本文主要是介绍基于STM32F407单片机对双直流电机的pid闭环控制(有代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
直流电机简介
直流电动机是将直流电能转换为机械能的电动机。因其良好的调速性能而在电力拖动中得到广泛应用。直流电动机按励磁方式分为永磁、他励和自励3类,其中自励又分为并励、串励和复励3种。
当直流电源通过电刷向电枢绕组供电时,电枢表面的N极下导体可以流过相同方向的电流,根据左手定则导体将受到逆时针方向的力矩作用;电枢表面S极下部分导体也流过相同方向的电流,同样根据左手定则导体也将受到逆时针方向的力矩作用。这样,整个电枢绕组即转子将按逆时针旋转,输入的直流电能就转换成转子轴上输出的机械能。由定子和转子组成,定子:基座,主磁极,换向极,电刷装置等;转子(电枢):电枢铁心,电枢绕组,换向器,转轴和风扇等。

PWM调速方法
在步进电机控制系统中可以通过输人PWM波的方法来对步进电动的运动进行控制。PWM波的产生可以通过时钟频率、自动重装值等参数进行设置,从而调节PWM波的占空比和输出频率。
脉冲宽度调制(PWM),是英文“Pulse Width Modulation” 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。简单一点,就是对脉冲宽度的控制, PWM 原理如图: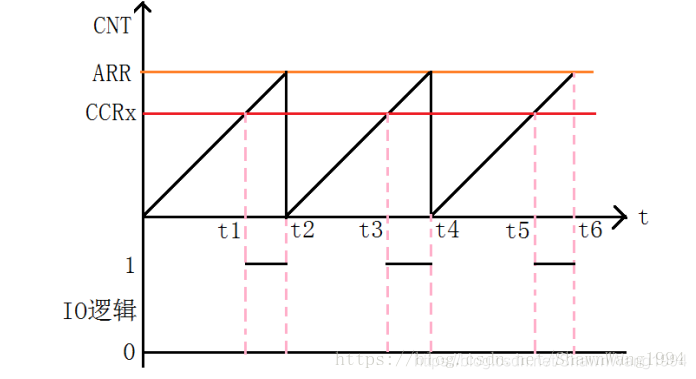
我们假定定时器工作在向上计数 PWM模式,且当 CNT小于CCRx 时,输出 0,当 CNT大于等于CCRx 时输出 1。那么就可以得到如上的 PWM示意图:当 CNT 值小于 CCRx 的时候, IO 输出低电平(0),当 CNT 值大于等于 CCRx 的时候,IO 输出高电平(1),当 CNT 达到 ARR 值的时候,重新归零,然后重新向上计数,依次循环。改变 CCRx 的值,就可以改变 PWM 输出的占空比,改变 ARR 的值,就可以改变 PWM 输出的频率,这就是 PWM 输出的原理。
通过控制脉冲占空比来改变电机的电枢电压.改变占空比的方法有3种:(1)定宽调频法,这种方法是保持t1不变,只改变t2,这样周期(T或频率)也随之改变;(2)调宽调频法,保持t1不变,而改变t2,这样也使周期T(或频率)改变;(3)定频调宽法,这种方法是使周期(T或频率)不变,而同时改变t1和t2.由于前两利,方法都改变了周期(或频率),当控制频率与系统的固有频率接近时,将会引起振荡,用的比较少,因此本系统用的是定频调宽法.在脉冲作用下,当电机通电时,速度增加.电机断电时,速度逐渐减小.只要按一定规律,改变通断电时间,即可实现对电机的转速控制。
电机选型
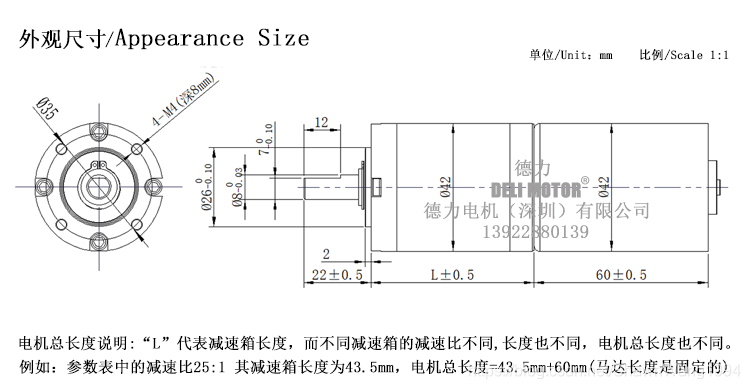
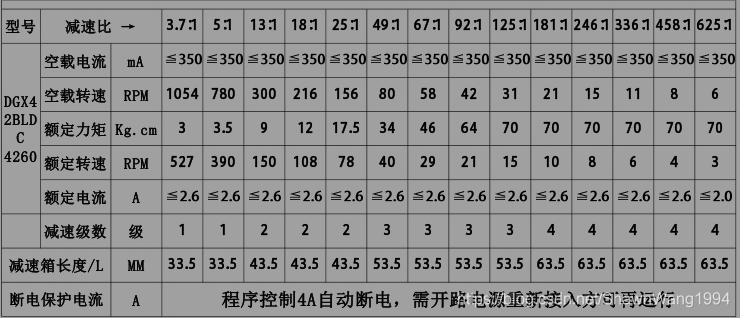
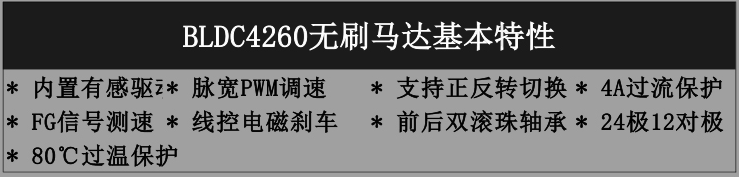
电机选的是——德力电机DGX42BLDC4260直流无刷行星减速电机大扭力马达。
品牌: DELI MOTOR
型号: DGX42BLDC4260
产地: 中国大陆
电源方式: 直流电
电压: 36V
电压: DC 12V/24V
功率: 30W
级数: 1/2/3/4
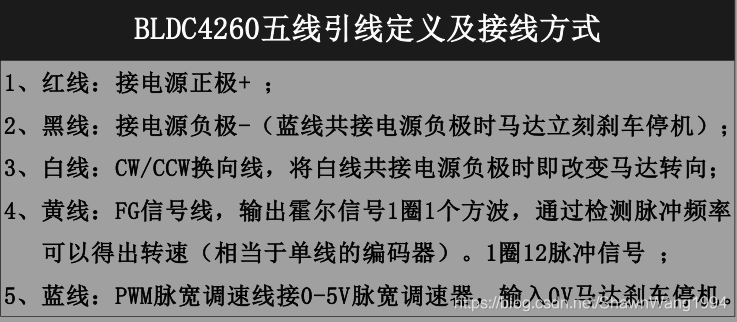
刹车: 自带线控电磁刹车(蓝色引线)
极数: 24极12对极(即1圈12个脉冲…)

电机实验平台的搭建
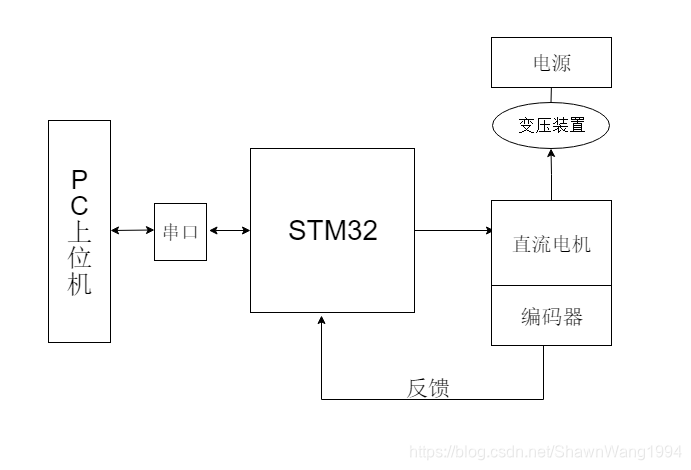
运用STM32F407定时器TIM2和TIM4的PWM功能分别驱动两个直流电机运动;运用串口通信将电机的实时转速反馈到PC上位机上,可利用串口调试助手获取实验数据;通过编码器对电机进行闭环控制,可将电机的实时转速反馈给主控芯片。
运用STM32F407定时器TIM2和TIM4的PWM功能分别驱动两个直流电机运动
,相关代码如下:
void TIM2_IRQHandler(void)
{static uint32_t last_rising_1 = 0;if(TIM2->SR&TIM_FLAG_Update) // 溢出中断{// 溢出中断的处理CountFlags1++;}if(TIM2->SR&TIM_FLAG_CC1){// 正确捕获uint32_t tempccr = TIM2->CCR1;uint32_t correctCount = 0;if (CountFlags1 == 0){correctCount = tempccr - last_rising_1;last_rising_1 = tempccr;}else{correctCount = 0xffff * CountFlags1 - last_rising_1 + tempccr;last_rising_1 = tempccr;CountFlags1 = 0;}if(correctCount != 0)MotorFrequency_1 = 8 * 2000000 / correctCount;}TIM_ClearITPendingBit(TIM2, TIM_IT_Update|TIM_IT_CC1);
}void TIM4_IRQHandler(void)
{static uint32_t last_rising_2 = 0;if(TIM4->SR&TIM_FLAG_Update) // 溢出中断{// 溢出中断的处理CountFlags2++;}if(TIM4->SR&TIM_FLAG_CC1){// 正确捕获uint32_t tempccr = TIM4->CCR1;uint32_t correctCount = 0;if (CountFlags2 == 0){correctCount = tempccr - last_rising_2;last_rising_2 = tempccr;}else{correctCount = 0xffff * CountFlags2 - last_rising_2 + tempccr;last_rising_2 = tempccr; CountFlags2 = 0;}if(correctCount != 0)MotorFrequency_2 = 8 * 2000000 / correctCount;}TIM_ClearITPendingBit(TIM4, TIM_IT_Update|TIM_IT_CC1);
}/*函数:定时器2、3、4通道1输入捕获配置,把定时器2、3、4配置成计数器模式,选择外部时钟为外部时钟1模式
*/
void wheel_init(void)
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_ICInitTypeDef TIM_ICInitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA | RCC_AHB1Periph_GPIOB, ENABLE); //使能GPIOA、GPIOB时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2 | RCC_APB1Periph_TIM4, ENABLE); //使能TIM2.3.4时钟/*TIM2_CH1 -- PA5 / TIM3_CH1 -- PA6 / TIM4_CH1 -- PB6*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure这篇关于基于STM32F407单片机对双直流电机的pid闭环控制(有代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




