本文主要是介绍有向图的负权值边与建模,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
参见 dijkstra 算法为什么高效
昨天的文字最后提到 “经理办公桌上有一堆报表,让工人拟合一份最佳收支方案,工人用图论建模,就要使用 floyd,bellman-ford 算法。”,为什么工人的建模的熵减过程会出现负权重边,而自然的熵增过程不会出现负权重边,本文解释一二。
自然的过程如爆炸,河水泛滥,昆虫无意识漫游等,这些都遵循第一性原理,而人为的过程比如金融投资,成本估算,道路交通网络行为分析等,都需要注入能量,它们不是自然的过程,背后的原理不再是最小作用量,分析求解的方式自然不同。
以跑步为例来建模。
跑步需要付出成本,但它也能获得收益,将收益看作负成本,最终我们追求目标的就是 “一段周期内的跑步总成本最小”,以此来安排跑步计划,跑 x 休 y:

设跑步一天的成本为 a,收益是 b,而收益每天衰减系数为 c,跑 x 休 y 的总成本就是:
A = a ∗ x − b ∗ x − b ∗ c ( 1 − c y ) 1 − c A=a*x-b*x-\dfrac{b*c(1-c^y)}{1-c} A=a∗x−b∗x−1−cb∗c(1−cy)
基于此,我们可以规划一个比较久的跑步时间,比如一年,然后在这一年中按固定跑 1 休 0,或跑 1 休 1,或跑 3 休 1,或跑 5 休 2,或在一长段时间随机 x,y,调节参数 a,b,c。
将每个计划的每一个跑休周期看做一条边,该周期的总成本 A 视为该边权重(它可能为负数),每个计划的起点视作顶点,跑步开始时间视作源顶点 S,结束时间视作目标顶点 D,事情就变成了求 S 到 D 的最短路径问题:
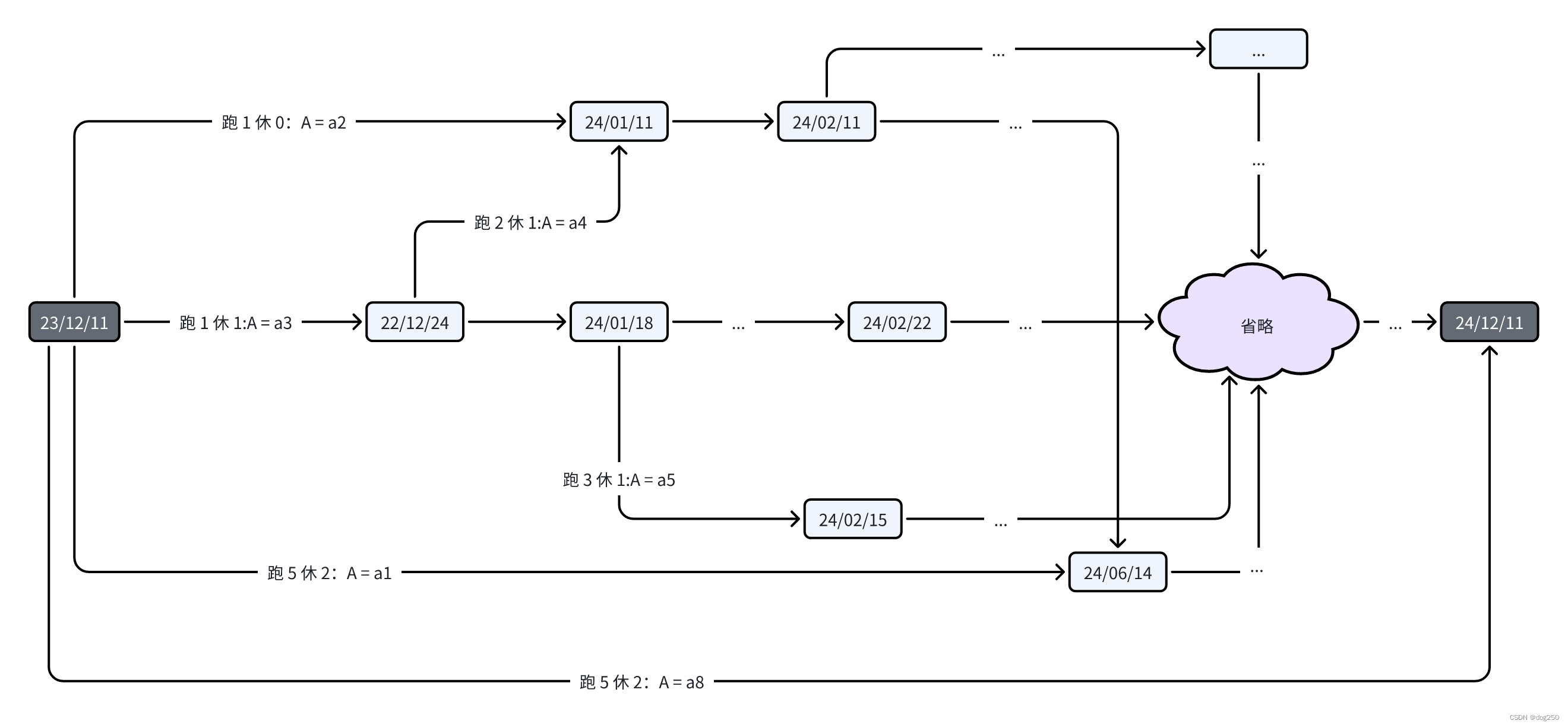
找到的最短路径就是最佳的跑步计划。类似的还可以用这个模型规划读书计划,生意买卖等和收支有关的计划,其中的关键在于边权重可以是负数。
负数权重显然是一种附着 “人为解释” 的权重,而不是 “自然的距离”,比如路由器之间链路的长度,传输 delay 都是自然距离,但如果规定何时走某条路有收取拥塞税进而增加 cost 度量,或奖励突发令牌,则属于人为附加权重了。
图论算法中,自然的最短距离,比如求物理最短距离或可划归为物理最短距离,那非 dijkstra 算法莫属,但人为建模的应用题,则要考虑边的负数权重,这种情况下必须通过遍历松弛来求解,而不能使用 “利用自然熵增” 的算法,因为假设不再成立了。至于单源还是多源最短路径,属于问题空间之外的话题,与本文讨论关系不大。
经常见到负权值边的讨论,无非就是说了一下为什么 dijkstra 不能处理这种情况,然后必须使用 floyd,bellman-ford 算法,而几乎没有说清本质的。
浙江温州皮鞋湿,下雨进水不会胖。
这篇关于有向图的负权值边与建模的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






