航迹专题

dr 航迹推算 知识介绍
DR(Dead Reckoning)航迹推算是一种在航海、航空、车辆导航等领域中广泛使用的技术,用于估算物体的位置。DR航迹推算主要通过已知的初始位置和运动参数(如速度、方向)来预测物体的当前位置。以下是 DR 航迹推算的详细知识介绍: 1. 基本概念 Dead Reckoning(DR): 定义:通过利用已知的当前位置、速度、方向和时间间隔,计算物体在下一时刻的位置。应用:用于导航和定位,
鹅算法(GOOSE Algorithm,GOOSE)求解复杂城市地形下无人机避障三维航迹规划,可以修改障碍物及起始点(Matlab代码)
一、鹅算法 鹅优化算法(GOOSE Algorithm,GOOSE)从鹅的休息和觅食行为获得灵感,当鹅听到任何奇怪的声音或动作时,它们会发出响亮的声音来唤醒群中的个体,并保证它们的安全。 参考文献 [1]Hamad R K, Rashid T A. GOOSE algorithm: a powerful optimization tool for real-world engineering

【无人机三维路径规划】基于鱼鹰算法OOA实现复杂城市地形下无人机避障三维航迹规划附Matlab代码
% 初始化遗传算法参数 population_size = 50; % 种群大小 max_generations = 100; % 最大迭代次数 mutation_rate = 0.1; % 突变率 % 定义目标函数(适应度函数) fitness_function = @(x) calculate_fitness(x); % 定义路径规划问题的约束函数 constraint_function

路径优化算法 | 基于A_Star算法实现复杂地形下无人机威胁概率地图最短路径避障三维航迹规划
概述 A* (A-Star) 算法是一种广泛使用的路径搜索和图形遍历算法,用于在给定起点和终点的情况下找到最短路径。对于无人机在复杂地形下的三维航迹规划,A* 算法可以与其他技术结合,例如威胁概率地图(Threat Probability Map),以实现避障和最短路径规划。 以下是一个基于 A* 算法实现复杂地形下无人机威胁概率地图最短路径避障三维航迹规划的基本步骤: 构建威胁概率地图:
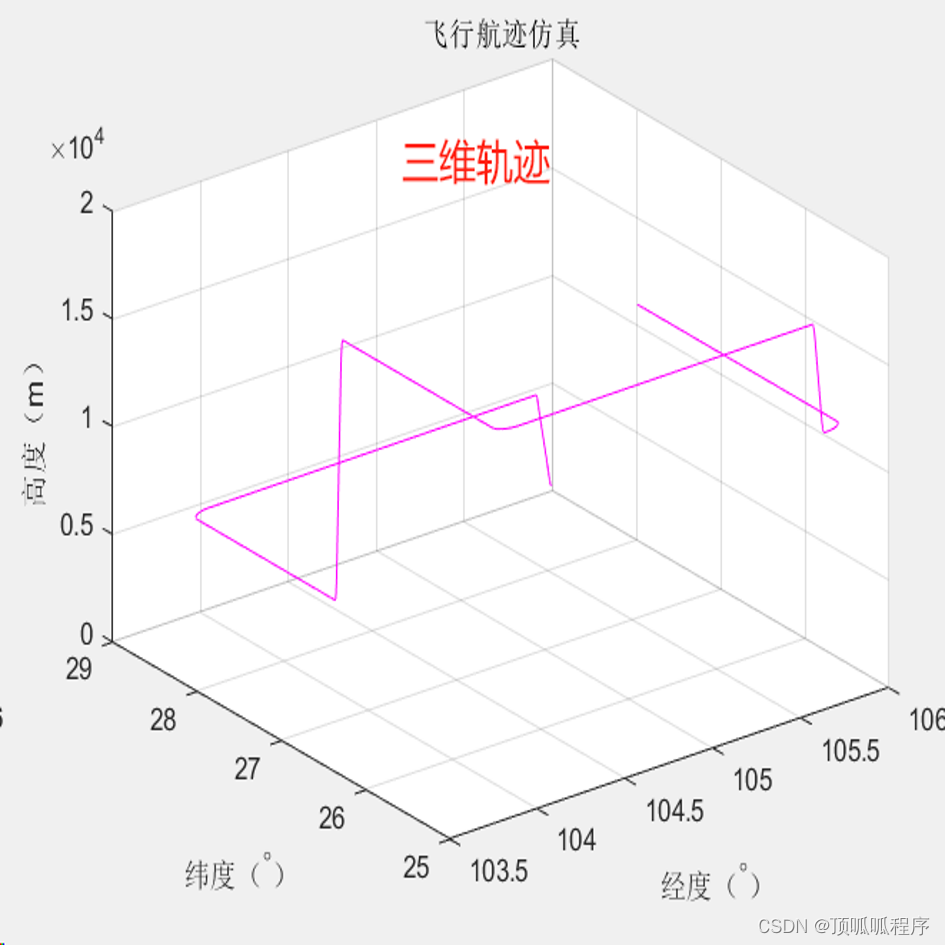
206基于matlab的无人机航迹规划(UAV track plannin)
基于matlab的无人机航迹规划(UAV track plannin)。输入输出参数包括 横滚、俯仰、航向角(单位:度);横滚速率、俯仰速率、航向角速率(单位:度/秒);飞机运动速度——X右翼、Y机头、Z天向(单位:米/秒);飞机运动加速度——X右翼、Y机头、Z天向(单位:米/秒/秒);航迹发生器初始位置经度、纬度、高度(单位:度、度、米);飞机运动速度——X东向、Y北向、Z天向(单位:米/秒);

【路径规划】快速行军树风场下无人机航迹规划【含Matlab源码 2619期】
⛄一、快速行军树风场下简介 本论文旨在解决无人机发动机熄火问题,在该问题中无人机沿每个点进行应急检查。每一次检查都会模拟一个发动机故障,之后无人机被迫进入稳定下滑,必须能够到达在分配的时间内预定义的安全区。固有的困难在于以计算有效的方式处理非线性时间检查。这是因为高精度要求精细的路径离散化,这导致正在执行大量检查。解决方案还必须包含非完整性动力学、风扰动和防撞。 这个问题的重要性不能低估,
部署Elasticsearch集群,实现海量航迹数据存储
文章目录 引言I 集群的部署方式1.1 单主节点1.2 多主节点1.3 节点的角色1.4 查询集群状态 II 单主节点2.1 安装Master Node2.2 安装Slave node III 主主模式3.1 node-13.2 node-23.3 参数含义 IV Logstash4.1 通过下载来安

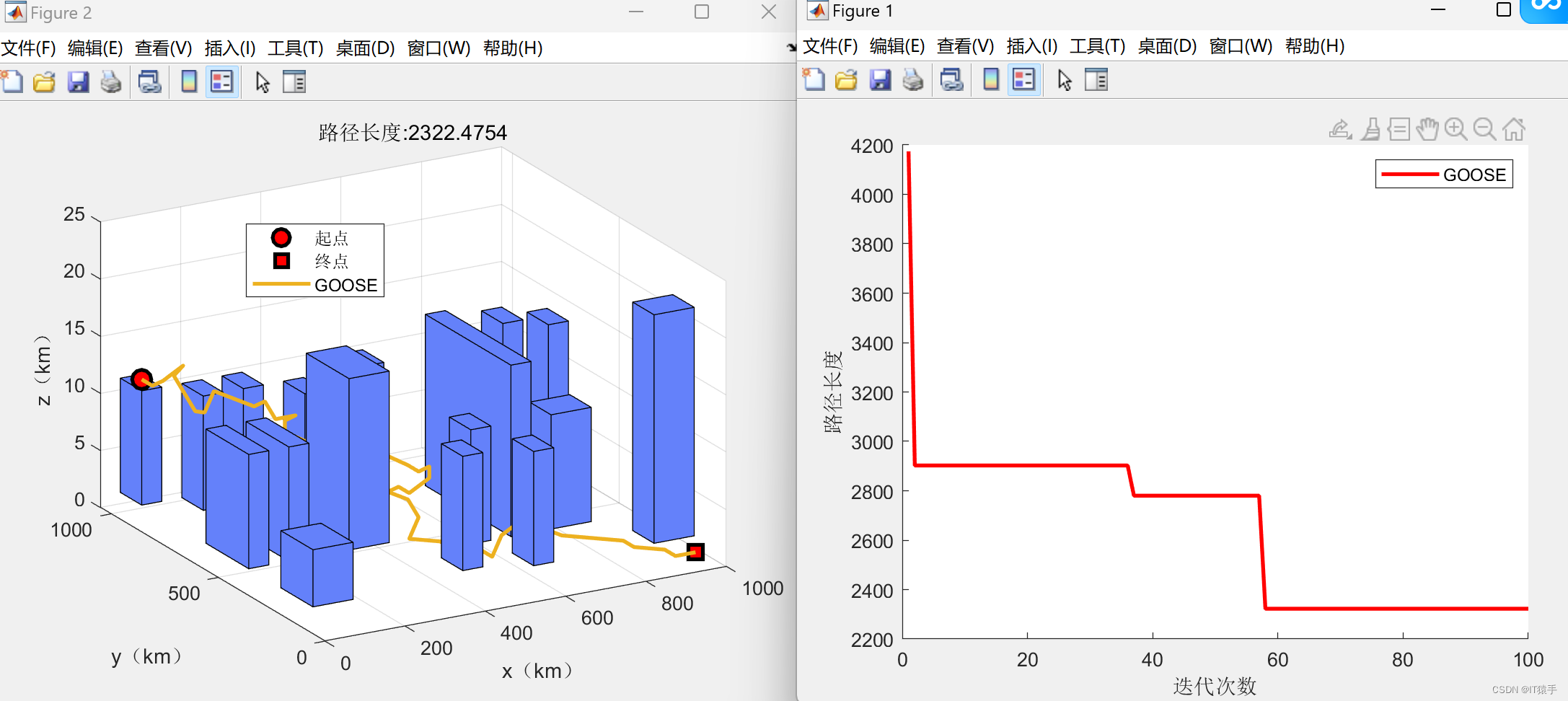
2024年新算法:基于鹅算法GOOSE的城市三维无人机路径规划(复杂地形三维航迹路径规划)
摘要 本文提出了一种利用鹅算法(GOOSE algorithm)GOOSE来解决城市环境下无人机三维路径规划问题的方法。这种方法将复杂的无人机航迹规划任务转化为一个优化问题,然后运用鹅算法GOOSE来解决这个优化问题。鹅算法(GOOSE)是一种受鹅在休息和觅食过程中的行为特征启发的算法,该算法具备强大的全局搜索和局部搜索能力,能够在复杂的搜索空间中找到最优解。我们将GOOSE算法应用于城市复杂地

渔业安全生产综合管理指挥系统-航迹数据优化方案
引言 背景: 目前系统查询轨迹数据比较慢的原因是没有进行读写分离,轨迹数据的查询和写入都是SQL Server服务器进行。轨迹数据是基于视图进行查询,视图是一个效率低下的关联查询,每次查询数据,数据库的压力比较大。 优化方案:基于ElasticSearch分布式集群存储海量航迹数据(北斗、短波、AIS),实现轨迹数据的读写分离。业务数据通过传统DB做持久化,Elastic Search做搜
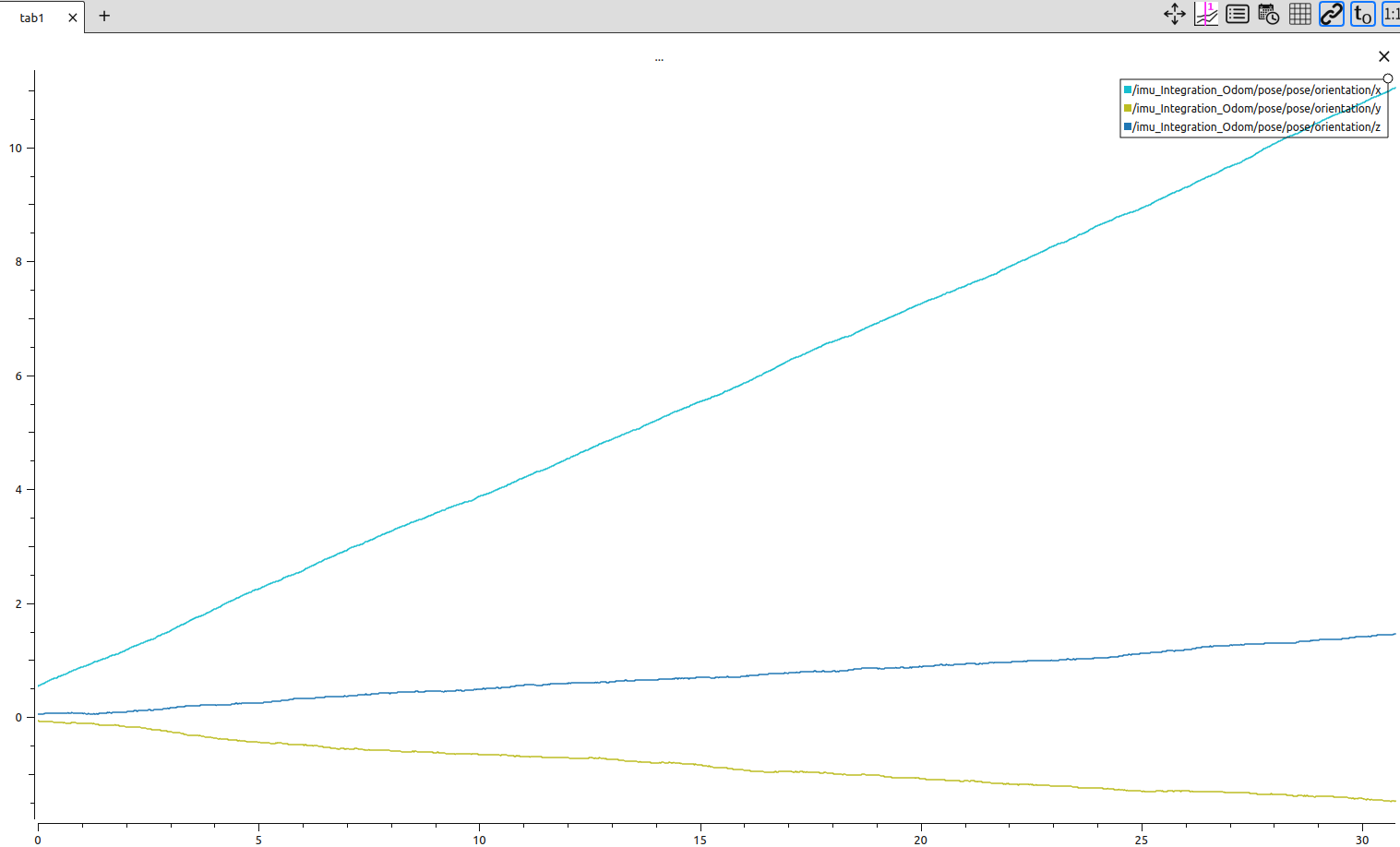
惯性导航 | 航迹推算与gazebo仿真
惯性导航 | 航迹推算与gazebo仿真 IMU数据进行短时间航迹推算代码gazebo中进行仿真测试 IMU数据进行短时间航迹推算 代码 声明一个用与 IMU积分的类 ,来实现 短时间内的航迹推算 类的名字叫 IMUIntegration 构造函数 有三个变量进行私有变量初始化 重力、初始陀螺仪零偏、初始加速度零偏。 class IMUIntegration {publi
无人机自主飞行航迹规划问题
摘要 本文分别研究了基于二维平面和三维空间的最优航迹规划问题。 对于第一问,我们在忽略地形和无人机操作性能等因素影响的基础上,将影响无人机飞行的“敌方雷达威胁”和“飞行燃油代价”两个因素进行了量化处理,建立了雷达威胁模型和燃油代价模型,并在这两个模型的基础上建立了基于二维平面的最优航迹规划模型。在求解该模型时,我们依据图论中的相关理论,将二维平面划分成了若干网格,然后使用Dijkstra算法来
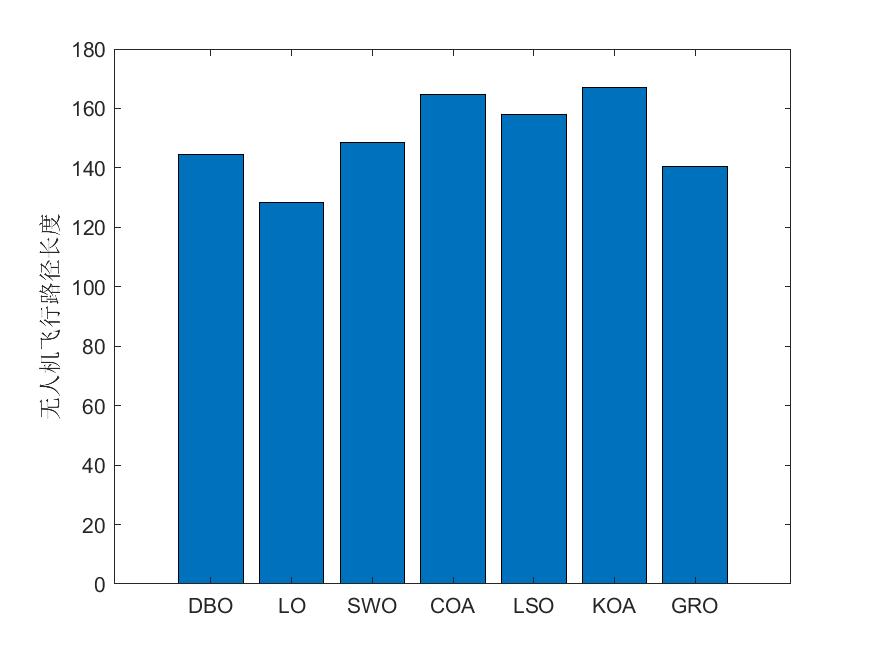
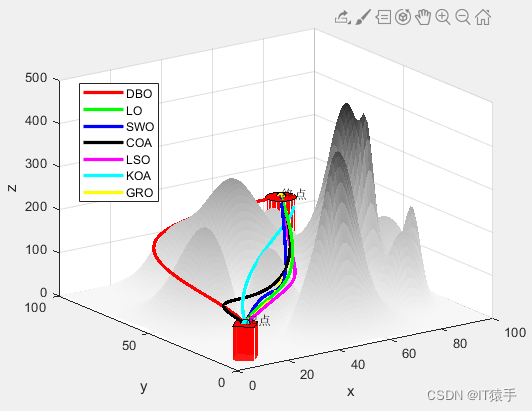
无人机航迹规划(五):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发所得。单目标优化:蜣螂优化算法(Dung beetle optimizer,DBO)_蜣螂算法-CSDN博客 参考文
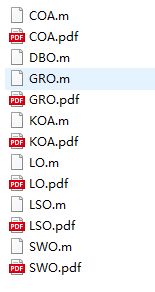
无人机航迹规划(六):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发所得。单目标优化:蜣螂优化算法(Dung beetle optimizer,DBO)_蜣螂算法-CSDN博客 参考文
无人机航迹规划(三):七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发所得。单目标优化:蜣螂优化算法(Dung beetle optimizer,DBO)_蜣螂算法-CSDN博客 参考文
无人机航迹规划(一)七种元启发算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划(提供MATLAB代码)
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发所得。单目标优化:蜣螂优化算法(Dung beetle optimizer,DBO)_蜣螂算法-CSDN博客 参考文

基于JAYA算法的无人机航迹规划-附代码
基于JAYA算法的无人机航迹规划 文章目录 基于JAYA算法的无人机航迹规划1.JAYA搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用JAYA算法来优化无人机航迹规划。 1.JAYA搜索算法 JAYA算法原理请参考:https://blog.csdn.net/u011

基于车轮安装MEMS IMU的航迹推算算法研究
本文由来:前一篇文章“零速更新(ZUPT)辅助INS定位”,并通过开源方案ZUPT-aided-INS进行了算法验证。在验证过程中,意识到在进行多源传感器融合算法中,利用载体自身运动信息进行约束修正非常重要,因为这不需要额外增加传感器在现有系统上进行ZUPT/ZIHR,可以提高系统精度和鲁棒性,特别是在部分场景中多源传感器中部分传感器退化的情况下,在日常工作中也常称为“engineer trick

基于精确罚函数的无人艇航迹规划和自动避障算法MATLAB算法实现
关键词: 无人艇;航迹规划;最优控制;精确罚函数;障碍规避 Key words: unmanned surface vehicles (USV);trajectory planning;optimal control;exact penalty function;obstacle avoidance 网络首发地址:https://kns.cnki.net/kcms/detail/42.1755.

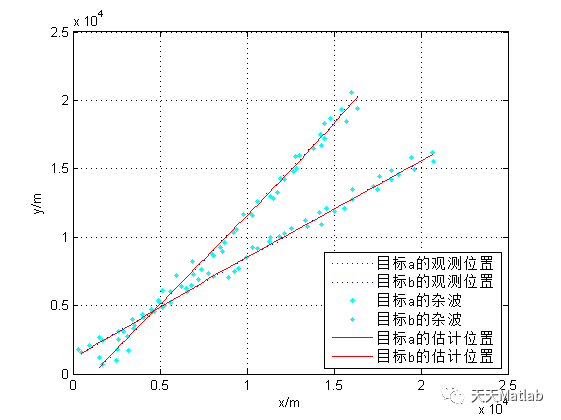
【滤波跟踪】最近邻算法多目标航迹关联【含Matlab源码 2093期】
⛄一、最近邻算法多目标航迹关联简介 1 引言 多传感器的航迹关联是多传感器信息融合系统中的关键技术之一,现有的航迹关联技术大多是在没有系统偏差情况下进行的。存在系统偏差会造成这些关联算法性能急剧下降。而有系统偏差的图像配准方法和基于目标参照拓扑的航迹关联方法,是基于航迹历史信息的航迹关联算法,实时性不高。提出的全局最近邻算法在无系统偏差情况下具有很好的关联效果,但在有系统偏差情况下,该算法会

论文阅读:基于CNN和Bi_LSTM的船舶航迹预测
论文阅读:基于CNN和Bi_LSTM的船舶航迹预测 论文下载:https://download.csdn.net/download/qq_33302004/15435812 目录 1. 摘要 2. 主要贡献 3. CNN-Bi-LSTM模型结构 4. 实验 1. 摘要 2. 主要贡献 ① 根据AIS数据,设计了一种混合深度学习网络预测船舶航迹预测方法。混合深度学习是指基于

论文阅读:基于 LSTM 的船舶航迹预测
论文阅读:基于 LSTM 的船舶航迹预测 论文下载地址:https://download.csdn.net/download/qq_33302004/15611798 目录 1. 摘要 2. 预测模型结构和流程 3. 实验结果 4. 有趣的想法 1. 摘要 2. 预测模型结构和流程 (1)输入与输出 输出:(t+1 )时刻的经度和纬度(预测目标) 输入:t 时刻以及前
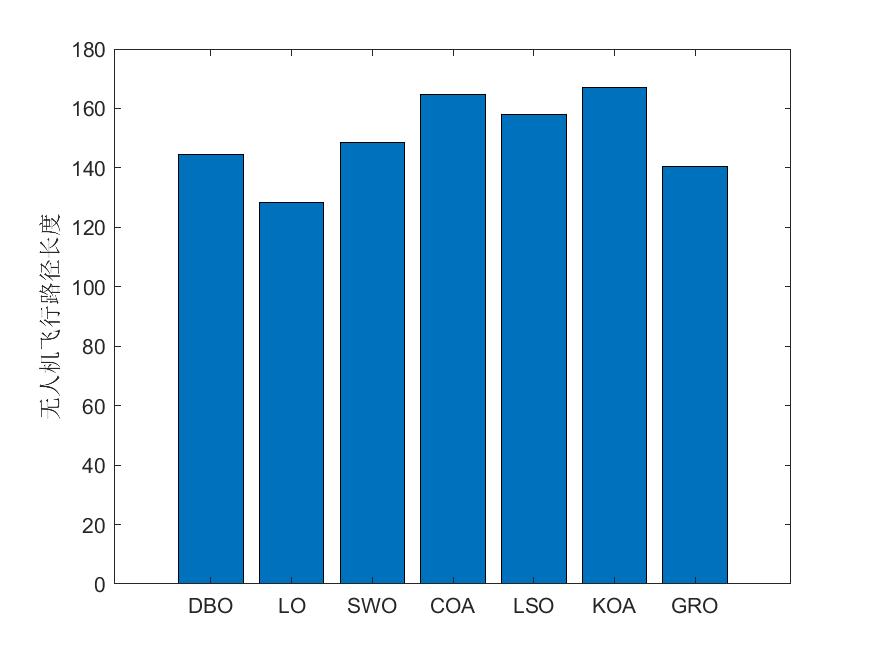
无人机航迹规划MATLAB:七种优化算法(DBO、LO、SWO、COA、LSO、KOA、GRO)求解无人机路径规划
一、七种算法(DBO、LO、SWO、COA、LSO、KOA、GRO)简介 1、蜣螂优化算法DBO 蜣螂优化算法(Dung beetle optimizer,DBO)由Jiankai Xue和Bo Shen于2022年提出,该算法主要受蜣螂的滚球、跳舞、觅食、偷窃和繁殖行为的启发所得。【精选】单目标优化:蜣螂优化算法(Dung beetle optimizer,DBO)_蜣螂算法_IT猿手的博客
【航迹关联】基于NNDA、PDA、JPDA三种算法实现航迹关联附matlab代码
1 简介 航迹融合处于信息融合系统JDL /DFS 五级功能模型的第二级,属于探测目标的位置级融合,目前该技术已在空、海战场监视系统中得到广泛的常态化值勤应用。航迹融合的主要任务之一,就是将源于同一目标的多条传感器航迹融合成为单一的、更精确的和更可信的系统航迹。在实际工作运行中,由于各雷达探测结果存在着系统误差,使得一个真实目标会产生多条位置“平行”或“交叉”的航迹。因此,在进行航迹融合处理时,

基于减法平均算法的无人机航迹规划-附代码
基于减法平均算法的无人机航迹规划 文章目录 基于减法平均算法的无人机航迹规划1.减法平均搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用减法平均算法来优化无人机航迹规划。 1.减法平均搜索算法 减法平均算法原理请参考:https://blog.csdn.net/u011

基于人工蜂鸟算法的无人机航迹规划-附代码
基于人工蜂鸟算法的无人机航迹规划 文章目录 基于人工蜂鸟算法的无人机航迹规划1.人工蜂鸟搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用人工蜂鸟算法来优化无人机航迹规划。 1.人工蜂鸟搜索算法 人工蜂鸟算法原理请参考:https://blog.csdn.net/u011

论文阅读:基于循环神经网络的船舶航迹预测
论文阅读:基于循环神经网络的船舶航迹预测 论文下载:https://download.csdn.net/download/qq_33302004/15421819 目录 1. 摘要 2. 主要贡献 3. 一些有趣的观点 4. 基于SSPD的数据预处理方法 5. GRU循环神经网络预测模型 6. 实验 1. 摘要 2. 主要贡献 提出了一种基于循环神经网络的船舶航迹预测