通信接口专题

【启明智显产品介绍】Model3C工业级HMI芯片详解专题(三)通信接口
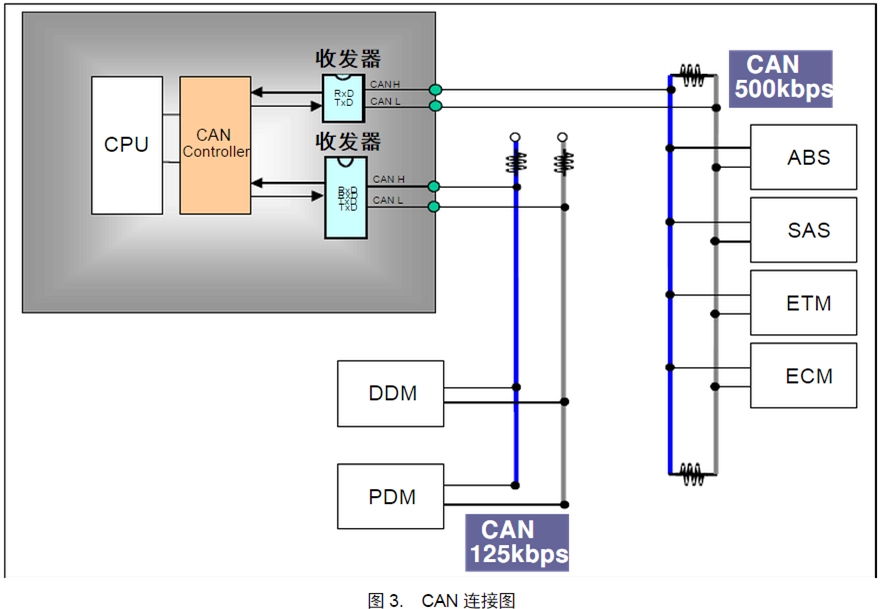
Model3C 是一款基于 RISC-V 的高性能、国产自主、工业级高清显示与智能控制 MCU, 集成了内置以太网控制器,配备2路CAN、4路UART、5组GPIO、2路SPI等多种通信接口,能够轻松与各种显示设备连接,实现快速数据传输和稳定通信,可以与各种工业设备和系统进行无缝对接,为用户提供了更加灵活的解决方案。 本文将从Model3C的互联接口出发,详细介绍Model3C的功能特性。 双

『FPGA通信接口』LVDS接口(4)LVDS接收端设计
文章目录 1.LVDS接收端概述2逻辑框图3.xapp855训练代码解读4.接收端发送端联调5.传送门 1.LVDS接收端概述 接收端的传输模型各个属性应该与LVDS发送端各属性一致,例如,如果用于接收CMOS图像传感器的图像数据,则接收端程序的串化因子、通道个数等将要与设备一致。在硬件设计上,LVDS时钟线和LVDS数据线应该等长设计,但由于布线制板工艺的影响,难免数据线和

『FPGA通信接口』LVDS接口(2)硬件设计
文章目录 1.LVDS原理2.xilinx器件对于LVDS的支持3.LVDS信号PCB布线要求4.传送门 1.LVDS原理 如上图所LVDS的工作原理示意图,其Driver驱动器由一个恒流源是LVDS发送端(通常为 3.5mA)驱动一对差分信号线组成。驱动状态会翻转就产生正负电压的变化,在接收端表现为01状态切换。在接收端有一个高的直流输入阻抗(几乎不会消耗电流),所以几

BMS使用qt实现一个上位机,通信接口使用can
实现一个使用Qt作为上位机界面,通过CAN总线采集电压、电流、温度等信息的BMS(Battery Management System)监控系统,大致可以分为以下几个步骤: 1. 环境准备 安装Qt开发环境:确保你已经安装了Qt Creator及相应的Qt库。推荐使用Qt 5.x版本。安装CAN驱动和开发库:根据你的操作系统,可能需要安装如SocketCAN(Linux)、CANfestival

『FPGA通信接口』DDR(4)DDR3内存条SODIMMs读写测试
文章目录 前言1.MIG IP核配置2.测试程序3.DDR应用4.传送门 前言 不论是DDR3颗粒还是DDR3内存条,xilinx都是通过MIG IP核实现FPGA与DDR的读写。本文区别于DDR颗粒,记录几个与颗粒配置不同的地方。关于DDR的原理与MIG IP的简介,请查看前面文章,链接在文末。本文提供了配套的工程源码,链接在文末,本文用的内存条为MT16KTF1G64HZ

『FPGA通信接口』DDR(3)DDR3颗粒读写测试
文章目录 前言1.配套工程简介2.测试内容与策略3. 测试程序分析4.程序结果分析5.一个IP控制两颗DDR36.传送门 前言 以四颗MT41K512M16HA-125AIT颗粒为例,介绍如何在一块新制板卡上做关于DDR3的器件测试。前面两篇介绍了什么是DDR,并介绍了xilinx给出的FPGA与DDR完美结合的方案MIG IP核,请按照顺序阅读DDR相关文章,链接在文末。D

『FPGA通信接口』汇总目录
Welcome 大家好,欢迎来到瑾芳玉洁的博客! 😑励志开源分享诗和代码,三餐却无汤,顿顿都被噎。 😭有幸结识那个值得被认真、被珍惜、被捧在手掌心的女孩,不出意外被敷衍、被唾弃、被埋在了垃圾堆。 🙂喜欢舞文弄墨咬文嚼字的混沌世界,懵懂无知走上了工科直男01的不归路。 😎八十公斤的体重勉强与大鹏一日同风起的浮力动态平衡,做不到宠辱不惊无欲无求的匀速直线运动,就按部就班的小波浪式前进,螺旋

『FPGA通信接口』串行通信接口-IIC(2)EEPROM读写控制器
文章目录 1.EEPROM简介2.AT24C04简介3.逻辑框架设计4.随机读写时序5.仿真代码与仿真结果分析6.注意事项7.效果8.传送门 1.EEPROM简介 EEPROM (Electrically Erasable Programmable read only memory) 是指带电可擦可编程只读存储器。是一种掉电后数据不丢失的存储芯片。在嵌入式控制系统中常常用来保存
以太网PHY,MAC及其通信接口介绍
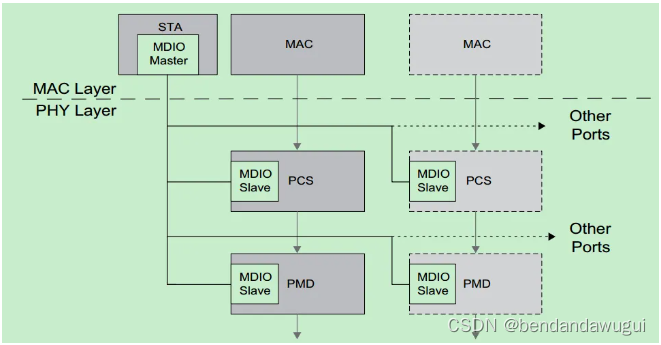
本文主要介绍以太网的 MAC 和 PHY,以及之间的 MII(Media Independent Interface ,媒体独立接口)和 MII 的各种衍生版本——GMII、SGMII、RMII、RGMII等。 一:简介 从硬件的角度看,以太网接口电路主要由MAC(Media Access Control)控制器和物理层接口PHY(Physical Layer,PHY)两大部分构成。如下图所
Python http通信接口开发示例
前言 需求背景来源于AI算法通信接口编写…采用python flask框架 解决flask不是生产环境问题 一、flask框架 1.1,简介 Flask是一个使用 Python 编写的轻量级 Web 应用框架。其 WSGI 工具箱采用 Werkzeug ,模板引擎则使用 Jinja2 。Flask使用 BSD 授权。Flask也被称为 “microframework” ,因

串行通信接口之RS232、RS485与RS422
前言 RS232,RS485,RS422都是串口通信协议家族的一员,那么他们有什么区别呢?首先让我们来了解俩个简单的知识点,TTL电平以及CMOS电平,单端传输以及差分传输。 TTL电平 TTL电平接口电路由晶体管构成,5V表示1,0V表示0。 CMOS电平 CMOS电平接口电路由场效应管构成,3-15V表示1,0V表示0。 单端传输 单端传输由参考地和信号线,单端传输是在一根导线上
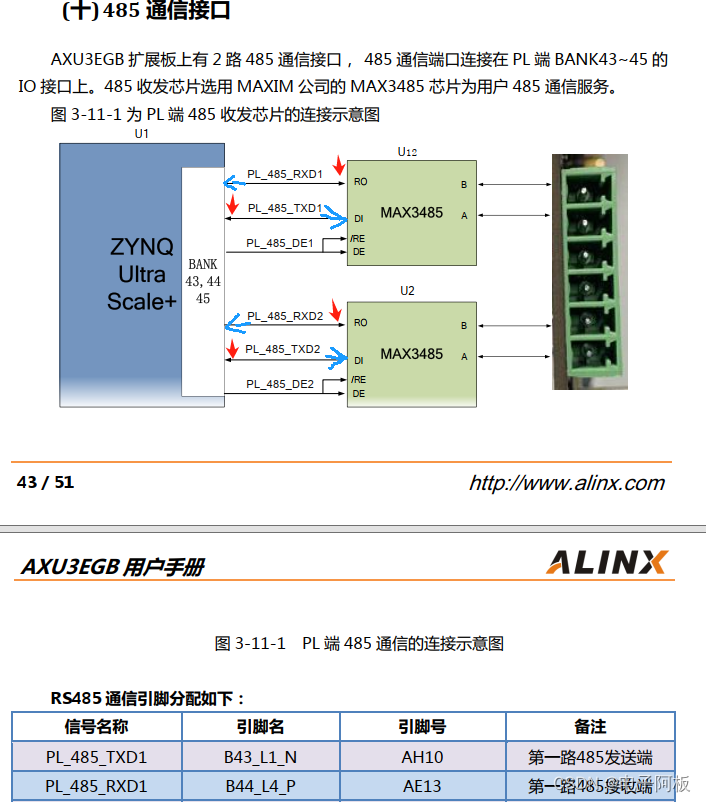
ALINX黑金AXU3EGB 开发板用户手册RS485通信接口图示DI RO信号方向标识错误说明
MAX3485这类RS485芯片,DI是TTL信号输入,RO是TTL信号输出 如下图是MAX3485手册规格书。 因此 ALINX黑金AXU3EGB 用户手册 Page 43页 图 3-11-1 PL 端 485 通信的连接示意图,MAX3485芯片的DI RO信号输入输出标识方向是错误的,应为蓝色箭头方向。 (备注里面是对的) 下图为AXU3EGB 开发板用户手册相关内容 至于为什么要提
驱动开发:内核封装TDI网络通信接口
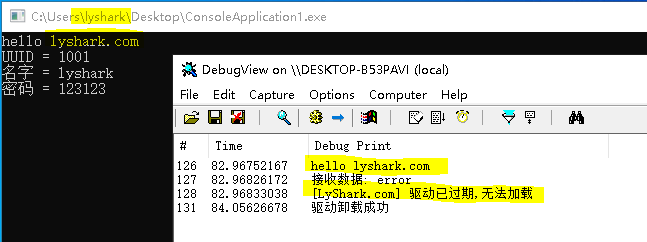
在上一篇文章《驱动开发:内核封装WSK网络通信接口》中,LyShark已经带大家看过了如何通过WSK接口实现套接字通信,但WSK实现的通信是内核与内核模块之间的,而如果需要内核与应用层之间通信则使用TDK会更好一些因为它更接近应用层,本章将使用TDK实现,TDI全称传输驱动接口,其主要负责连接Socket和协议驱动,用于实现访问传输层的功能,该接口比NDIS更接近于应用层,在早期Win系统中常用于

【java】调用阿里云通信接口发短信
【前言】 调用短信发送验证码的方法阿里云都写好了,而且会自动限制单日发送量,每分钟一条,同一手机号单日10条等等。安全性很好。而且国际国内都能发。 【接口代码】 package com.candyshop.utils.util;import com.aliyuncs.DefaultAcsClient;import com.aliyuncs.IAcsClient;impo

15.2 单片机SPI通信接口
UART、I 2 C和 SPI 是单片机系统中最常用的三种通信协议。前边我们已经学了 UART 和I 2 C通信协议,这节课我们来学习剩下的 SPI 通信协议。 SPI 是英语 Serial Peripheral Interface 的缩写,顾名思义就是串行外围设备接口。SPI 是一种高速的、全双工、同步通信总线,标准的 SPI 也仅仅使用 4 个引脚,常用于单片机和 EEPRO

【接口技术】串行通信接口习题
1:串行通信有()种通信方式。 A:2 B:3 C:4 D:1 解答:B PPT第9页: 按照数据流的方向可将串行通信分为3种传送模式:全双工、半双工、单工 2:在数据传送过程中,数据由串行变为并行,或由并行变为串行,这种转换是通过接口电路的()实现的。 A:数据寄存器 B:控制寄存器 C:锁存器 D:移位寄存器 解答:D PPT第20页: 发送时钟:并行的数据序列被送入
![[ROS2] --- 通信接口](https://img-blog.csdnimg.cn/direct/78d6260117384619a54a1c86ffd546f0.png)
[ROS2] --- 通信接口
1 通信接口的定义 通信并不是一个人自言自语,而是两个甚至更多个人,你来我往的交流,交流的内容是什么呢?为了让大家都好理解,我们可以给传递的数据定义一个标准的结构,这就是通信接口。 ROS的通信系统,它的主要目的就是传输数据,那就得让大家高效的建立连接,并且准确包装和解析传输的数据内容,话题、服务等机制也就诞生了,他们传输的数据,都要符合通信接口的标准定义。 2 ROS通信接口 接口可以让

常用通信接口、协议:SCCB
一、概述 SCCB(串行摄像头控制总线)是由欧姆尼图像技术公司(OmniVision)开发的一种类IIC的总线,主要用于其OV系列的图像传感器上(但目前有很多家的图像传感器都有采用该控制总线)。相对于IIC总线来说SCCB与之最主要的差异在于连续读写模式;SCCB不支持该模式,即每次读写完一个字节,主机必须发送一个NA信号。 采用了SCCB总线的图像传感器都
ut5311通信接口单元_总线接口与计算机通信(五)CAN总线
CAN网络图示 CAN的特点 CAN协议具有以下特点。 (1) 多主控制 在总线空闲时,所有的单元都可开始发送消息(多主控制)。 最先访问总线的单元可获得发送权(CSMA/CA方式*1)。 多个单元同时开始发送时,发送高优先级ID消息的单元可获得发送权。 (2) 消息的发送 在CAN协议中,所有的消息都以固定的格式发送。总线空闲时,所有与总线相连的单元都可以开始发送新消息。两个以上的单元同时开
第6章_瑞萨MCU零基础入门系列教程之串行通信接口(SCI)
本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949 配套资料获取:https://renesas-docs.100ask.net 瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article
常用的嵌入式硬件通信接口协议(UART、IIC、SPI、RS-232、RS-485、RS-422、CAN、USB、IRDA)(三)
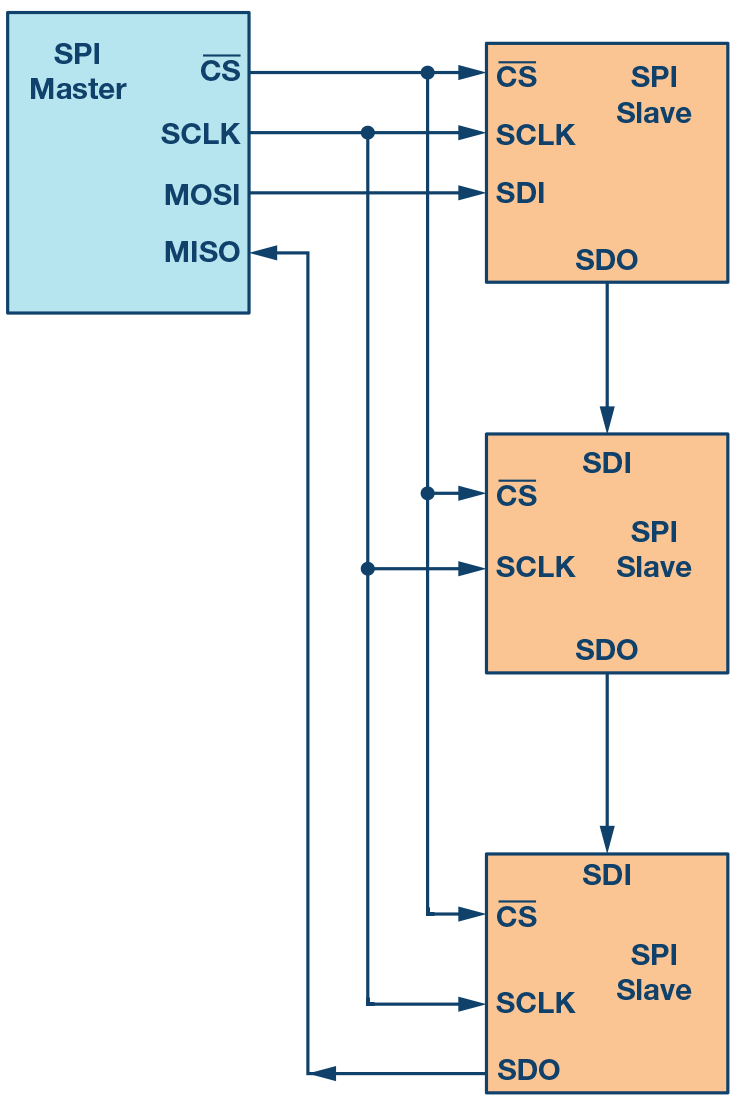
3、SPI (1)基本概念 SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线。它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。 SPI是一个环形总线结构,由MOSI、MISO、SCLK、CS构成,其时序其实很简单,主要是在SCLK的控制下,两个双向移位寄存器
嵌入式硬件通信接口协议-SPI(一)协议基础
文章首发于同名微信公众号:DigCore 欢迎关注同名微信公众号:DigCore,及时获取最新技术博文。 原文链接:https://mp.weixin.qq.com/s/hDUK43s8naybJLvoE2UsoA 本节继续讲嵌入式硬件通信接口协议中的另外一个串行通信接口-SPI。相比于UART串口协议,SPI又有着其独特之处。 简介 SPI(全称SerialPerip