本文主要是介绍[ROS2] --- 通信接口,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 通信接口的定义
通信并不是一个人自言自语,而是两个甚至更多个人,你来我往的交流,交流的内容是什么呢?为了让大家都好理解,我们可以给传递的数据定义一个标准的结构,这就是通信接口。
ROS的通信系统,它的主要目的就是传输数据,那就得让大家高效的建立连接,并且准确包装和解析传输的数据内容,话题、服务等机制也就诞生了,他们传输的数据,都要符合通信接口的标准定义。
2 ROS通信接口
接口可以让程序之间的依赖降低,便于我们使用别人的代码,也方便别人使用我们的代码,这就是ROS的核心目标,减少重复造轮子。
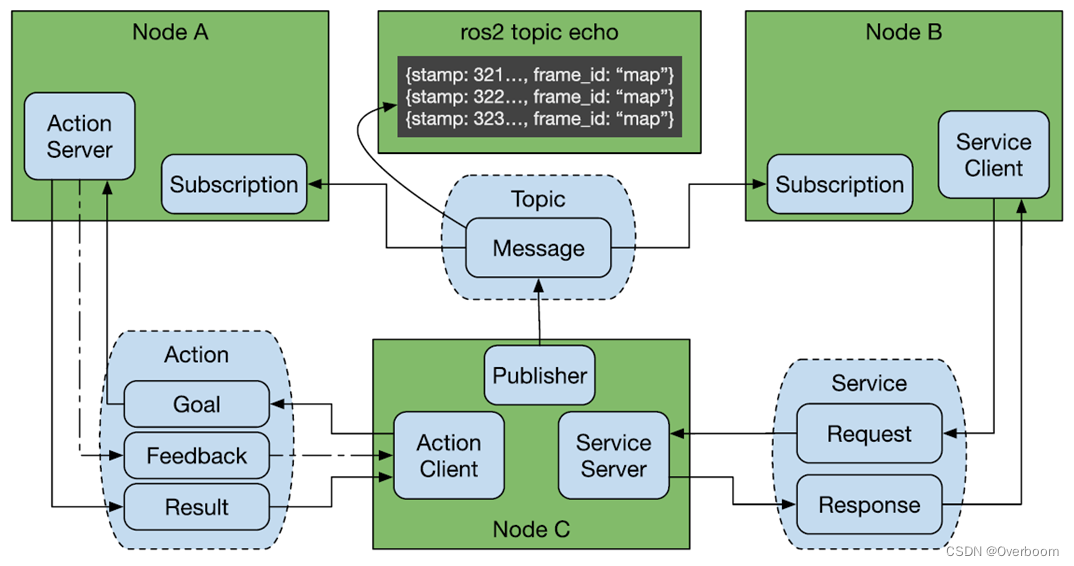
ROS有三种常用的通信机制,分别是话题、服务、动作,通过每一种通信种定义的接口,各种节点才能有机的联系到一起。
2.1 ROS通信接口的三种形式
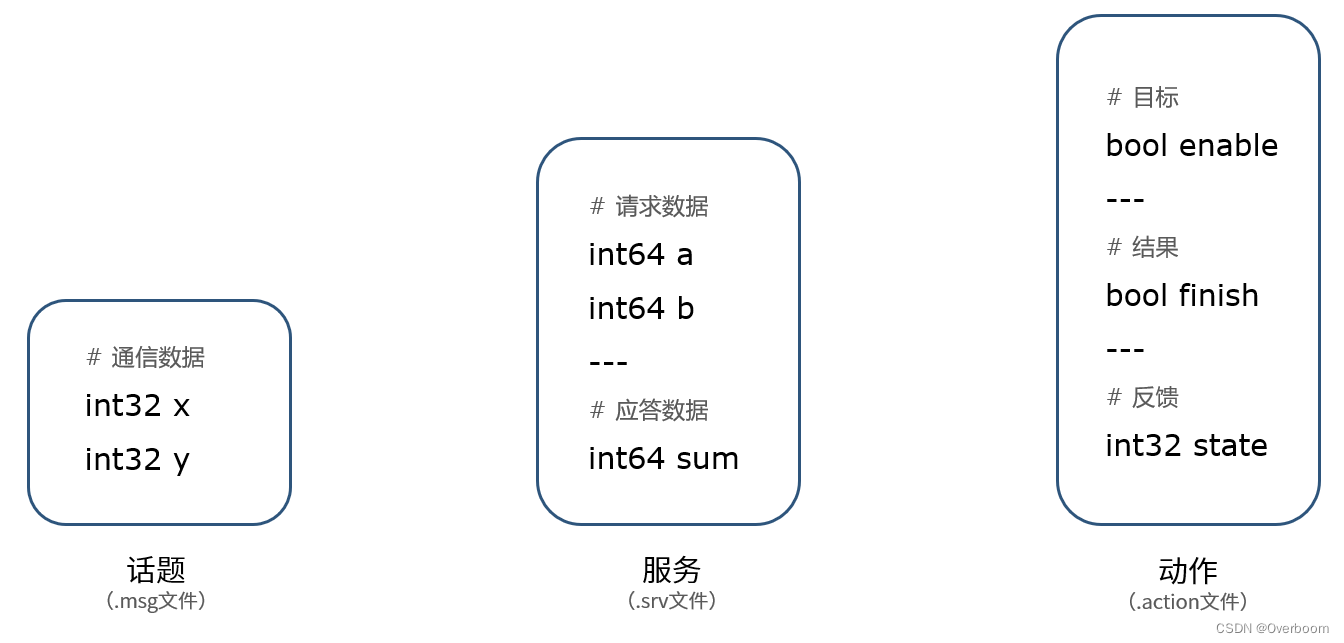
为了保证每一个节点可以使用不同语言编程,ROS将这些接口的设计做成了和语言无关的,比如这里看到的int32表示32位的整型数,int64表示64位的整型数,bool表示布尔值,还可以定义数组、结构体,这些定义在编译过程中,会自动生成对应到C++、Python等语言里的数据结构。
-
话题通信接口的定义使用的是.msg文件,由于是单向传输,只需要描述传输的每一帧数据是什么就行,比如在这个定义里,会传输两个32位的整型数,x、y,我们可以用来传输二维坐标的数值。
-
服务通信接口的定义使用的是.srv文件,包含请求和应答两部分定义,通过中间的“—”区分,比如之前我们学习的加法求和功能,请求数据是两个64位整型数a和b,应答是求和的结果sum。
-
动作是另外一种通信机制,用来描述机器人的一个运动过程,使用.action文件定义,比如我们让小海龟转90度,一边转一边周期反馈当前的状态,此时接口的定义分成了三个部分,分别是动作的目标,比如是开始运动,运动的结果,最终旋转的90度是否完成,还有一个周期反馈,比如每隔1s反馈一下当前转到第10度、20度还是30度了,让我们知道运动的进度。
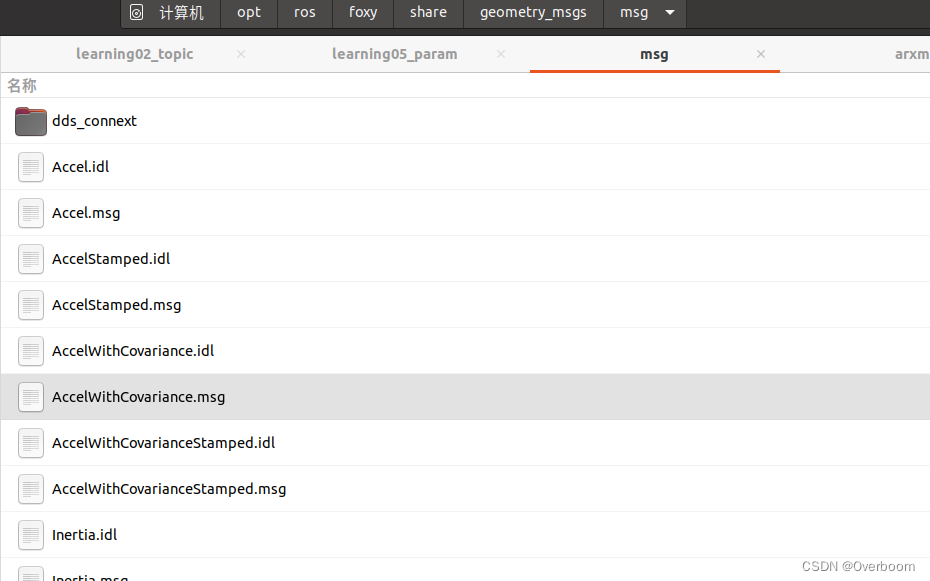
2.2 ROS提供的标准接口
在ROS安装路径中的share文件夹中找到,涵盖众多标准定义,可以打开几个看看。
这篇关于[ROS2] --- 通信接口的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



![[Doc][px4][ros2][gazebo][yolov8]PX4-ROS2-Gazebo-YOLOv8](https://i-blog.csdnimg.cn/direct/ab1456b7c811433f9d7af9ea130641a1.png)
