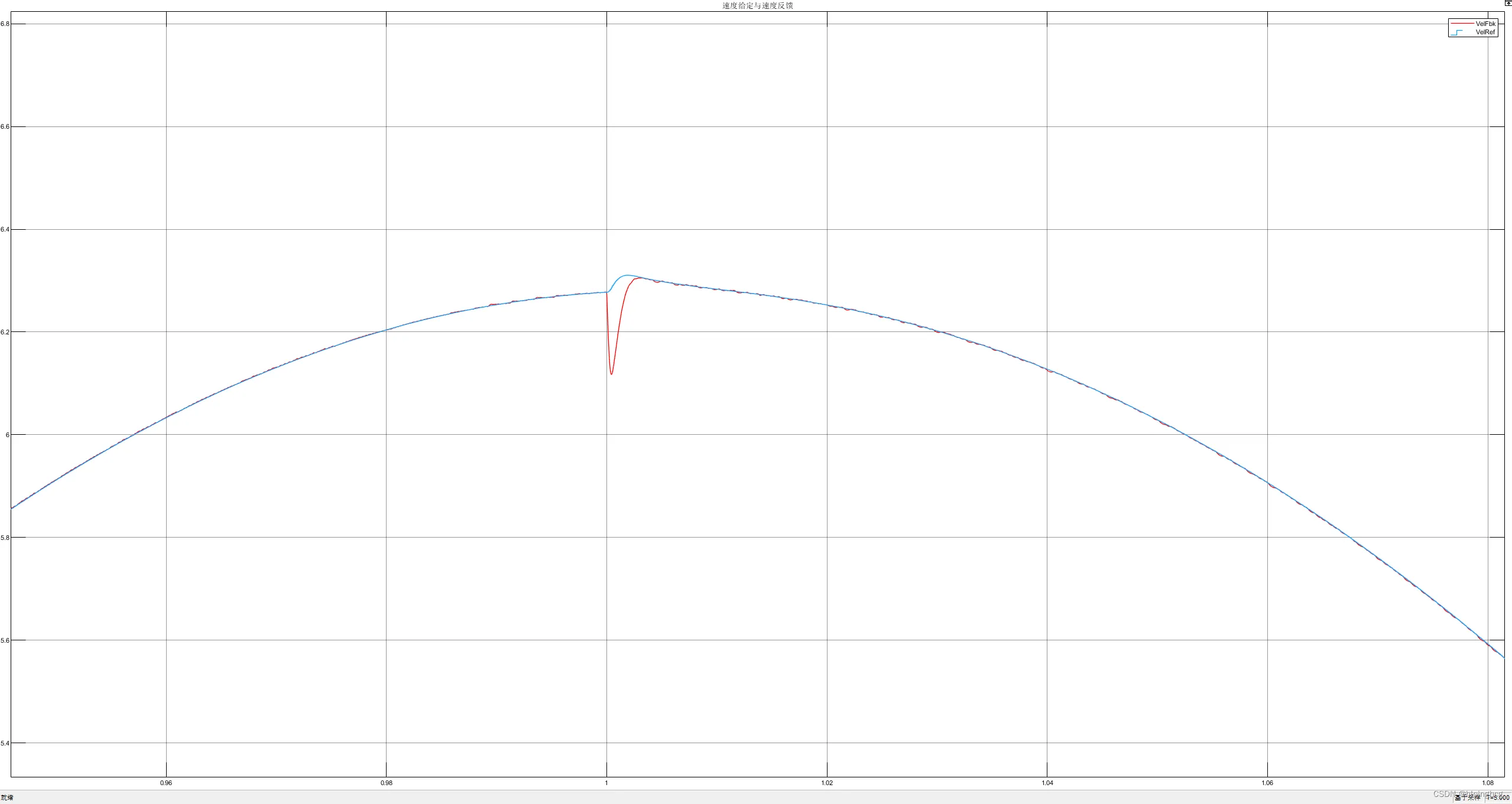
可以看到速度跟随效果好,在1s时因为突加载缘故,速度有一定波动,但很快收敛。
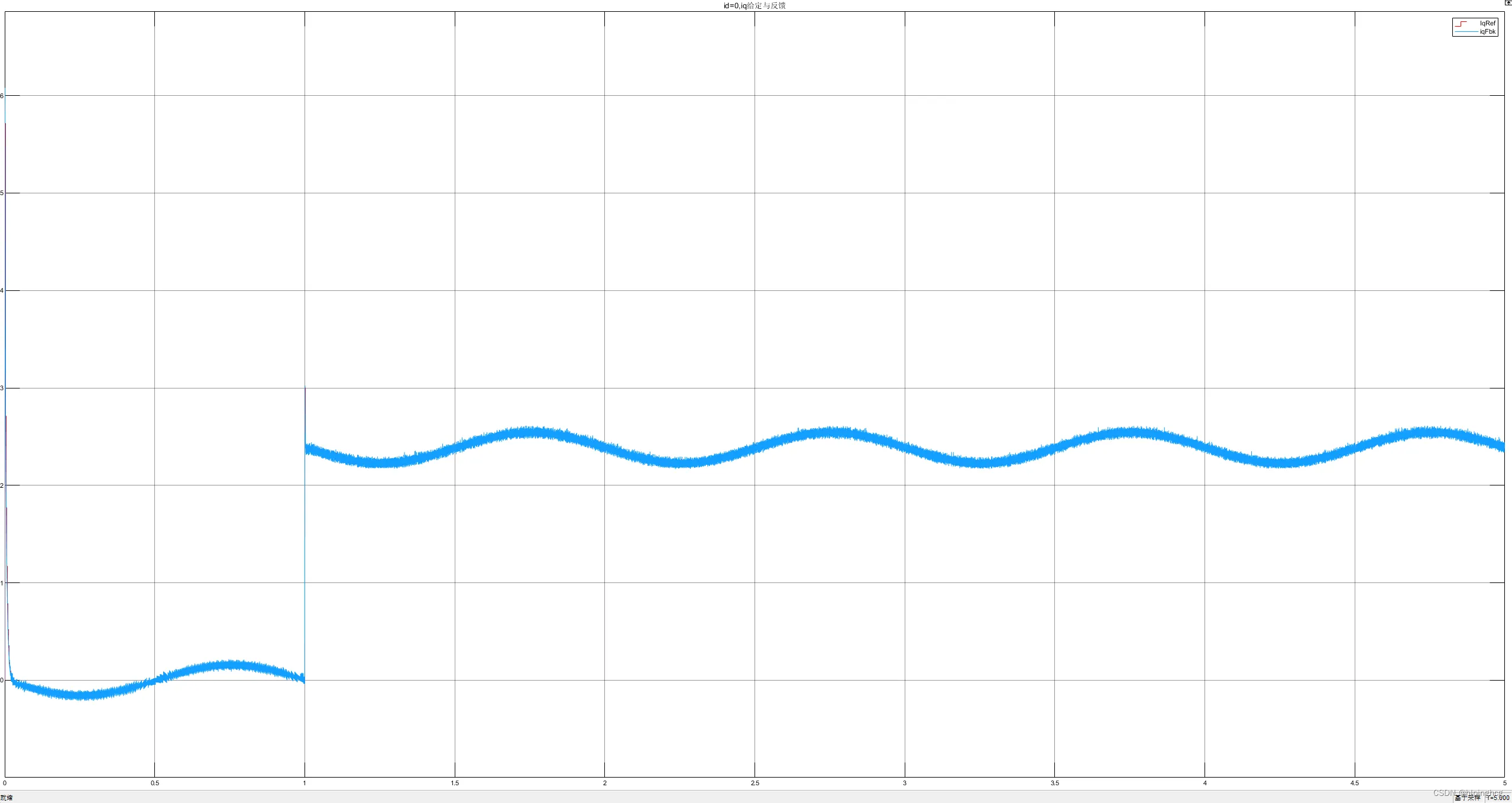
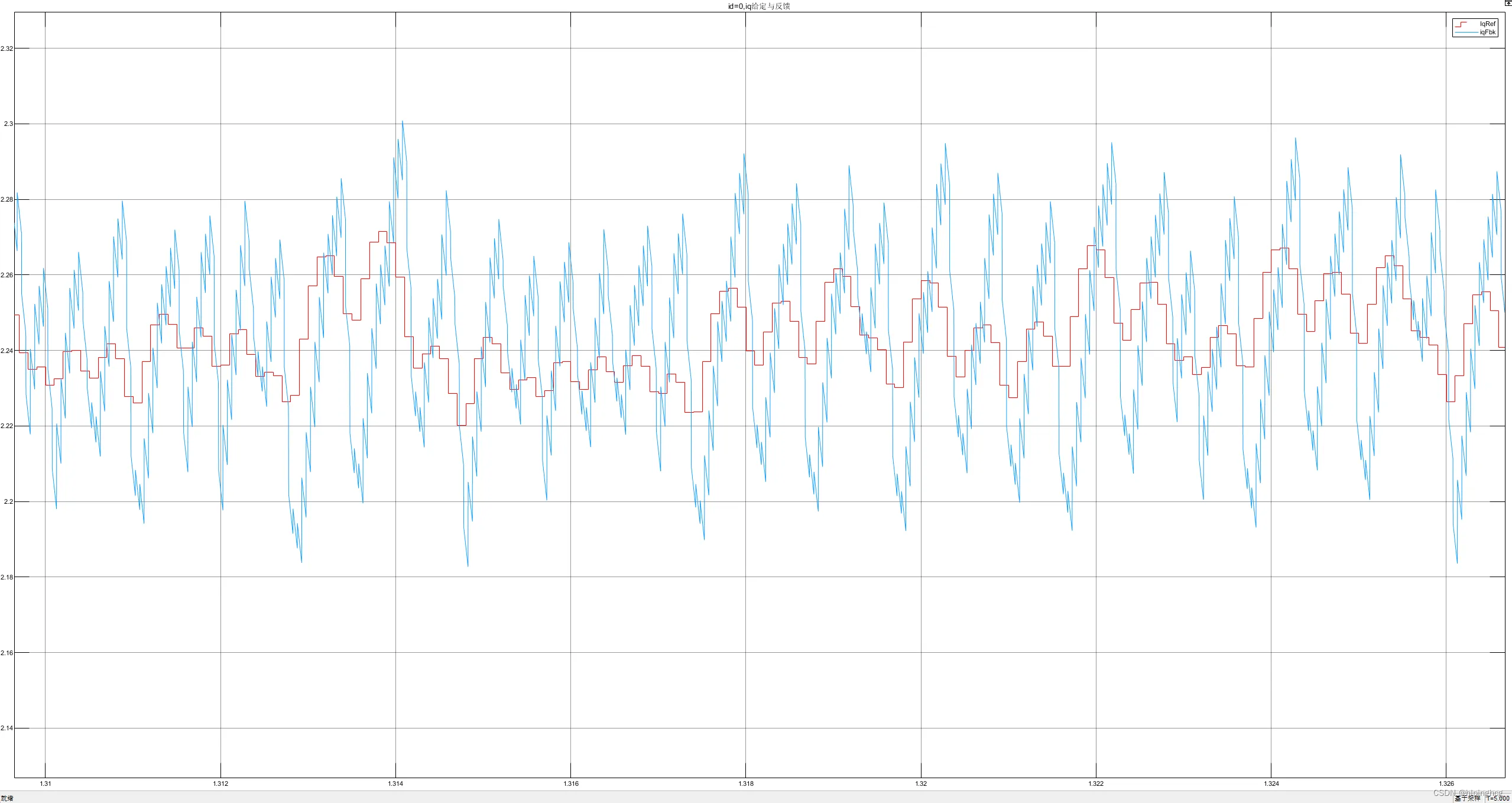
5、控制电流波形
id=0的控制策略下,iq给定与反馈波形(1s时加载)
局部放大
6、永磁同步直线电机在实际控制中如何控制
在实际过程中永磁同步直线电机的控制与PMSM的控制方式一样,也采用FOC控制,只是有有几个参数不一样和运行方式有一点差异。
PMSM有感控制与PMLSM有感控制只有一个极对数和分辨率,已经运动方式的区别。
● PMSM的ABZ编码器反馈,脉冲反馈,4096线(16384脉冲),PMLSM的 1 u m 1um 1um,2000脉冲,极距 16 m m 16mm 16mm,那么等同于PMSM的ABZ编码器反馈,脉冲反馈,32000脉冲,也就是分辨率,于是两种电机就做到统一。
● PMSM的极对数一般为多对极,PMLSM一般为1对极。
● PMSM为旋转运动,可一个方向旋转或点到点的运动,PMLSM为直线运动,且一般为点到点的来回运动。
至此整篇文章结束。
参考
【1】唐传胜. 永磁同步直线电机控制方法研究[D].电子科技大学,2016.
【2】杜朝相. 永磁同步直线电机控制策略研究[D].北方工业大学,2022.DOI:10.26926/d.cnki.gbfgu.2021.000031.
【3】沈蛟骁. 基于STM32的永磁同步直线电机控制系统的研究[D].东南大学,2017.
【4】朱飞辉. 基于模糊PID控制的永磁同步直线电机伺服控制系统研究与实现[D].南华大学,2015.
【5】龙如意. 高精度直线电机模型辨识及控制研究[D].哈尔滨工业大学,2016.
【6】董思兴. 永磁同步直线电机无位置传感器动子位置估计研究[D].安徽大学,2016.
【7】张雷明. 永磁同步直线电机中的滑模控制技术研究[D].南京师范大学,2017.
【8】张代林. 永磁同步直线电机伺服系统的控制策略和实验研究[D].华中科技大学,2009.
【9】林春. 永磁同步直线电机伺服控制系统研究[D].浙江大学,2005.
【10】孙宗宇. 永磁同步直线电机的矢量控制[D].兰州理工大学,2009.
【11】刘杰. 永磁同步直线电机驱动系统的仿真研究[D].广东工业大学,2011.
【12】郑俊. 基于DSP的永磁同步直线电机伺服系统的设计与研究[D].广东工业大学,2012.
【13】张勇.永磁直线同步电机伺服控制系统研究[D].浙江大学,2014.
这篇关于永磁同步直线电机(PMLSM)控制与仿真4-永磁同步直线电机数学三环闭环控制仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








