emm专题
emm, ComfyUI的作者从Stability.AI离职了
🍖背景 今天在更新ComfyUI的过程中,看到Manager中有这样一段描述: 嗯?做了新的官方网站?然后开始新篇章? 难道说ComfyUI的作者从Stability.AI离职了? 赶紧点开链接看了下,emm,还真的是这样的,那ComfyUI后续的维护和更新会是如何呢?新篇章又会如何发展呢?我们可以一起看看作者写的更新日志。 👑ComfyUI的下一站 (以下内容直接翻译原作者
Emm_V5.0步进闭环驱动说明书Rev1.3
Emm42_V5.0步进闭环驱动说明书Rev1.3 一、产品介绍 1.1 产品简介 Emm42_V5.0是张大头闭环伺服全新推出的基于Emm42_V4.2的升级版本,它对闭环算法进行了升级改造,并融合了ZDT_X42_V1.2的软硬件框架,使它具有更高的转速和更快的打印速度,并拥有更多强大的功能,此外它还支持内置串口/RS232/RS485/CAN总线模块、

OAI openair3-NAS-UE-EMM代码解读(续)
文件路径openair3/NAS/UE/EMM/emm_main.c 714行之后 1.名称:emm_min_get_registered_plmn() 获取当前注册PLMN的标识; 输入:format:PLMN标识符的字符串表示的请求格式; 输出:plmn:编码在中的注册plmn标识符; 这段代码是在一个更大的上下文中,用于处理与PLMN(公共陆地移动网络)相关的操作。P
9-EMM Scenario and Eleven EMM Cases
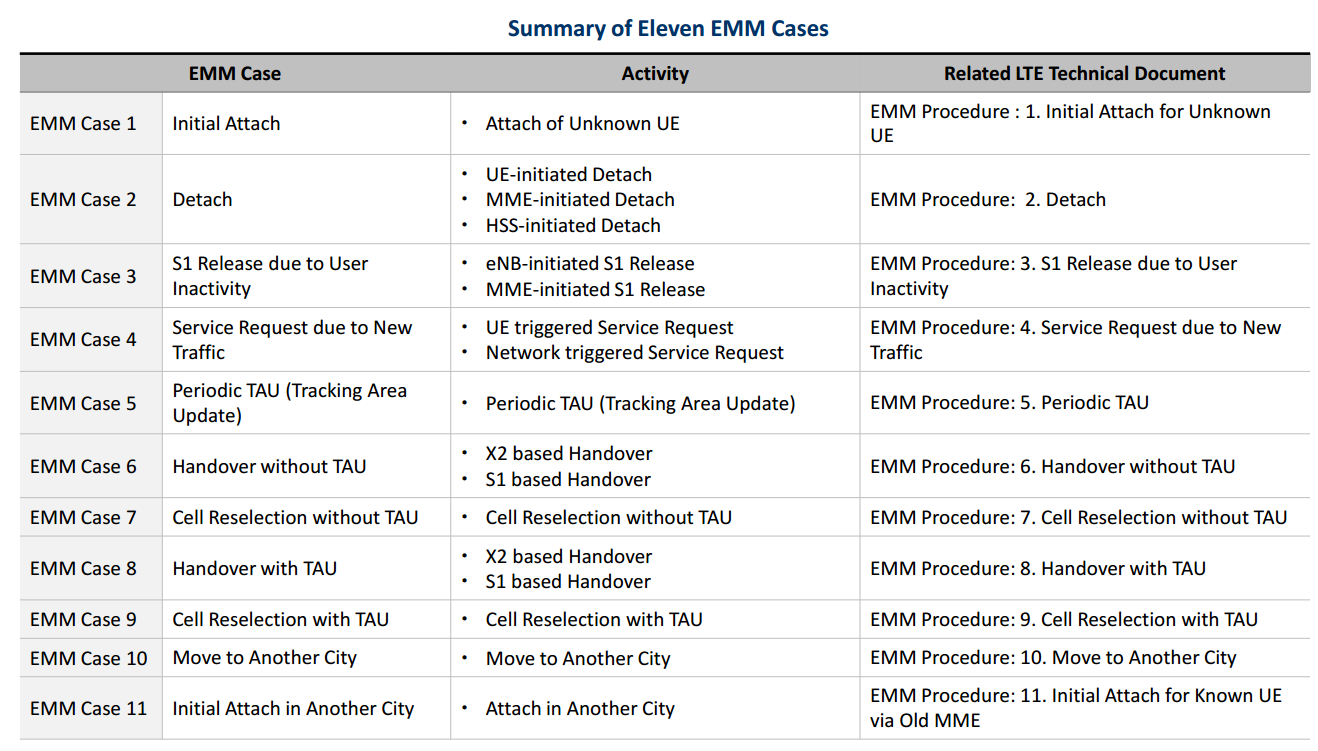
原文地址:http://www.netmanias.com/en/?m=view&id=techdocs&no=6002 NOTE:初始状态,UE A是关机的,并且在网络中没有UE A的UE上下文存在。 EMM case 1,Initial Attach(初始附着) UE状态:“EMM-Deregistered,ECM/RRC-Idle”–>“EMM-Registered

CAT表中EMM PID 和 PMT表中ECM 的解析
转载自:https://blog.csdn.net/kehyuanyu/article/details/22402497 直播中播放加扰节目时,常常启动播放流程(申请设备链,tuner,demux,audio decoder ,video decoder)之后,通常画面还是不能出来的。此时需要我设置当前节目的EMM PID,ECM PID到CA里面。解扰的大致流程是,第三方CA收到EMM PID
14-EMM Procedure 4. Service Requet
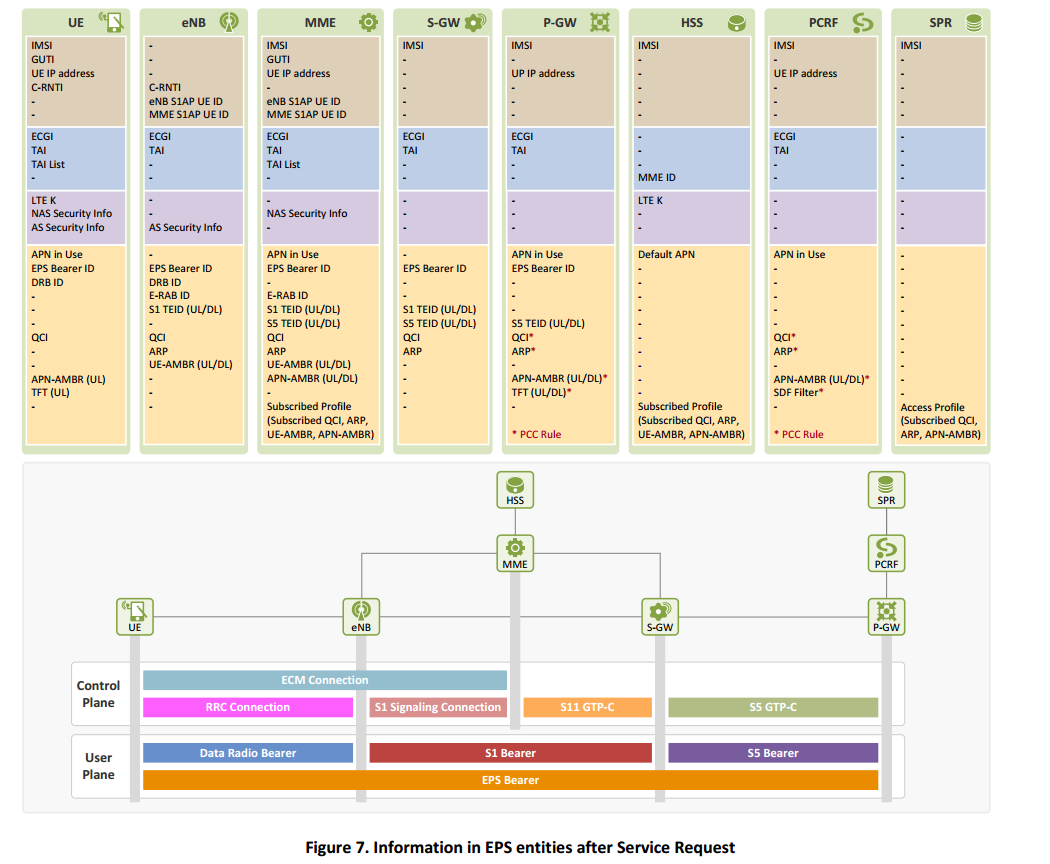
原文链接:http://www.netmanias.com/en/?m=view&id=techdocs&no=6134 I. Introduction 这篇文档描述EMM case-4:service request过程。这个过程是当有新流量时,在idle状态不活动的UE想激活来处理流量时执行的。新用户流量可以是从UE开始的上行流量,也可以是从网络到UE的下行流量。UE的E-UTRA
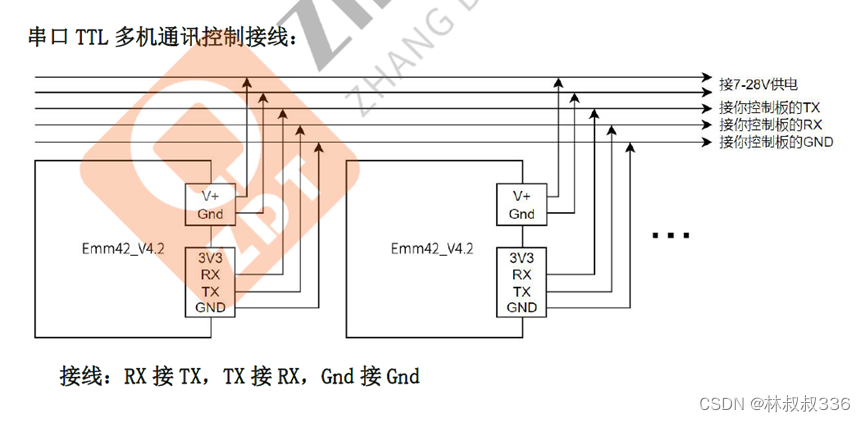
步进闭环控制、速度控制(张大头Emm_V4.2驱动器)速度控制——Arduino
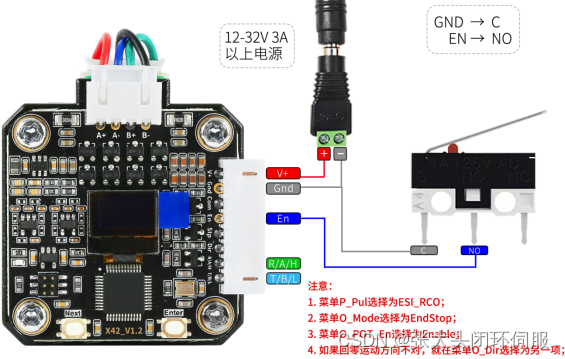
目录 前言 一、接线 二、代码 前言 步进电机的精准控制是一个比较麻烦的事,要是不想深入学习电机控制而且又有精准控制的需求的话,可以在某宝搜买闭环驱动器,这里我使用的是张大头42步进电机闭环控制器,“可恶”的是up主没有在他的例程中提供函数,然后自己写了一个,供大家参考,也望大家批评指正。 一、接线 这个支撑多个电机挂在一个usa

什么是企业移动化管理 (EMM)
什么是EMM或企业移动化管理 企业移动化管理 (EMM) 是组织用来保护公司拥有和员工拥有的移动设备上的敏感公司数据的一组策略和做法。Mobile Device Manager Plus 是一个全面的 EMM 解决方案,允许 IT 团队和管理员跨多个平台管理设备,实施所需的安全措施来保护这些设备上的业务关键型数据,并通过远程分发应用程序并安全地授予对员工所需数据的访问权限来提高员工的工作效率,所
Emm_V5.0步进闭环驱动说明书Rev1.2
Emm42_V5.0步进闭环驱动说明书Rev1.2 一、产品介绍 1.1 产品简介 Emm42_V5.0是张大头闭环伺服全新推出的基于Emm42_V4.2的升级版本,它对闭环算法进行了升级改造,并融合了ZDT_X42_V1.2的软硬件框架,使它具有更高的转速和更快的打印速度,并拥有诸如单圈/多圈回零、多机通讯同步控制、实时转速、到位输出/到位返回命令