本文主要是介绍步进闭环控制、速度控制(张大头Emm_V4.2驱动器)速度控制——Arduino,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
前言
一、接线
二、代码
前言
步进电机的精准控制是一个比较麻烦的事,要是不想深入学习电机控制而且又有精准控制的需求的话,可以在某宝搜买闭环驱动器,这里我使用的是张大头42步进电机闭环控制器,“可恶”的是up主没有在他的例程中提供函数,然后自己写了一个,供大家参考,也望大家批评指正。

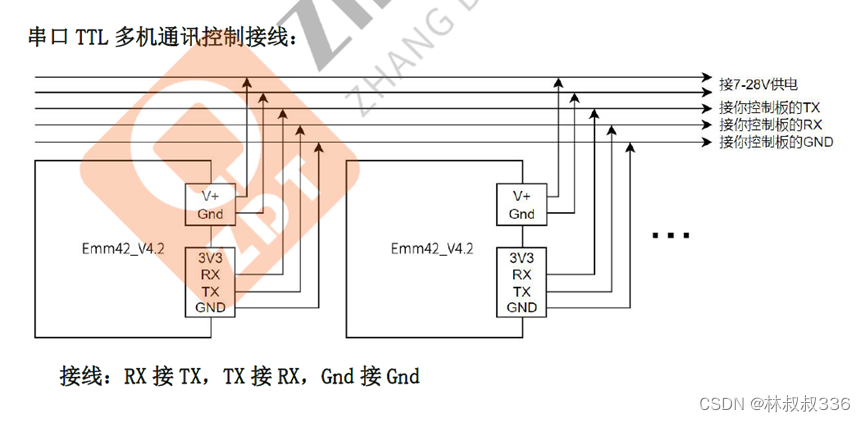
一、接线
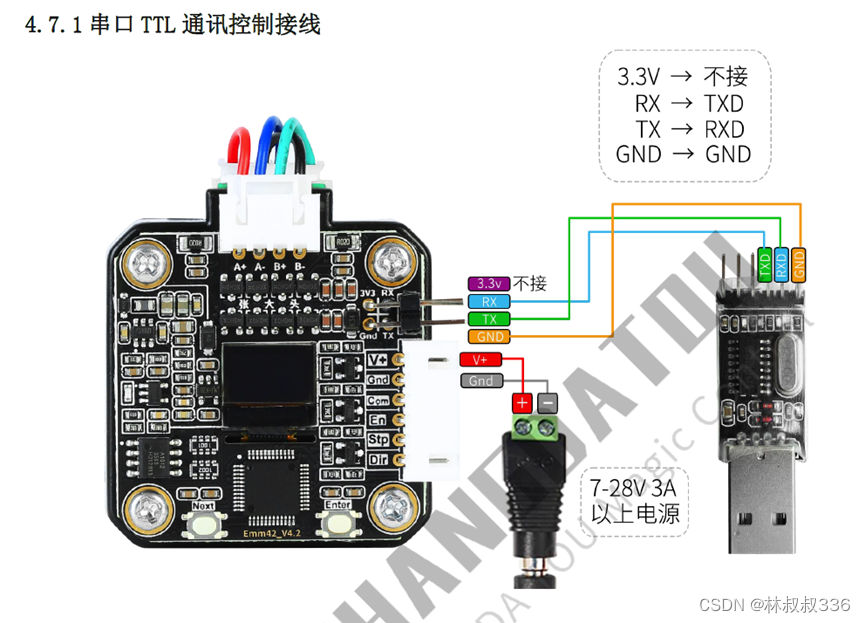
这个支撑多个电机挂在一个usart上面,只需要手动设置电机的地址就可以了,十分的方便
二、代码
这里直接给出了代码,代码也先当简单,不会看对象的话直接调用下面void loop中的那些函数就行。
因为其中有几处讲解的地方就是lastControlBytes,为了防止arduino一直在循环里给步进电机控制器一直发送消息,就做了数据更新的判断,所以大家大胆的在循环中调用set_speed()。
这里只做了速度的控制,还可以进行位置的控制,因为这次没用到,下次用到的时候再写给大家。
#include <Arduino.h>class StepperMotorControl {private:byte controlBytes[6] = {0x00, 0xF6, 0x14, 0xFF, 0x00, 0x6B};byte lastControlBytes[6] = {0x00, 0xF6, 0x14, 0xFF, 0x00, 0x6B};Stream *serialPort;bool hasChanged() {for (byte i = 0; i < 6; i++) {if (controlBytes[i] != lastControlBytes[i]) {return true;}}return false;}void updateLastControlBytes() {for (byte i = 0; i < 6; i++) {lastControlBytes[i] = controlBytes[i];}} void sendCommand() {if (hasChanged()) {serialPort->write(controlBytes, 6);updateLastControlBytes();}}public:StepperMotorControl(byte address, Stream *_serialPort) {controlBytes[0] = address; // 在构造函数中设置电机地址serialPort = _serialPort;} void set_speed(bool direction, uint16_t speed) {if (direction) {controlBytes[2] = (0x10) | ((speed >> 8) & 0x0F); // 逆时针方向} else {controlBytes[2] = (0x00) | ((speed >> 8) & 0x0F); // 顺时针方向}controlBytes[3] = speed & 0xFF;sendCommand();}void set_acceleration(uint16_t acceleration){controlBytes[4] = acceleration;sendCommand();}
};// 设置步进电机使用的串口
StepperMotorControl stepper(0x01,&Serial);void setup() {// 初始化串口Serial.begin(115200);
}void loop() {// 设置电机为逆时针方向,速度为0x4FFstepper.set_speed(1, 0x4FF);delay(5000); // 等待5秒// 设置电机为顺时针方向,速度为0x4FFstepper.set_speed(0, 0x4FF);delay(5000); // 等待5秒
}这篇关于步进闭环控制、速度控制(张大头Emm_V4.2驱动器)速度控制——Arduino的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






