闭环控制专题
LCL滤波器并网逆变器双闭环控制系统仿真
并网逆变器通常采用L滤波器,虽然结构和控制简单,但是随着功率级别的增加,体积重量增大等问题也日益突出。为了解决这个问题,人们开始使用LCL滤波器,这种滤波器在功率较大的场合表现出色。 无源滤波器,又称LC滤波器,是一种利用电感、电容和电阻的组合设计构成的滤波电路,可滤除某一次或多次谐波。最普通易于采用的无源滤波器结构是将电感与电容串联。 外环采用输出电流反馈。内环则有多种方式,下面主要基于电容
永磁同步直线电机(PMLSM)控制与仿真4-永磁同步直线电机数学三环闭环控制仿真
文章目录 1、参数设置及脚本2、相电流波形3、位置波形4、速度波形5、控制电流波形6、永磁同步直线电机在实际控制中如何控制参考 写在前面:原本为一篇文章写完了永磁同步直线电机数学模型介绍,永磁同步直线电机数学模型搭建,以及永磁同步直线电机三环参数整定及三环仿真模型搭建,但因为篇幅较长,所以分开写。 永磁同步直线电机数学模型 永磁同步直线电机数学模型搭建 永磁同步直线电机数学三环控制

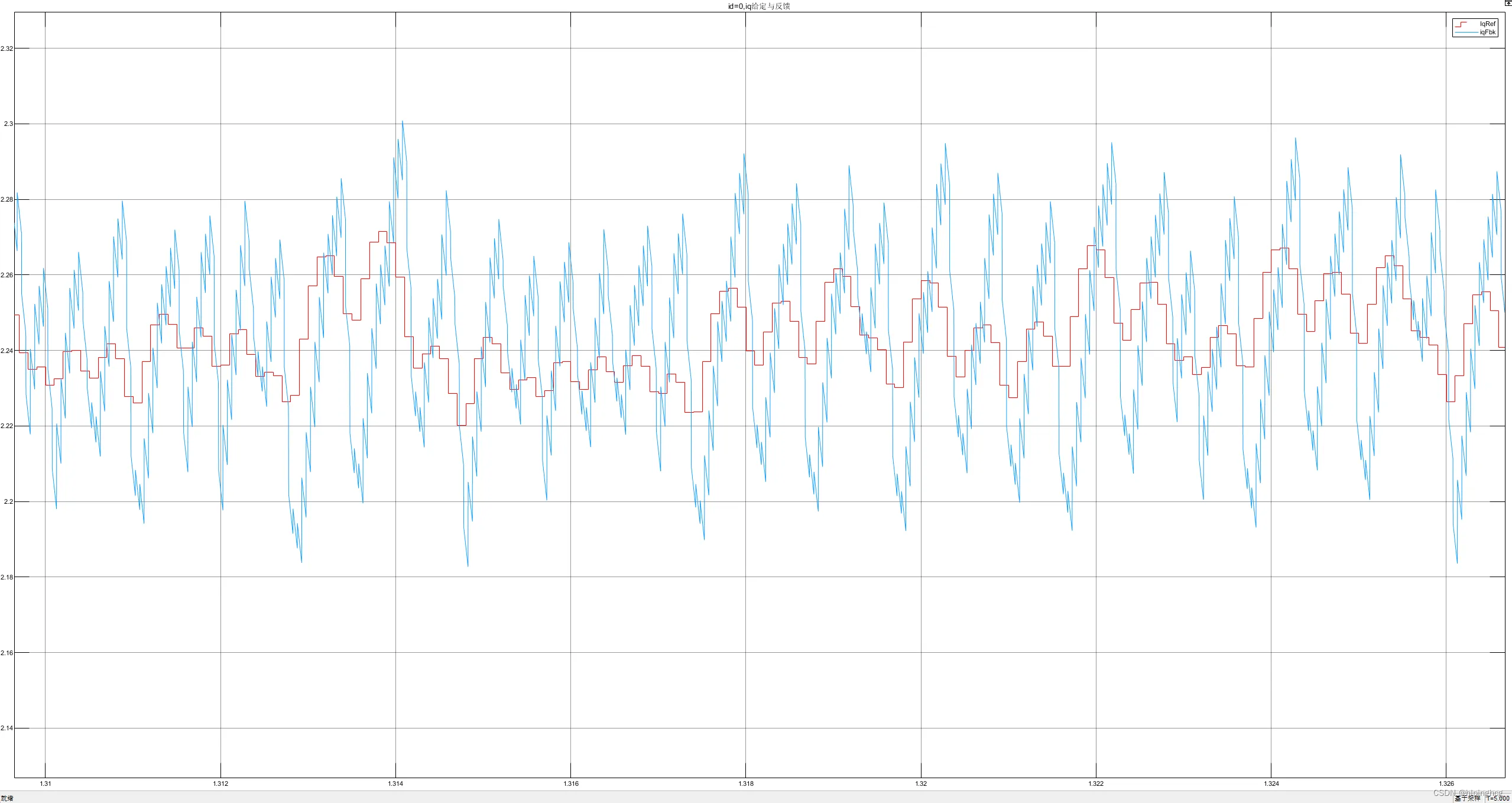
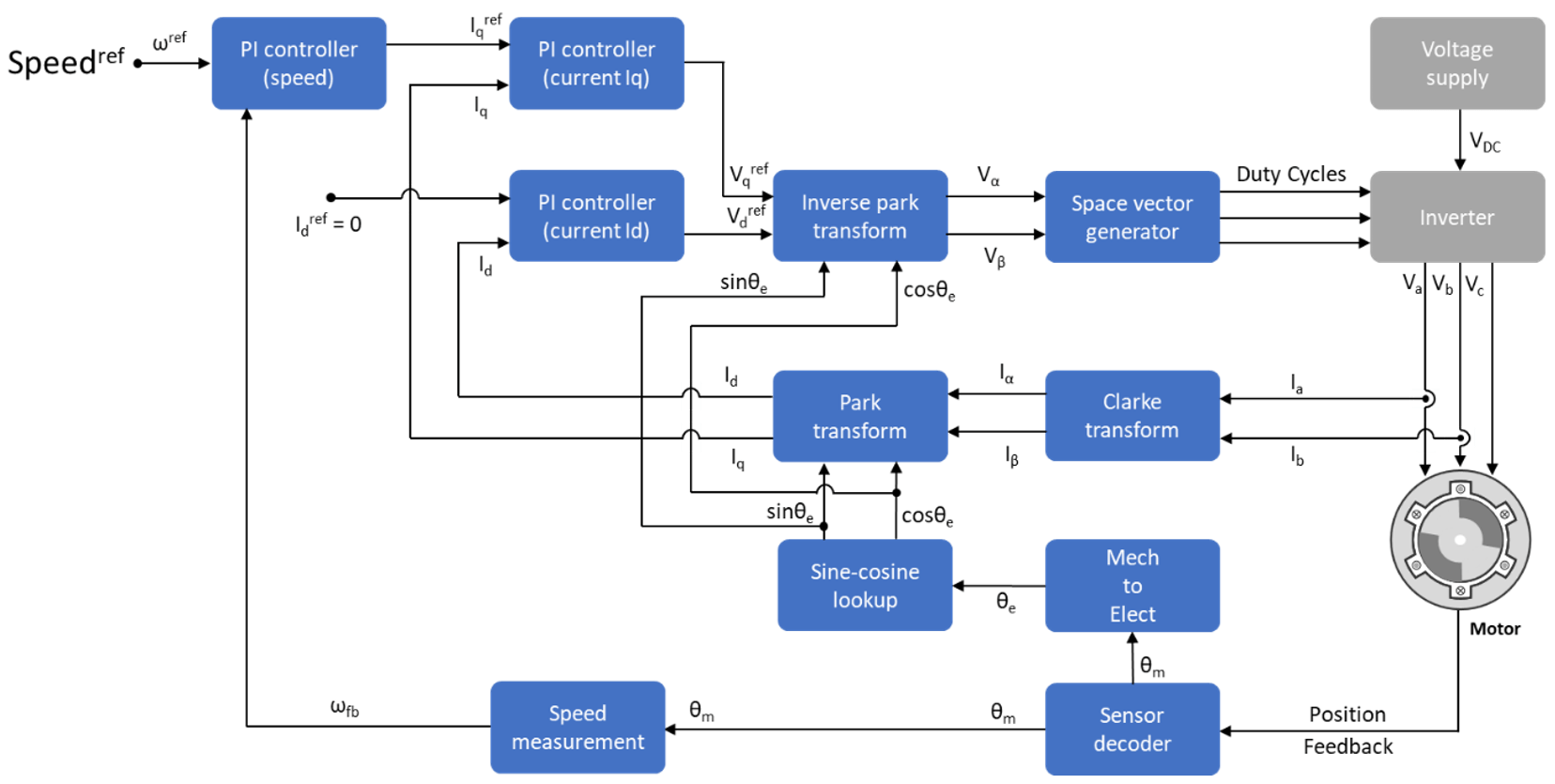
基于双PI结构FOC闭环控制的永磁同步电机控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于双PI结构FOC闭环控制的永磁同步电机控制系统simulink建模与仿真。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 64 4.系统原理简介 永磁同步电机(PMSM)基于双PI结构的磁场定向
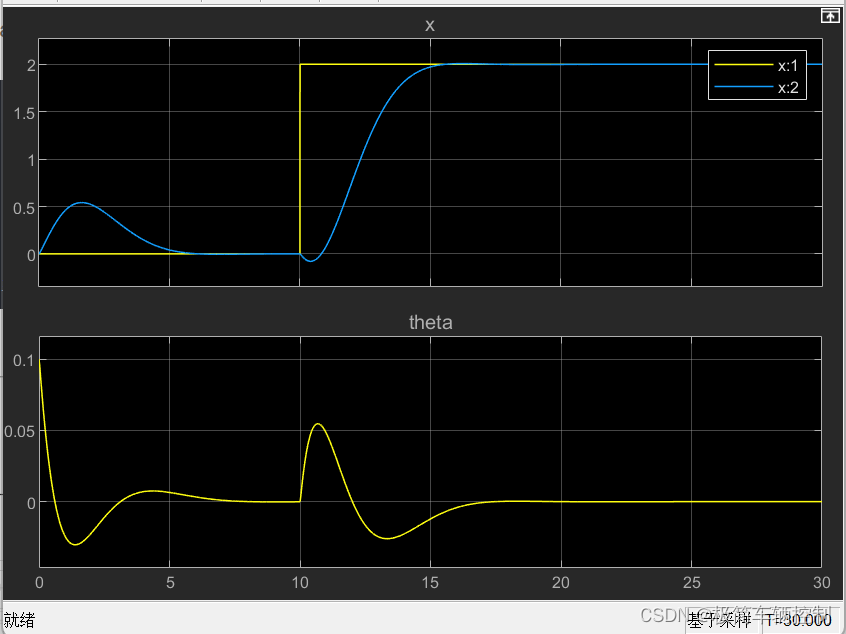
小车倒立摆系统极点配置,LQR闭环控制
在之前直流电机控制仿真里有讲过状态控制的基本架构,有兴趣的同学可以再回去看看,链接如下好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_lqr控制器观测器-CSDN博客 在专栏的前三篇文章 小车倒立摆物理建模与simulink仿真-CSDN博客 小车倒立摆系统线性化,离散化处理-CSDN博客 小车倒立摆系统能控和能观性分析-CSDN博客 我们建立的小车的状态空间方
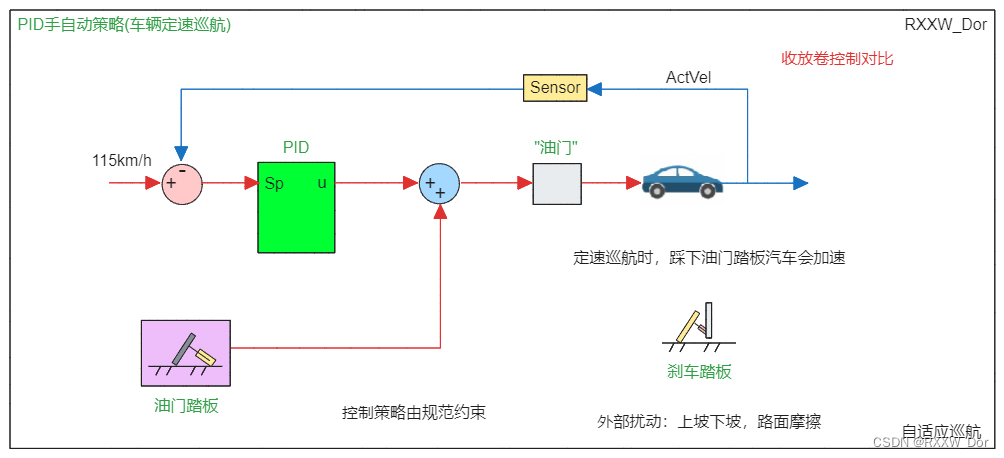
闭环控制系统手自动策略(车辆定速巡航应用)
闭环控制系统的手自动策略并不会完全一样,不同的行业,基于不同的规范和安全考虑给出的手自动策略是不一样的,这里我们介绍汽车行业定速巡航应用。 PID闭环控制系统手自动切换的相关文章,还可以查看下面链接: 无扰切换的速度式PID https://rxxw-control.blog.csdn.net/article/details/130750146https://rxxw-control.blo
电机的开环控制和闭环控制
目录 开环电机控制 闭环电机控制 开环到闭环转换 开环电机控制 开环控制(也称为标量控制或伏特/赫兹控制)是一种常见的电机控制方法,可用于运行任何交流电机。这是一种简单的方法,不需要来自电机的任何反馈。为了保持定子磁通恒定,我们需要保持电源电压振幅与其频率成比例。 上图显示的是一个开环控制系统。电源电路包含一个由直流电源供电的 PWM 电压馈电逆
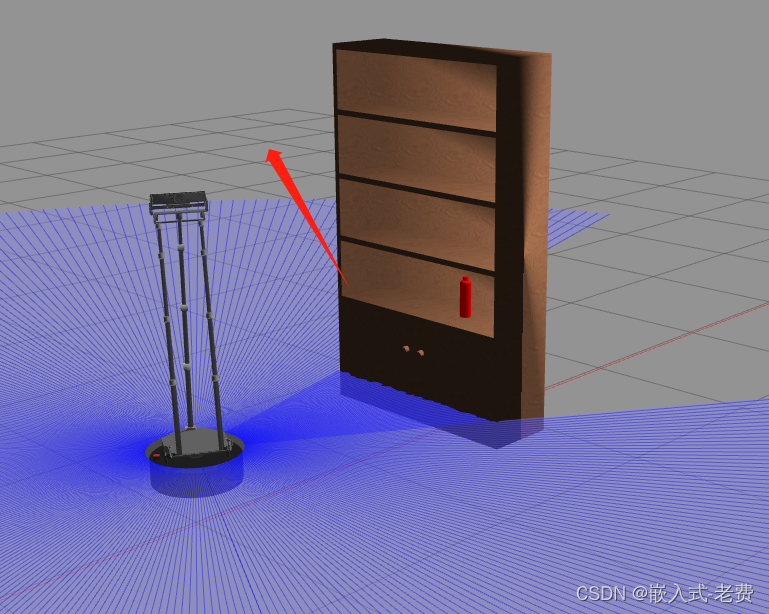
SLAM从入门到精通(基于传感器的闭环控制仿真)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】 前面我们对底盘做了控制,对传感器数据也进行了读取,但是目前为止还没有做过一个完整的ros仿真程序。在这仿真中,有必要既涉及传感器,也涉及底盘控制。所以,这里做一个简单的robot绕障系统。它的基本原理很简单,就是如果没有发现障碍物,那么小车就继续向前走。一旦发现障碍物,小车
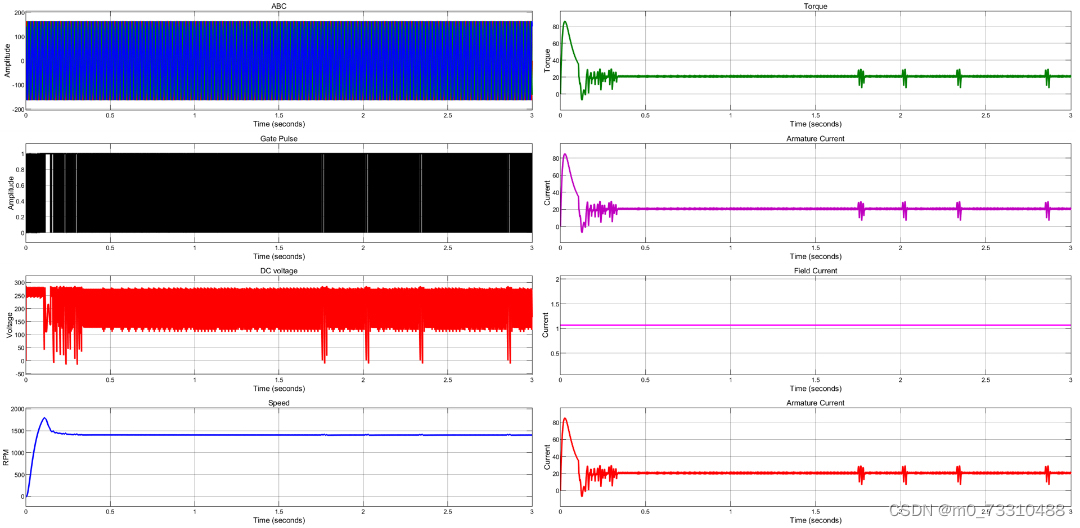
基于MATLAB/Simulink的直流电机电枢闭环控制系统仿真模型
DC_Machine_Armature_Control:基于MATLAB/Simulink的直流电机电枢闭环控制系统仿真模型。 仿真条件:MATLAB/Simulink R2015b ID:6840650770413102Silence
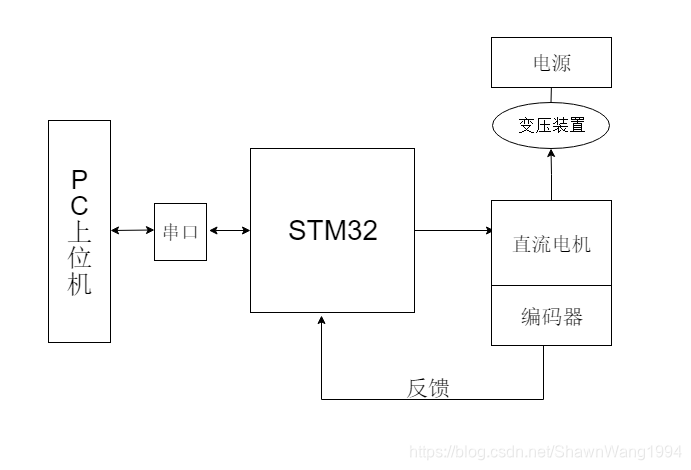
基于STM32F407单片机对双直流电机的pid闭环控制(有代码)
直流电机简介 直流电动机是将直流电能转换为机械能的电动机。因其良好的调速性能而在电力拖动中得到广泛应用。直流电动机按励磁方式分为永磁、他励和自励3类,其中自励又分为并励、串励和复励3种。 当直流电源通过电刷向电枢绕组供电时,电枢表面的N极下导体可以流过相同方向的电流,根据左手定则导体将受到逆时针方向的力矩作用;电枢表面S极下部分导体也流过相同方向的电流,同样根据左手定则导体也将受到逆时针方向的力
六、ROS小车闭环控制:实现过程中的一些经验总结(C语言微积分,读写文档)
--------------------------------------------------------------------闲白区---------------------------------------------------------------------------- 继续围绕闭环谈谈遇到的一些问题和解决办法。由于我的工作还没做完,虽然不是很复杂,也暂时不能公开所有内容

锁相热像无损检测技术中的正弦波温度闭环控制解决方案
摘要:针对目前锁相红外热成像无损检测中存在被检物温度偏离标准正弦波形式的检测模型,以及被检物温度无法准确控制和快速达到稳定的问题,本文提出了改进解决方案。解决方案的核心是将现有的激励光源开环控制模式改进为闭环控制,具体采用了具有远程设定点功能的PID温度控制器,将现有光源的正弦波功率调制改进为直接的被检物表面温度正弦波调制,由此更符合理论模型,且可使被检物平均温度快速达到稳定而大幅缩短检测

基于STM32F103C8T6使用Arduino IDE编程闭环控制4个带编码器的有刷直流电机
题记:标题有点长了,纯粹为了方便被检索到~~~本贴主要用于支持南方科技大学SDIM学院工业设计专业大三综合项目移动底盘学习,也是我自己按照费曼学习方法的一次尝试,用从底层搭建一个机器人底盘来学习自动控制原理。 由于工业设计专业没有开设嵌入式课程,多数同学不具备使用Keil或STM32CubeIDE的基础。鉴于Arduino开发的友好性(主要是参考资料多),特使用支持Ardui

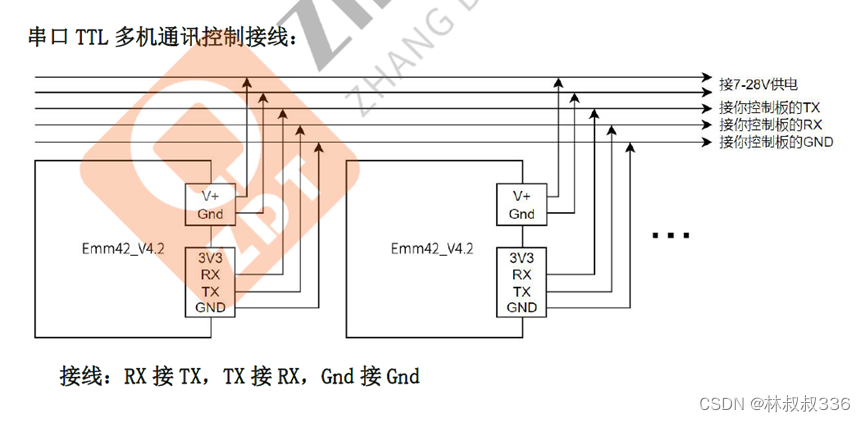
步进闭环控制、速度控制(张大头Emm_V4.2驱动器)速度控制——Arduino
目录 前言 一、接线 二、代码 前言 步进电机的精准控制是一个比较麻烦的事,要是不想深入学习电机控制而且又有精准控制的需求的话,可以在某宝搜买闭环驱动器,这里我使用的是张大头42步进电机闭环控制器,“可恶”的是up主没有在他的例程中提供函数,然后自己写了一个,供大家参考,也望大家批评指正。 一、接线 这个支撑多个电机挂在一个usa
曲线拟合(MATLAB拟合工具箱)位置前馈量计算(压力闭环控制应用)
利用PLC进行压力闭环控制的项目背景介绍请查看下面文章链接,这里不再赘述。 信捷PLC压力闭环控制应用(C语言完整PD、PID源代码)_RXXW_Dor的博客-CSDN博客闭环控制的系列文章,可以查看PID专栏的的系列文章,链接如下:张力控制之速度闭环(速度前馈量计算)_RXXW_Dor的博客-CSDN博客张力控制的开环闭环算法,专栏有系列文章介绍这里不再赘述。具体链接如下:PLC张力控制(开环
曲线拟合(MATLAB拟合工具箱)位置前馈量计算(压力闭环控制应用)
利用PLC进行压力闭环控制的项目背景介绍请查看下面文章链接,这里不再赘述。 信捷PLC压力闭环控制应用(C语言完整PD、PID源代码)_RXXW_Dor的博客-CSDN博客闭环控制的系列文章,可以查看PID专栏的的系列文章,链接如下:张力控制之速度闭环(速度前馈量计算)_RXXW_Dor的博客-CSDN博客张力控制的开环闭环算法,专栏有系列文章介绍这里不再赘述。具体链接如下:PLC张力控制(开环
【OpenAI】Python:基于 Gym-CarRacing 的自动驾驶项目(4) | 车辆控制功能的实现 | 开环控制 | 闭环控制 | 启停式控制 | PID 控制 | Stanley 控制器
猛戳!跟哥们一起玩蛇啊 👉 《一起玩蛇》🐍 💭 写在前面:本篇是关于多伦多大学自动驾驶专业项目的博客。GYM-Box2D CarRacing 是一种在 OpenAI Gym 平台上开发和比较强化学习算法的模拟环境。它是流行的 Box2D 物理引擎的一个版本,经过修改以支持模拟汽车在赛道上行驶的物理过程。模块化组件 (Modular Pipeline) 分为 低层次感知与场景解析