本文主要是介绍【航迹关联】基于NNDA、PDA、JPDA三种算法实现航迹关联附matlab代码,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 简介
航迹融合处于信息融合系统JDL /DFS 五级功能模型的第二级,属于探测目标的位置级融合,目前该技术已在空、海战场监视系统中得到广泛的常态化值勤应用。航迹融合的主要任务之一,就是将源于同一目标的多条传感器航迹融合成为单一的、更精确的和更可信的系统航迹。在实际工作运行中,由于各雷达探测结果存在着系统误差,使得一个真实目标会产生多条位置“平行”或“交叉”的航迹。因此,在进行航迹融合处理时,首先需要进行系统误差校正和时空配准等数据预处理工作。系统误差校正的方法有标定、瞄星、校飞等,一个正常运转的系统,必然需要对各传感器信息进行校正处理,然而随着使用过程或时间的推移,受多种因素影响,系统误差有可能重新生长,或者也会出现系统误差校正不彻底,存在系统误差“残差”的现象。当区域内目标间距较大,运动状态互不一 致时,航迹融合处理过程具有一定的“容错”能力,可以解决系统误差残差问题带来的影响,然而,当雷达的系统误差残差相比于目标间距已无法再被忽略时,例如多架飞机或多艘舰船联合编队运动时,目标间距较小,目标运动趋势相似,此时则会容易出现航迹关联错误的现象。
航迹融合中非常重要的一步就是如何判断来自不同传感器的两条航迹是否代表同一个目标,也就是航迹关联问题。用于航迹关联的算法有: 基于统计数学的方法、基于模糊数学的方法、基于灰色理论的方法、基于神经网络的方法等。无论采用哪类方法,都需要计算两条航迹之间的相似程度,通过比较相似度,选取适当的判断准则进行相关。
由于传感器测量误差、目标分布情况、目标运动规律及数据处理方法等因素的影响,特别是当系统包含有较大的导航、传感器校准及转换和延迟误差时,在航迹关联判决中存在着较大的模糊性,基于统计数学的方法有时会显得力不从心,而这种模糊性则可以用模糊数学的隶属度函数来表示,也就是说,可使用隶属度概念来描述两个航迹的相似程度。
本文即采用基于模糊数学的航迹关联方法,采取目标批量处理的方式,以其中一部雷达的源航迹作为基准航迹,其他雷达的源航迹分别与基准航迹相关联,使用正态型分布进行隶属度函数计算,利用高斯密度公式进行确认门内待关联源航迹的选择和似然值的计算。
2 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%generate data of target trajectory%Writed by Liangqun Li%Date:2006.4.21%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clear alln=50; %采样次数T=1; %T为采样间隔MC_number=10; %monte carlos run timestarget_position=[1.5 0.5 1.5 0.1]; %目标的起始位置和速度data_measurement1=zeros(2,n); %data_measurement观测值矩阵,data_measurement1实际位置矩阵Q=[0.0004 0;0 0.0004];Qdelta=sqrt(Q(1,1));data_measurement1(:,1,1)=target_position(1);data_measurement1(:,2,1)=target_position(3);for i=2:nif i~=1data_measurement1(1,i)=data_measurement1(1,1)+T*(i-1)*target_position(2)+rand(1)*Qdelta;data_measurement1(2,i)=data_measurement1(2,1)+T*(i-1)*target_position(4)+rand(1)*Qdelta; %实际位置 不考虑速度endendplot(data_measurement1(1,:),data_measurement1(2,:),'-');axis([0 30 1 7])
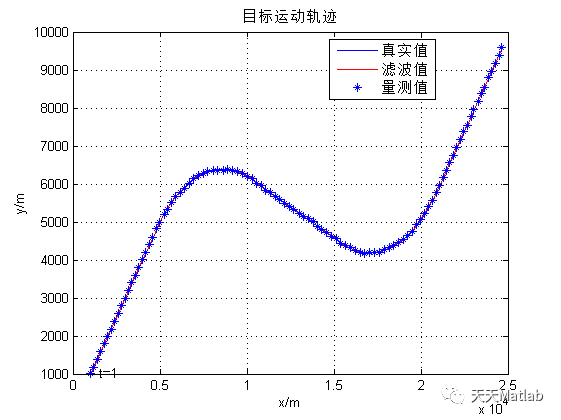
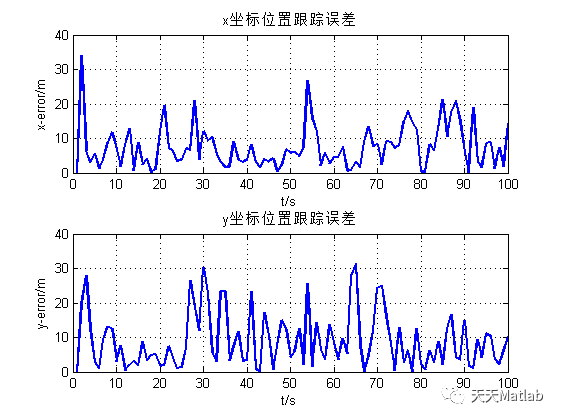
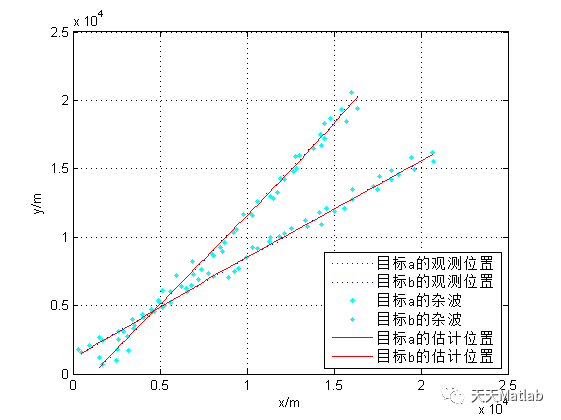
3 仿真结果


4 参考文献
[1]宁倩慧, 闫帅, 刘莉,等. 基于JPDA算法的多机动目标航迹跟踪研究[J]. 测试科学与仪器:英文版, 2016.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
这篇关于【航迹关联】基于NNDA、PDA、JPDA三种算法实现航迹关联附matlab代码的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






