端到专题
AI(文生语音)-TTS 技术线路探索学习:从拼接式参数化方法到Tacotron端到端输出
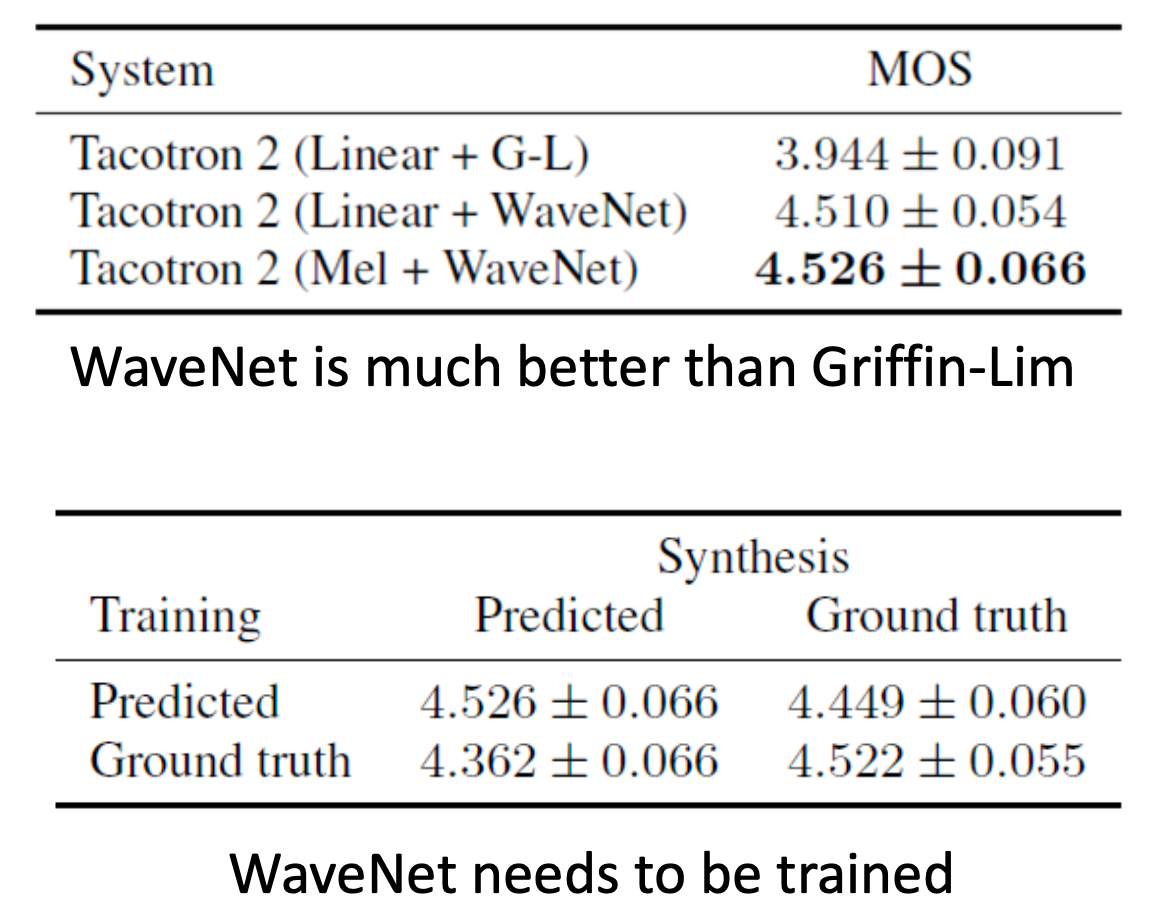
AI(文生语音)-TTS 技术线路探索学习:从拼接式参数化方法到Tacotron端到端输出 在数字化时代,文本到语音(Text-to-Speech, TTS)技术已成为人机交互的关键桥梁,无论是为视障人士提供辅助阅读,还是为智能助手注入声音的灵魂,TTS 技术都扮演着至关重要的角色。从最初的拼接式方法到参数化技术,再到现今的深度学习解决方案,TTS 技术经历了一段长足的进步。这篇文章将带您穿越时

深度学习|模型推理:端到端任务处理
引言 深度学习的崛起推动了人工智能领域的诸多技术突破,尤其是在处理复杂数据与任务的能力方面。模型推理作为深度学习的核心环节,决定了模型在真实应用场景中的表现。而端到端任务处理(End-to-End Task Processing)作为深度学习的一种重要范式,通过从输入到输出的直接映射,显著提升了任务处理的效率和精度。在传统机器学习中,特征提取、数据清理、模型选择等步骤需要独立处理,过程繁琐且

使用Cloudflare构建RAG应用;端到端语音开源大模型;AI幻灯片生成器,等六个开源项目
✨ 1: Cloudflare RAG 如何使用Cloudflare构建一个完整的RAG应用,结合多种搜索技术和AI服务。 Cloudflare RAG(Retrieval Augmented Generation)是一个全栈示例,展示如何使用 Cloudflare 构建 RAG 应用程序。该项目结合了 Cloudflare Workers、Pages、D1、KV、R2、AI Gate
InstantX团队新作!基于端到端训练的风格转换模型CSGO
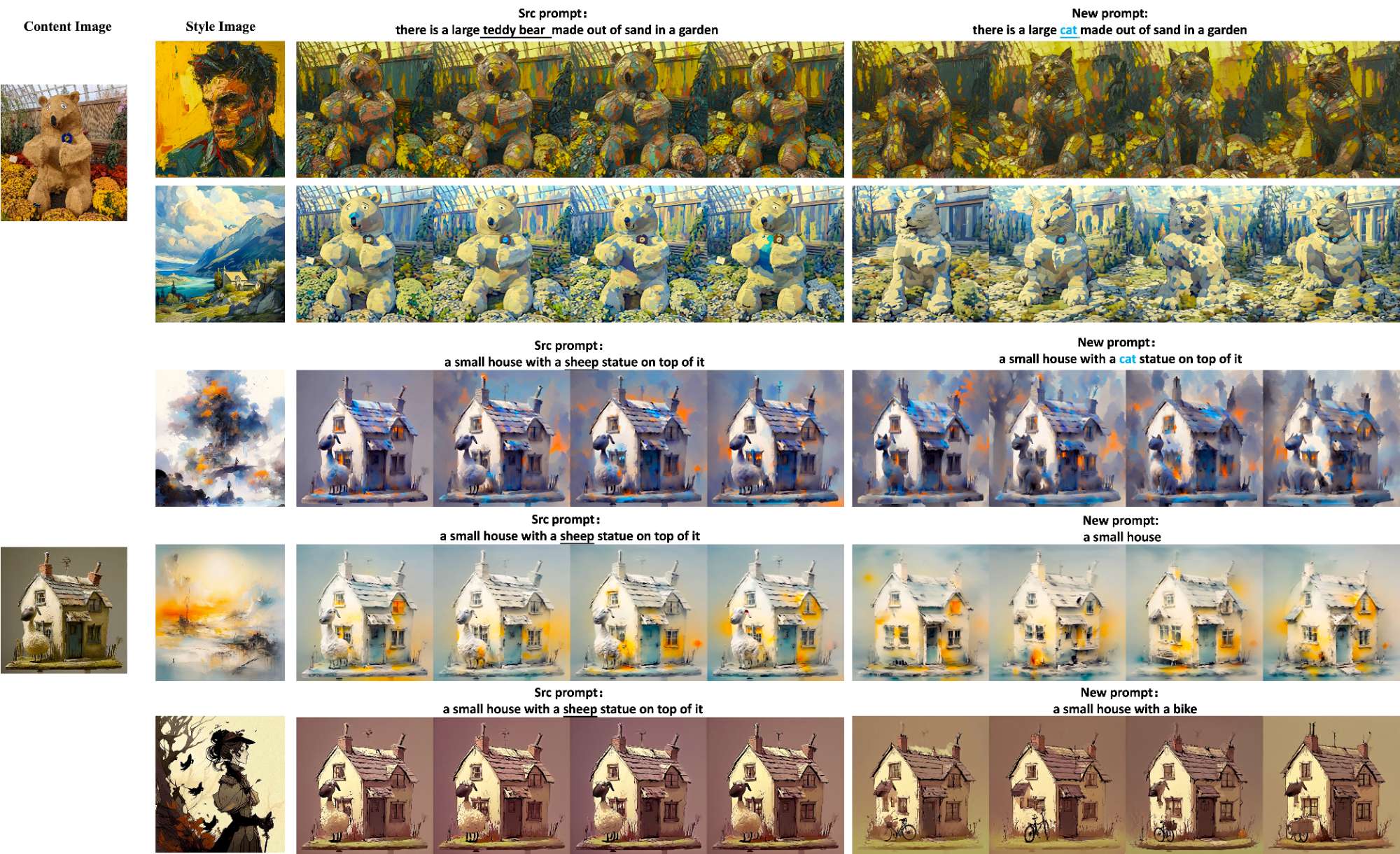
由InstantX团队、南京理工大学、北京航空航天大学以及北京大学联合提出了一种基于端到端训练的风格转换模型 CSGO,它采用独立的特征注入明确地解耦内容和风格特征。统一的 CSGO 实现了图像驱动的风格转换、文本驱动的风格化合成和文本编辑驱动的风格化合成。大量实验证明了该方法在增强图像生成中的风格控制能力方面的有效性。 CSGO 实现了高质量的(1)图像(草图和自然)驱动的风格转换、(2)

移动端视频编辑SDK,从移动端到桌面端的无缝衔接
美摄科技作为视频编辑技术领域的佼佼者,携其创新的移动端视频编辑SDK解决方案,正以前所未有的姿态,重新定义视频创作的边界,让每一位创作者都能轻松驾驭创意,实现从灵感闪现到作品呈现的无缝对接。 【一键解锁创意无限,模板应用尽在指尖】 美摄科技的移动端视频编辑SDK,集成了丰富多样的视频模板库,无论是炫酷动感的Vlog风格、温馨感人的生活记录,还是专业级别的商业广告,只需一键应用,即可让您的视频瞬

tensorflow LSTM+CTC实现端到端的不定长数字串识别
转载地址: https://www.jianshu.com/p/45828b18f133 上一篇文章tensorflow 实现端到端的OCR:二代身份证号识别实现了定长18位数字串的识别,并最终达到了98%的准确率。但是实际应用场景中,常常需要面对无法确定字串长度的情况,这时候除了需要对识别字符模型参数进行训练外,还需要对字符划分模型进行训练,本文实现了上文提到的方法2,使用LST

“精准学”官宣将公布中国首个语音端到端大模型
教育科技公司“精准学”宣布,公司已在AI语音交互技术上取得领先性的突破,成功训练了中国首个语音端到端大模型“心流知镜-s(V02)”,可直接实现语音输入-语音输出的交互,使其更适配辅学场景,使大模型达到“真人老师”级别的自然对话交流体验。 “心流知镜-s(V02)” 使用端到端语音结构,避免了级联ASR+LLM+TTS方式额外延迟,同时也更好的改善纯文本模型损失的情感节奏等丰富信息,接近人类

E2E 端到端测试学习 - E2E 介绍、Cypress 案例基本使用
E2E 测试介绍 E2E E2E(end to end)端到端测试是最直观可以理解的测试类型。在前端应用程序中,端到端测试可以从用户的视角通过真实浏览器自动检查应用程序是否正常工作。 E2E 把整个系统当作一个黑盒,测试人员模拟真实用户在浏览器中操作 UI,测试在真实浏览器环境运行测试,测试出的问题可能是前端也可能是后端导致的,比如: 用户登录注册加入购物车订单结算… E2E 测试一般是

端到端的自动驾驶--论坛分析
从Tesla开始,越来越多的企业和研究机构开始投身于端到端的自动驾驶模型,但是目前端到端的缺点是黑盒、不可读、不可解释。观看一些讲解和论坛后,个人觉得可解释的端到端模型将是未来的趋势。 视觉语言–大模型可以提供一些场景下的决策; 目前预测模块制约了自动驾驶的发展,感知相对稳定,规划控制也可以实时的计算出运动轨迹,不同的决策约束了不同的ROI区域,从而限制了相关的规划轨迹求解。 视觉语言模型,缺点是
如何在这种异构、动态的环境中构建端到端、一致的边缘体验?
🐯 如何在这种异构、动态的环境中构建端到端、一致的边缘体验? How do we build an end-to-end, consistent edge experience out of this heterogeneous, dynamic landscape? 摘要 📄 在当今科技飞速发展的时代,边缘计算成为了重要的技术趋势。无论是初学者还是资深开发者,本文将带你深入了解如何在异构

端到端OCR实验记录
文章目录 1. 采用crnn的主网络,采用roi_pooling,2. 采用crnn的主网络,采用ocr_roi_pooling3. 采用crnn的主网络,采用ocr_roi_pooling 1. 采用crnn的主网络,采用roi_pooling, 采用的crnn的主网络进行特征提取,高度方向/16,宽度方向/4,然后在一张图片中有两个文本区域。特征提取完成之后,采用faste

FOTS端到端OCR论文阅读
3.2 文字识别部分 采用RoIRotate将文字区域输出为固定高度,不同长度的图片,并保持长宽比不变。示意图如下: 同时这里采用的是双线性插值方式实现的(有点像roi align)。 同时论文提到将特征映射填充到最大宽度,在损失函数中忽略填充部分。 此外,不像图像分类,文字识别对检测结果非常敏感,一点的检测误差就会切掉几个像素,这对识别网络是非常有害的。所以训练的时候用的是标注数据
](https://img-blog.csdnimg.cn/direct/64f3f6aa429e49b39466a38e94377f43.png)
【传知代码】DETR[端到端目标检测](论文复现)
前言:想象一下,当自动驾驶汽车行驶在繁忙的街道上,DETR能够实时识别出道路上的行人、车辆、交通标志等目标,并准确预测出它们的位置和轨迹。这对于提高自动驾驶的安全性、减少交通事故具有重要意义。同样,在安防监控、医疗影像分析等领域,DETR也展现出了巨大的应用潜力,如今,一项名为DETR(Detection Transformer)的创新技术,犹如一股清流,为这一领域带来了革命性的变革。DETR,

端到端目标检测 |从DETR 到 GroundingDINO
文章目录 一,DETR1. 简介2. 亮点3. 细节4. 总结一下 二,GroundingDINOGrounding DINO的整体流程Grounding DINO的目标函数 一,DETR 之前的目标检测框架,需要很多的人工干预,很多的先验知识,而且可能还需要很复杂的普通的库不支持的一些算子。 DETR 既不需要proposal, 也不需要anchor,用transfor
YOLOv10 | 无NMS的YOLO | 实时端到端目标检测的新突破
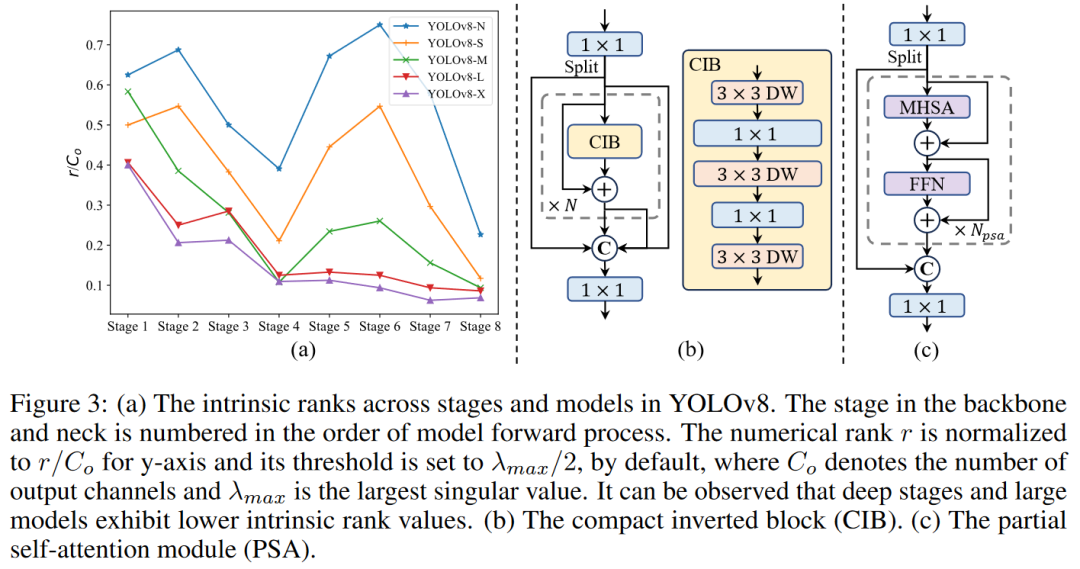
过去几年里,YOLOs因在计算成本和检测性能之间实现有效平衡而成为实时目标检测领域的主流范式。研究人员针对YOLOs的结构设计、优化目标、数据增强策略等进行了深入探索,并取得了显著进展。然而,对非极大值抑制(NMS)的后处理依赖阻碍了YOLOs的端到端部署,并对推理延迟产生负面影响。此外,YOLOs中各种组件的设计缺乏全面和彻底的审查,导致明显的计算冗余并限制了模型的性能。这导致次优的效率,以及性
YOLOV10实时端到端目标检测
代码地址:GitHub - THU-MIG/yolov10: YOLOv10: Real-Time End-to-End Object Detection 论文地址:https://arxiv.org/pdf/2405.14458 本文介绍了YOLO系列目标检测器在实时和高效方面的优势,但是仍然存在一些缺陷,包括依赖非极大值抑制(NMS)后处理导致部署效率降低,以及模型架构设计还有待进
如何使用 JUnit 和多个服务运行端到端测试
如何使用 JUnit 和多个服务运行端到端测试 问题背景 在尝试使用 JUnit 和 RestTemplates 运行端到端测试时,面对多模块 Spring/Maven 项目,遇到了一些依赖冲突问题。项目结构如下: txt parent|-- service-1|-- service-2|-- service-3|-- integration-test integration-t

看Diffusion模型如何提升端到端自动驾驶的能力
文章链接:https://openreview.net/pdf?id=yaXYQinjOA 自动驾驶领域在分割和规划模型性能方面取得了显著进展,这得益于大量数据集和创新的架构。然而,这些模型在遇到罕见子群,比如雨天条件时,往往表现不佳。获取必要的大规模和多样化数据集以改善在这些子群中的泛化能力,进一步受到手动标注的高成本和工作量的阻碍。 为了解决这个问题,本文引入了SynDiff-AD
Flink 全链路端到端延迟的测量方法
点击上方“zhisheng”,选择“设为星标” 后台回复”ffa“可以查看 Flink 资料 一、背景 FLink Job端到端延迟是一个重要的指标,用来衡量Flink任务的整体性能和响应延迟(大部分流式应用,要求低延迟特性)。 通过流处理引擎竞品对比,我们发现大部分流计算引擎产品,都在告警监控页面,集成了全链路时延指标展示。 一些低延时的处理场景,例如用于登陆、用户下单规则检测,实时预测场景,
构建端到端数据科学项目,从我的Data Scientist Ideal Profiles项目中学习(附链接)...
翻译:张睿毅;校对:吴金笛 本文约1500字,建议阅读5分钟。 本文为你介绍了构建数据科学项目中重要的思维能力及训练建议。 Joseph Barrientos 拍照于 Unsplash (链接:https://unsplash.com/photos/Ji_G7Bu1MoM?utm_source=unsplash&utm_medium=referral&utm_content=creditCop

漏洞端到端管理小总结
漏洞端到端管理最佳实践涵盖了从漏洞的发现、分析、修复到监控的整个过程,确保组织能够及时发现并应对安全威胁。以下是一些建议的最佳实践: 发现与评估: 资产识别与分类:对组织的所有网络资产进行彻底清查,包括但不限于硬件、软件、应用程序、数据库和端点。对这些资产进行分类,并记录其相关的漏洞、配置、补丁状态以及合规状态。定期扫描:使用自动化工具定期执行漏洞扫描,确保能够及时发现新出现的漏洞。风险评估:对

Altair® RapidMiner® 数据分析与人工智能平台,端到端统一数据科学平台
Altair® RapidMiner® 数据分析与人工智能平台,端到端统一数据科学平台 无论您的组织处于数据旅程的哪个阶段,Altair RapidMiner 都能帮助您克服前进道路上的挑战性障碍。我们为成熟的数据分析团队提供现代化之路,也为刚刚起步的团队提供自动化之路。我们不需要您的组织从根本上改变人员、流程、计算环境或现有数据状况,帮助您实现数据目标,而无需改变您的身份或现有数据。 无论您

字节跳动端到端深度学习召回算法
来源:DataFunTalk本文约2600字,建议阅读5分钟本文为你介绍字节跳动AML Team在大规模推荐中构建的可学习的索引结构。 [ 导读 ] 传统的召回算法一般基于双塔结构并加以approximately nearest neighbor search (ANN) 或者maximum inner productive search (MIPS),比如fast ball tree (

端到端测试框架Cypress简介
初识Cypress Cypress (https://www.cypress.io/)是一款功能强大的端到端的Web 测试框架。相比于其他类似最大的特点就是有个可视化的UI界面,调试起来相当直观方便。使用的时候要按业务需要写一些测试用例就可以用带界面或者纯命令行模式来跑了。 安装 Cypress依赖于node js 环境,估计做web 开发的人都是有的。Cypress本身可以用npm安装在目

高精度端到端在线校准环视相机和LIDAR(精度0.2度内!无需训练数据)
高精度端到端在线校准环视相机和LIDAR(精度0.2度内!无需训练数据) 附赠自动驾驶学习资料和量产经验:链接 写在前面 在自动驾驶车辆的使用寿命内,传感器外参校准会因振动、温度和碰撞等环境因素而发生变化。即使是看似无害的 camera-lidar 外参校准值有一两度的误差,也可能给高级的 camera-lidar 感知功能引入灾难性的故障。 连续在线外部校准(COEC)在自动驾驶
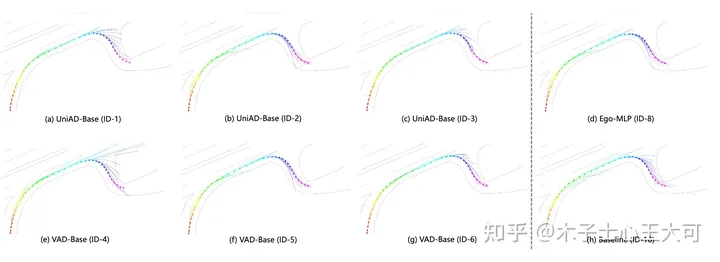
开环端到端自动驾驶: 到底行不行
开环端到端自动驾驶: 到底行不行 附赠全面专业的自动驾驶学习资料:直达链接 TLDR: 别在nuScenes上做开环端到端自动驾驶刷点了。 论文: https://arxiv.org/pdf/2312.03031.pdf github: https://github.com/NVlabs/BEV-Planner 前言 UniAD[1]获得CVPR Best Paper Award后毫无