稠密专题

自然语言处理(NLP)-第三方库(工具包):Faiss【向量最邻近检索工具】【为稠密向量提供高效相似度搜索】【多种索引构建方式,可根据硬件资源、数据量选择合适方式】【支持十亿级别向量的搜索】
一、Faiss介绍 Faiss是Facebook AI团队开源的针对聚类和相似性搜索库,为稠密向量提供高效相似度搜索和聚类,支持十亿级别向量的搜索,是目前最为成熟的近似近邻搜索库。它包含多种搜索任意大小向量集(备注:向量集大小由RAM内存决定)的算法,以及用于算法评估和参数调整的支持代码。Faiss用C++编写,并提供与Numpy完美衔接的Python接口。除此以外,对一些核心算法提供了GPU实

Convolutional layers/Pooling layers/Dense Layer 卷积层/池化层/稠密层
Convolutional layers/Pooling layers/Dense Layer 卷积层/池化层/稠密层 Convolutional layers 卷积层 Convolutional layers, which apply a specified number of convolution filters to the image. For each subregion, the

动手学深度学习7.7. 稠密连接网络(DenseNet)-笔记练习(PyTorch)
本节课程地址:本节无视频 本节教材地址:7.7. 稠密连接网络(DenseNet) — 动手学深度学习 2.0.0 documentation (d2l.ai) 本节开源代码:...>d2l-zh>pytorch>chapter_multilayer-perceptrons>densenet.ipynb 稠密连接网络(DenseNet) ResNet极大地改变了如何参数化深层网络中函数

光流 | 基于HS光流算法的稠密光流提取(Matlab源代码)
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 直接上效果

【深度学习笔记】稠密连接网络(DenseNet)
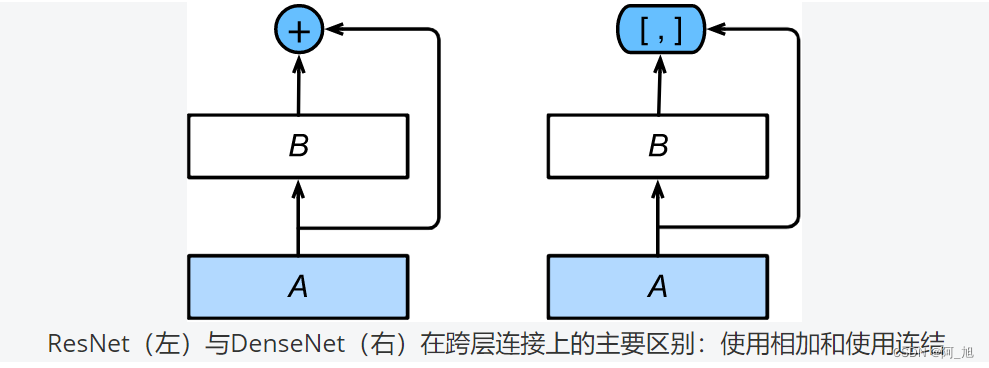
注:本文为《动手学深度学习》开源内容,部分标注了个人理解,仅为个人学习记录,无抄袭搬运意图 5.12 稠密连接网络(DenseNet) ResNet中的跨层连接设计引申出了数个后续工作。本节我们介绍其中的一个:稠密连接网络(DenseNet) [1]。 它与ResNet的主要区别如图5.10所示。 图5.10 ResNet(左)与DenseNet(右)在跨层连接上的主要区别:使用相

UVa 10034 Freckles (MST 稠密图的O(V^2)的Prim算法)
10034 - Freckles Time limit: 3.000 seconds http://uva.onlinejudge.org/index.php?option=com_onlinejudge&Itemid=8&category=116&page=show_problem&problem=975 纯模板题。 完整代码: /*0.019s*/#include<

搜索中关于稀疏检索和稠密向量检索的召回效果比较
不同检索方式说明 最近在做搜索召回提升相关的研究工作。对比了稀疏检索和稠密向量检索的效果。其中使用的搜索引擎为elasticsearch8.x版本。稀疏检索包括BM25的检索方式,以及es官方在8.8之后版本提供的稀疏向量模型的方式。稠密向量检索,是指借助机器学习的模型做文本嵌入,然后用es8.x以后版本提供的向量检索。 测试数据说明 测试数据包括了中文和英文,涉及了法律和新闻数据。
中科大何向南团队+快手App联合出品 KuaiRec | 快手首个稠密为99.6%的数据集 | 相关介绍、下载、处理、使用方法
文章目录 1. 数据集介绍1.1 相关链接:1.2 构建方法1.3 代表性验证1.4 相关实验 2. 数据集下载2.1 big matrix2.1 small matrix2.3 item_feat2.4 social_network2.5 注意点 3. 数据集处理3.1 数据集读取3.2 划分训练集测试集3.3 拼接物品属性3.4 转换成稀疏矩阵3.5 social network处理

使用自己的TUM数据集来实现ORBSLAM稠密建图
简介 项目链接:https://github.com/LeonardoDiCaprio1/Map_ORBSLAM_ROS奥比中光ROS功能驱动包:https://github.com/LeonardoDiCaprio1/astra_camera笔者参照很多大佬的文章和相关代码并添加了一些功能而且最终编译出来,现在分享给大家 硬件设备 奥比中光深度相机(Astra)笔记本电脑(AMD)
最短路各种算法 稠密图 稀疏图 时间分析
分别有下面这几种算法(heap写了好久 T T 。。) 其中未注明LIST的SPFA 和 dij 是邻接矩阵的形式。 heap是手写的堆,邻接表存图。priority指的是调用C++里的STL。 Dijkstra Dijkstra_priority Dijkstra_List Dijkstra_

实测 (二)NVIDIA Xavier NX + D435i / 奥比中光Astrapro 相机+ ORB-SLAM 2 + 3 稠密回环建图
开发环境:NX+Ubuntu18.04+ROS-melodic 接着上篇,开始orb-slam2稠密回环建图 二、NX + D435i + ORB-SLAM2 稠密回环建图 先上效果图 这里感谢大神提供一个可回环的稠密地图版本: https://github.com/xiaobainixi/ORB-SLAM2_RGBD_DENSE_MAP.git 2.1 安装依赖(和orb-s
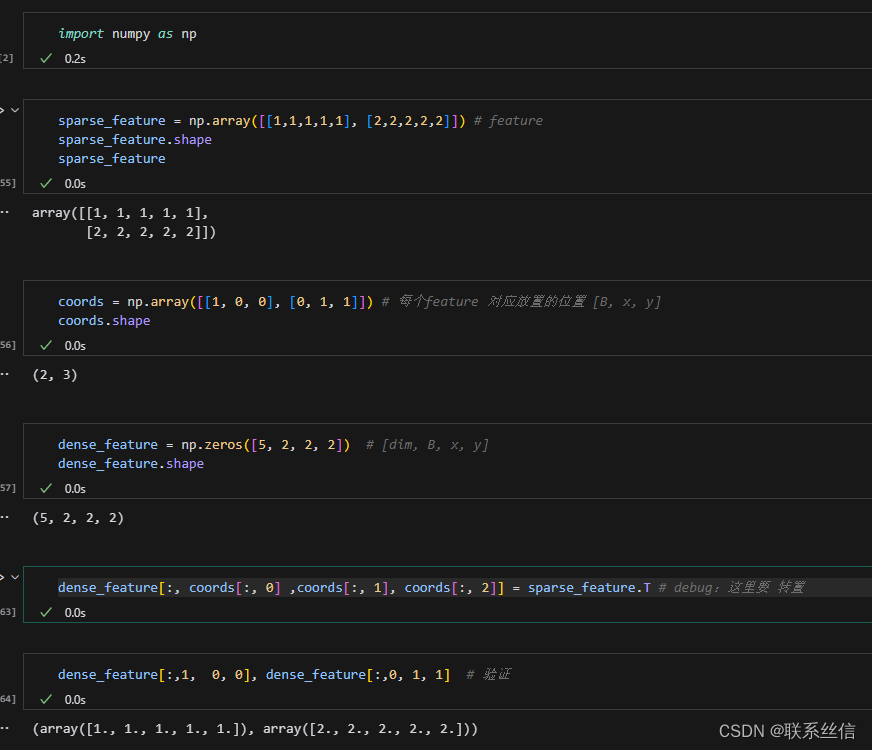
【代码学习】voxel 或者 pillar,稀疏张量 转 稠密张量 的代码理解,理解了很久
需要 feature 和 对应 的坐标 coords debug:转置,不然维度不匹配! 对应的代码,向量化 应该 比 for循环快 def voxel_indexing(self, sparse_features, coords): # sparse_features: [N, C], coords:[N, 4]dim = sparse_features.shape[-1]dens

安装voxblox构建稠密地图踩坑:
安装voxblox: 参照链接:https://voxblox.readthedocs.io/en/latest/pages/Installation.html 依赖包github下载会很慢,博主已经下载放在了https://download.csdn.net/download/neptune4751/13144410 sudo apt-get install python-wstool p


BundleFusion在win10环境下使用Realsense D435i相机实现室内实时稠密三维重建
BundleFusion在win10环境下使用RealSense D435i相机实现室内实时稠密三维重建 网上很多教程说明必须在使用vs2013+cuda8.0才能配置成功,经过本人研究在vs2013和vs2019环境下均能配置成功。同时在配置中有一个中重要的发现,RTX显卡和GTX显卡环境配置中存在差异,RTX显卡下生成的FriedLiver.exe存在无响应问题,具体解决办法如下。 1、配
【从零开始学习深度学习】32. 卷积神经网络之稠密连接网络(DenseNet)介绍及其Pytorch实现
目录 1. 稠密块介绍及其实现2. 过渡层定义3. 构造DenseNet模型4. 获取数据并训练DenseNet模型5. 总结 稠密连接网络(DenseNet)是在ResNet网络的基础上进行改进的。对比如下: 上图中将部分前后相邻的运算抽象为模块 A A A和模块 B B B。与ResNet的主要区别在于,DenseNet里模块 B B B的输出不是像ResNet那样和模

slam稠密建图以及构建octomap
之前总说ORB-SLAM2构建的稀疏地图,只是为了定位用的,想要使用地图导航或是别的还是得搞稠密地图,然后就运行了高翔博士改的稠密建图版本。 虽然效果看起来好看了一点,还是不知道怎么个用法,因此还需要整成八叉树地图,具体怎么整 见下方博客 https://blog.csdn.net/crp997576280/article/details/74605766 按照他的方法基本没有问题 但是

稠密点云获取方法(二)
作为高分辨率三维重建的方法之一,从单张图像生成稠密三维点云在计算机视觉领域中一直有着较高的关注度。 以下文献提出了一种针对二维和三维信息融合的方法以解决三维点云稀疏难以检测远处的目标的问题。 Multimodal Virtual Point 3D Detection 该文献提出一种将 RGB 传感器无缝融合到基于激光雷达的 3D 识别的方法。它采用一组二维检测来生成密集的三维虚拟点,以增

【论文泛读】 DenseNet:稠密连接的卷积网络
【论文泛读】 DenseNet:稠密连接的卷积网络 文章目录 【论文泛读】 DenseNet:稠密连接的卷积网络摘要 Abstract介绍 Introduction相关工作 Related WorkDenseNetResNet稠密连接(Dense connectivity)组合函数(Composite function)池化层(Pooling layers)增长速率(Growth rate