本文主要是介绍ROS 模拟激光仿真数据 使用stage进行仿真 在stage中控制两个机器人,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先启动测试 是否有stage的安装包
roslaunch turtlebot_stage turtlebot_in_stage.launch
若没有该包则进行安装
若有错误 则把立马的某些位置更改一下即可
 先把turtlebot_stage 中的maps文件夹复制到自己的工作空间中
maps中有这些文件
maze.png maze.yaml robopark2.bmp robopark_plan.yaml stage,其中stage 是一个文件夹 里面有maze.world robopark_plan.world turtlebot.inc
然后自己写一个启动satge的launch文件 名字为stage_test.launch
先把turtlebot_stage 中的maps文件夹复制到自己的工作空间中
maps中有这些文件
maze.png maze.yaml robopark2.bmp robopark_plan.yaml stage,其中stage 是一个文件夹 里面有maze.world robopark_plan.world turtlebot.inc
然后自己写一个启动satge的launch文件 名字为stage_test.launch
<launch><arg name="world_file" default=" $(find agv)/maps/maps/stage/maze.world"/><node pkg="stage_ros" type="stageros" name="stageros" args="$(arg world_file)"><param name="base_watchdog_timeout" value="0.5"/><remap from="odom" to="odom"/><remap from="base_pose_ground_truth" to="base_pose_ground_truth"/><remap from="cmd_vel" to="mobile_base/commands/velocity"/><remap from="base_scan" to="scan"/></node>
</launch>
测试启动launch文件
成功出现和上图一样的画面
改变代码 添加两个机器人
打开maze.world 在最下面添加一段代码
turtlebot
(
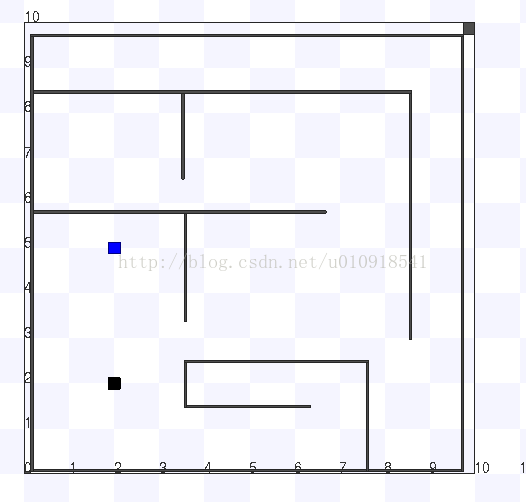
pose [ 2.0 5.0 0.0 0.0 ]
name "turtlebot1"
color "blue"
)
将之重命名为maze_two.world
更改launch文件
<launch><arg name="world_file" default=" $(find agv)/maps/maps/stage/maze_two.world"/><node pkg="stage_ros" type="stageros" name="stageros" args="$(arg world_file)"><param name="base_watchdog_timeout" value="0.5"/><remap from="odom" to="odom"/><remap from="base_pose_ground_truth" to="base_pose_ground_truth"/><remap from="cmd_vel" to="mobile_base/commands/velocity"/><remap from="base_scan" to="scan"/></node>
</launch>
启动测试 出现了第二个蓝色的机器人
这篇关于ROS 模拟激光仿真数据 使用stage进行仿真 在stage中控制两个机器人的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



