深蓝专题

聚观早报 | 深蓝G318价格发布;比亚迪方程豹豹3官图发布
聚观早报每日整理最值得关注的行业重点事件,帮助大家及时了解最新行业动态,每日读报,就读聚观365资讯简报。 整理丨Cutie 6月15日消息 深蓝G318价格发布 比亚迪方程豹豹3官图发布 夸克App升级高考AI搜索 iOS 18卫星通信实测 Redmi K70至尊版外观设计曝光 深蓝G318价格发布 近日,深蓝G318揭晓价格,其官方指导售价区间从17.59万元至3
【深蓝学院】移动机器人运动规划--第5章 最优轨迹生成--笔记
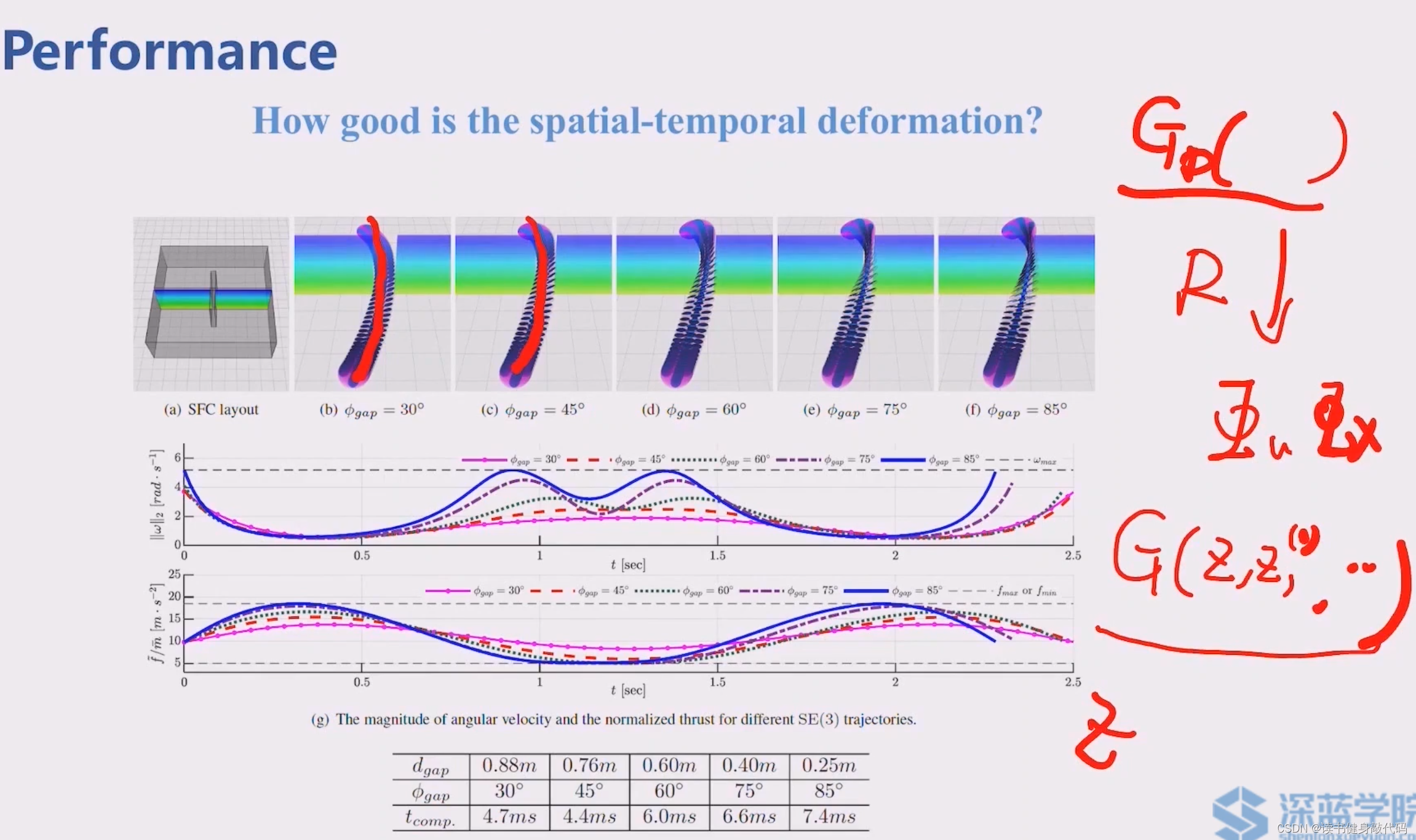
文章目录 1. Preliminaries2. Multicopter dynamics and differential flatness(多旋翼动力学和微分平坦特性)2.1 Differential Flatness2.2 具体建模2.3 Flatness Transformation的解析推导 3. Trajectory Optimization轨迹优化3.1 Problem form
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--笔记
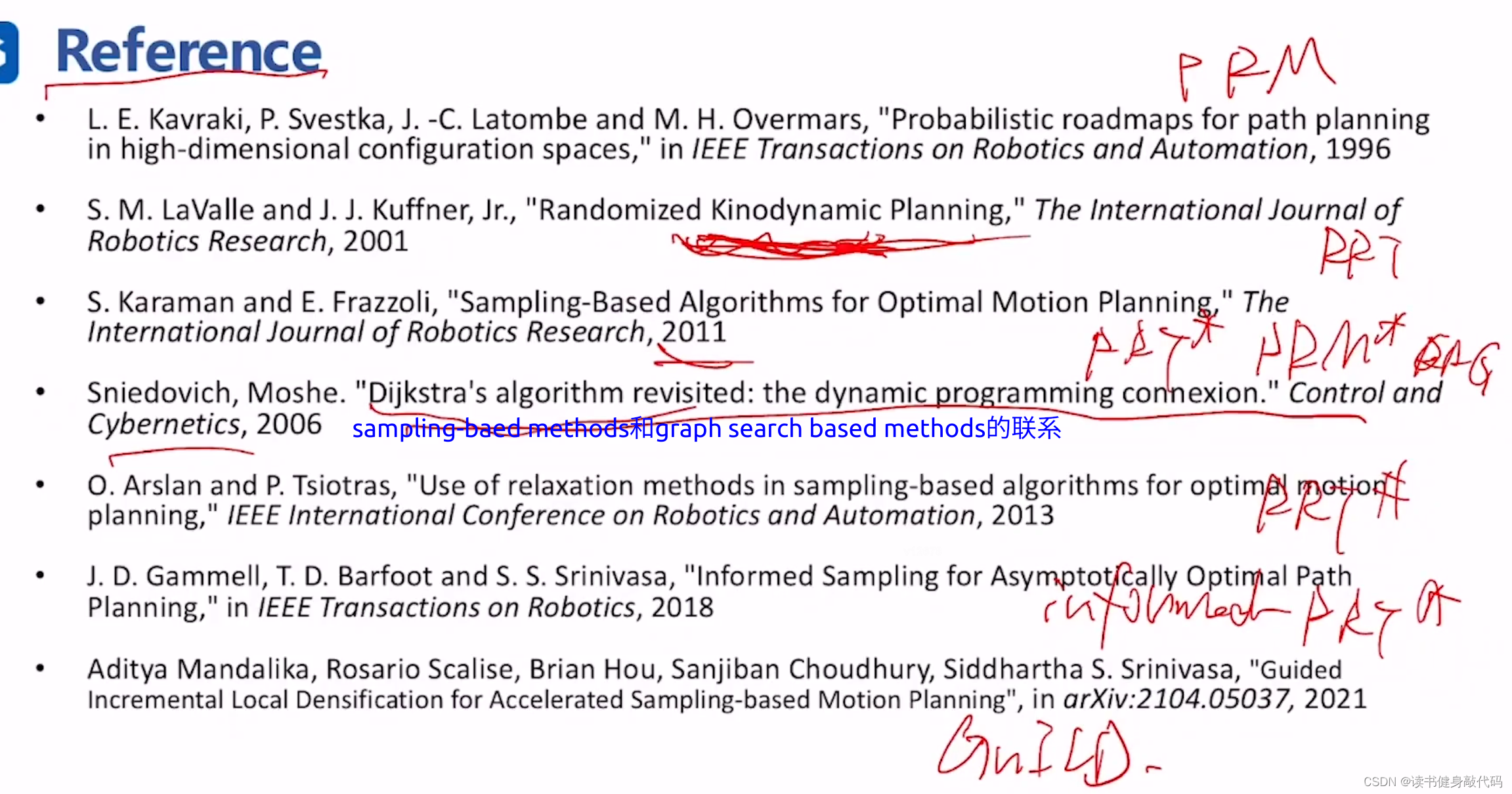
0. Preliminaries 做规划都是将WS转到C space下进行。 找到可行解和最优解(这两个不同) 通过增量或者批次地在C-space中采样来增量式地构建树或者图。 不显式地构造 如果把整个规划问题看成一个大的优化问题,那么大问题可以拆分成小问题进行求解。 整个规划问题可以分为两个基本的tasks:Explotration和Exploitation Explotratio
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--作业
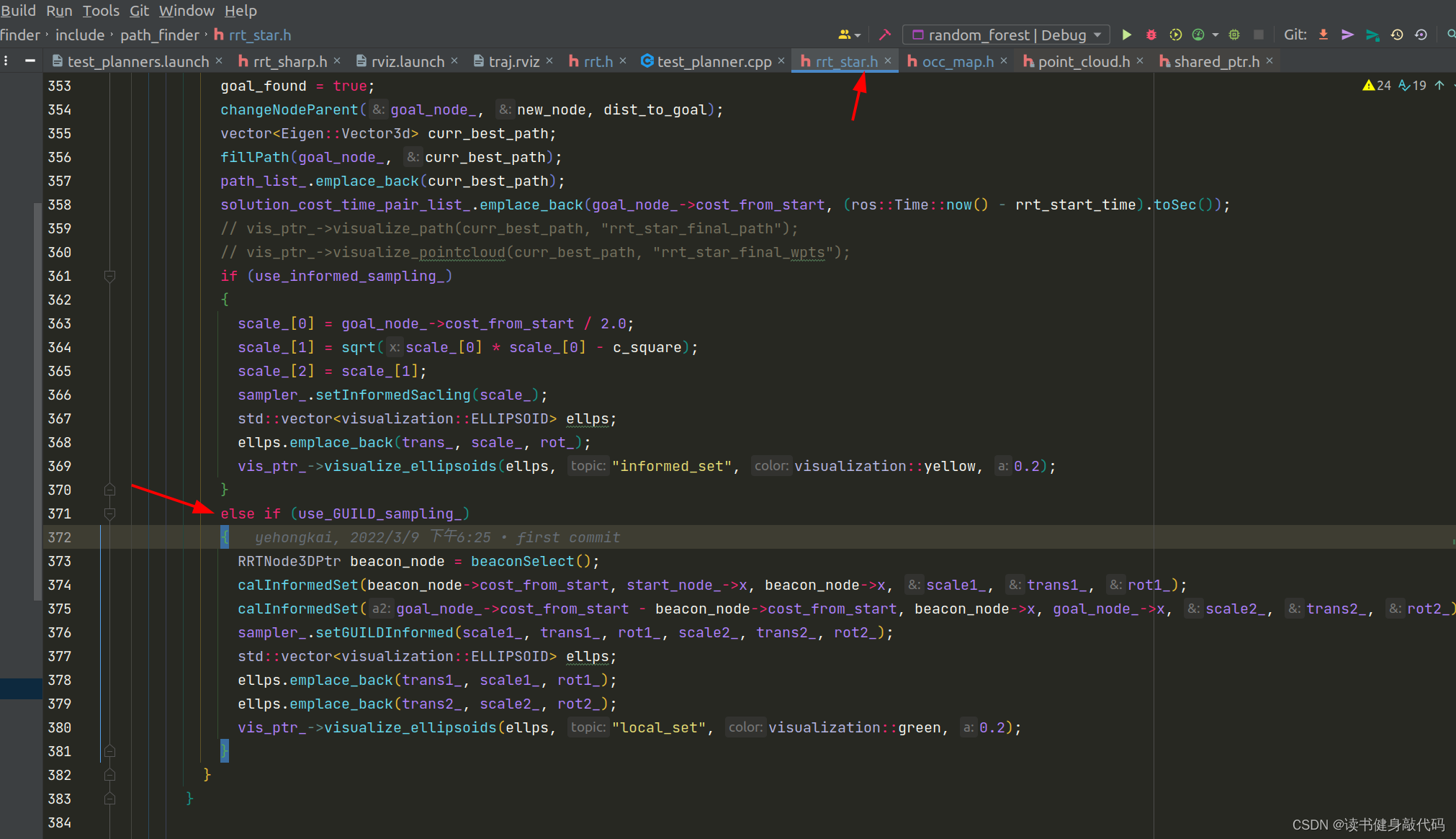
0. Assignment T1. MATLAB实现RRT 1.1 GPT-4任务分析 RRT伪代码: 任务1即使用matlab实现RRT,结合作业所给框架,简单梳理,可结合1.2代码理解: 设置start,goal,near to goal threshold Thr,step的步长DeltaTree初始化,数据结构:2D xy坐标,父节点xy坐标,父节点到该节点距离,父节点
【深蓝学院】移动机器人运动规划--第4章 动力学约束下的运动规划--笔记
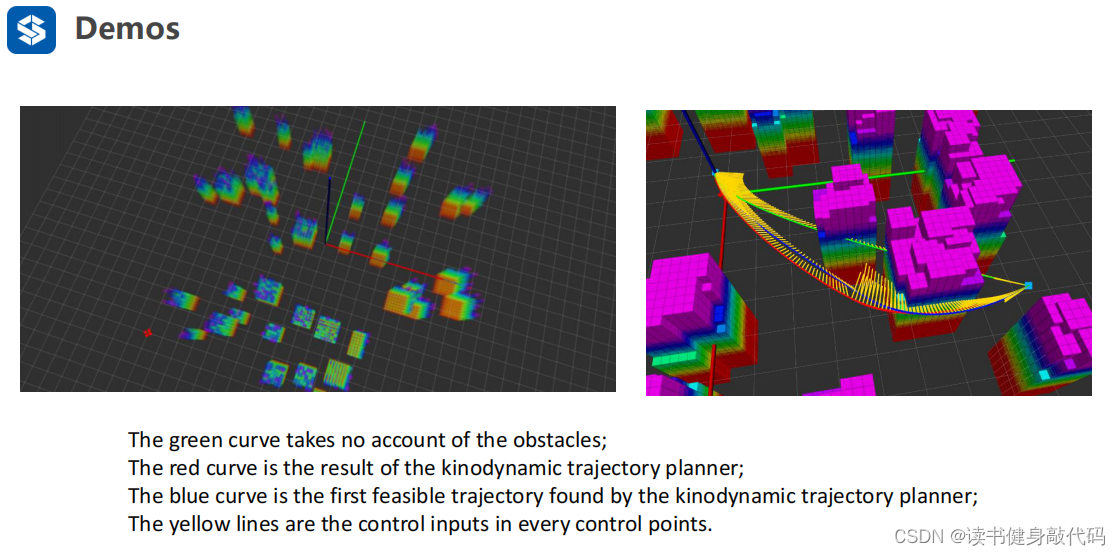
0. Outline 1. Introduction 什么是kinodynamic? 运动学(Kinematics)和动力学(Dynamics)都是力学的分支,涉及物体的运动,但它们研究的焦点不同。 运动学专注于描述物体的运动,而不涉及运动的原因。它包括位置、速度、加速度等概念,并研究这些量之间的关系,以及它们如何随时间变化。运动学问题通常涉及计算物体在没有引力或其他力的作用下的理想

深蓝学院C++ Project 4 文字版挂机地牢探险游戏的设计 代码
写在前面 调试了周末的半天,算是夯实c++基础与深度解析类的实战,对virtual函数等都有了更好的理解 本机环境visual studio2019 如下图 项目一共有两个文件 下面是代码详情,方便大家参考,毕竟我做的时候找了好久也没找打这个项目的完全版本,算是帮大家加深理解,这个项目可能有一些小bug还没细致排查,至少目前没发现,后续再深入改造。代码如下

人工智能几个关键节点:深蓝,AlphaGo,ChatGPT,Sora
近30年,人工智能几个关键节点:深蓝,AlphaGo,ChatGPT,Sora 深蓝: 1997年,深蓝击败卡斯帕罗夫的比赛是通过一系列复杂的算法和策略实现的。深蓝的开发团队使用了一种名为“暴力搜索”的技术,即计算机会评估所有可能的走法,并选择最优的一种。此外,深蓝还利用了一些国际象棋领域的特定知识和规则,以及从以前的比赛中获得的经验和数据。 AlphaGo 2016年,AlphaG
【深蓝学院】移动机器人运动规划--第4章 动力学约束下的运动规划--作业
文章目录 1. T11.1 题目1.2 求解1.3 Pontryagin Minimum Principle 的拓展 2. T22.1 题目2.2 求解 3. Reference 1. T1 1.1 题目 1.2 求解 1.3 Pontryagin Minimum Principle 的拓展 2. T2 2.1 题目 2.2 求解
【深蓝学院】移动机器人运动规划--第4章 动力学约束下的运动规划--笔记
0. Outline 1. Introduction 什么是kinodynamic? 运动学(Kinematics)和动力学(Dynamics)都是力学的分支,涉及物体的运动,但它们研究的焦点不同。 运动学专注于描述物体的运动,而不涉及运动的原因。它包括位置、速度、加速度等概念,并研究这些量之间的关系,以及它们如何随时间变化。运动学问题通常涉及计算物体在没有引力或其他力的作用下的理想

新浪出输入法了,深蓝词库转换更新到1.3.1——增加对新浪拼音输入法的支持
新浪最近出了自己的输入法,具体介绍我就不说了,参见这里。由于之前一直做深蓝词库转换的工具,目前已经支持了大部分主流的输入法词库的转换,既然出了一个新的输入法,那么肯定要增加对这个输入法的词库的支持了。 新浪输入法虽然才发布第一个版本,功能还不够强大,但是幸好支持了词库的导入和导出功能(我目前拿到的是0.9内测版,1.0正式版由于网站挂了,没有下载到,词库功能上应该不会有什么变化)。如果我们想尝鲜

深蓝词库转换1.3版本发布——增强单词注音功能
“深蓝词库转换”是我在闲暇时写的一个词库转换程序,实现了各种输入法的用户词库、网络词库(细胞词库)之间的相互转换。 目前支持的输入法有: PC端: *搜狗拼音 *QQ拼音 *QQ五笔(纯汉字) *谷歌拼音 *搜狗五笔 *紫光拼音 *拼音加加 手机端: *QQ手机拼音 *百度手机拼音 由于工作和个人的原因,所以深蓝词库转换很久很久没有更新了,趁着这个国庆有时间,所以对该小
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--作业
0. Assignment T1. MATLAB实现RRT 1.1 GPT-4任务分析 RRT伪代码: 任务1即使用matlab实现RRT,结合作业所给框架,简单梳理,可结合1.2代码理解: 设置start,goal,near to goal threshold Thr,step的步长DeltaTree初始化,数据结构:2D xy坐标,父节点xy坐标,父节点到该节点距离,父节点
【深蓝学院】移动机器人运动规划--第3章 基于采样的路径规划--笔记
0. Preliminaries 做规划都是将WS转到C space下进行。 找到可行解和最优解(这两个不同) 通过增量或者批次地在C-space中采样来增量式地构建树或者图。 不显式地构造 如果把整个规划问题看成一个大的优化问题,那么大问题可以拆分成小问题进行求解。 整个规划问题可以分为两个基本的tasks:Explotration和Exploitation Explotratio

深蓝航天完成首次火箭发动机全飞行时序三次起动整机试车 是液体火箭回收复用重要节点...
模拟真实发射全过程,实现了可回收发动机试车的关键里程碑。 雷递网 雷建平 8月30日 2023年8月深蓝航天液体运载火箭“星云-1”配套的液氧煤油发动机“雷霆-R1”,取得了全飞行时序三次起动整机试车的圆满成功。该次试车全面覆盖了“星云-1”运载火箭入轨+一子级回收的全飞行剖面。 本次试车中,“雷霆-R1”发动机在地面试车台上,按照“星云-1”回收复用运载火箭一子级设定的飞行弹道,进行了完整

看深蓝学院多传感器融合课程的笔记
贝叶斯推断和贝叶斯公式是整个卡尔曼的核心。 贝叶斯滤波比卡尔曼滤波比卡尔曼滤波更宽泛。 误差作为状态量 融合工程师很多时候是调参工程师,卡尔曼滤波的Q R,需要调参  掌握观测方程的推导。13章第一节。 掌握了这个方法无论推导什么东西都变得异常的简单。 预积分的作用就是提高效率,不是为了提高精度。做预积分就是为了不重新积分。 两个不互补,而且一个准一个不准,那就选一个,不用互补。 干的四件

推荐一款调试工具:深蓝串口网络调试工具2023春季版 长期支持版(2.18.24 LTSC),一直使用这个,更新好快,最近又出新版本了
深蓝串口网络调试工具2023春季版 深蓝串口网络调试工具2023春季版波形发生器 深蓝串口网络调试工具2023春季版波形发生器 深蓝串口网络调试工具2023春季版示波器帧头自定义 深蓝串口网络调试工具2023春季版自定义发送编码方式 深蓝串口网络调试工具2023春季版自定义接收编码方式 深蓝串口网络调试工具2023春季版指令表 深蓝串口网络调试工具2023春季版

推荐一款调试工具:深蓝串口网络调试工具(ACOM)2023春季版(2.18.12.30202),一直使用这个,最近更新好快。
深蓝串口网络调试工具(ACOM)2023春季版(2.18.12.30202) 此应用程序支持1M波特率(最高有效波特率受硬件设置的限制)、串口数据采集、文本模式发送与接收、HEX模式发送与接收、报文模式,数据模式,数据管理功能,数据导出至EXCEL报表。具体功能如下: 软件功能 1.串口数据收发、 2.TCP/IP服务器; 3.UDP/IP服务器; 4.

推荐一款调试工具:深蓝串口调试工具 2019夏季版(2.15.0),一直使用这个,最近更新好快,最新版是2.16了
深蓝串口调试工具 2019夏季版(2.15.0) 本软件功能强大,支持1M波特率,除了传统同类软件具有的功能外,还具备适用的数据管理功能,能够通过自动或手动的方式将接收到的数据进行保存。软件采用多线程技术,极力避免保存数据时产生丢包的可能。性能稳定可靠。支持数据以文本的方式、CSV(EXCEL)文件的方式、二进制BIN文件的方式保存。 1. 串口参数可调;2. 数据收发;

推荐一款调试工具:深蓝串口调试工具 2019夏季版(2.14.11),一直使用这个,最近更新好快,最新版是2.16了
深蓝串口调试工具2017冬季版(2.14.11) 本软件功能强大,除了传统同类软件具有的功能外,还具备适用的数据管理功能,能够通过自动或手动的方式将接收到的数据进行保存。软件采用多线程技术,极力避免保存数据时产生丢包的可能。性能稳定可靠。支持数据以文本的方式、CSV(EXCEL)文件的方式、二进制BIN文件的方式保存。 1. 串口参数可调; 2. 数据收发; 3. 智能格

深蓝学院视觉SLAM进阶:从零开始手写VIO
课程大纲 第1章:概述与课程介绍第2章:IMU传感器&IMU预积分与视觉信息融合第3章:滑动窗口算法理论与实践第4章:视觉前端第5章: VINS系统构建第6章:课程总结+V:jevnopark 第1章:概述与课程介绍 第1节: 概述与课程介绍 第2章:IMU传感器&IMU预积分与视觉信息融合 第1节: IMU传感器第2节: 基于优化的IMU预积分与视觉信息融合 第
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--作业
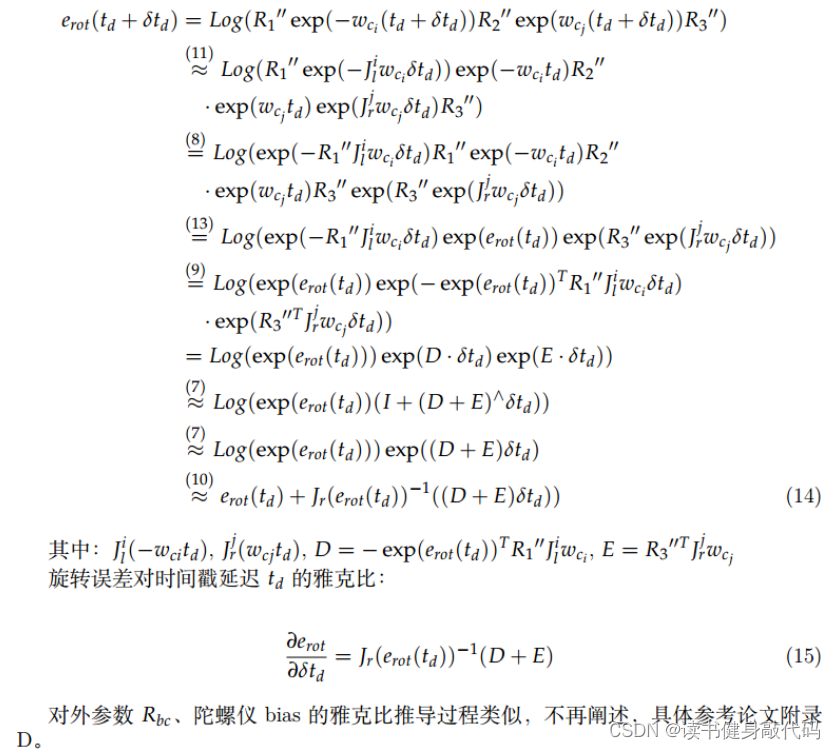
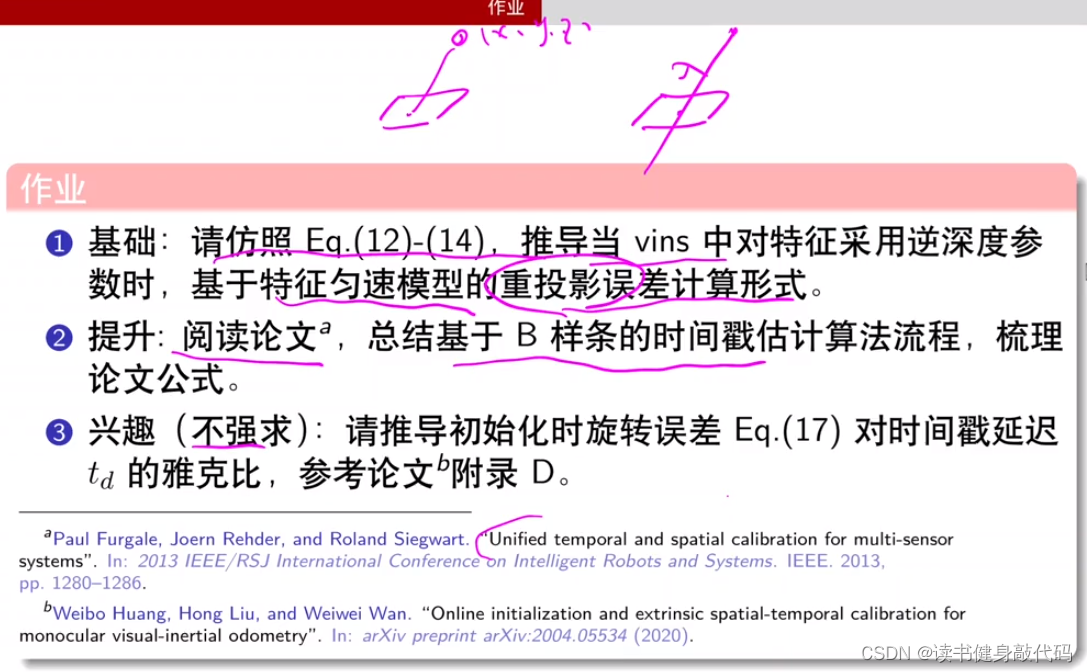
0. 题目 1. T1 逆深度参数化时的特征匀速模型的重投影误差 参考常鑫助教的答案:思路是将i时刻的观测投到world系,再用j时刻pose和外参投到j时刻camera坐标系下,归一化得到预测的二维坐标(这里忽略了camera的内参,逆深度是在camera系下) 要计算的是i时刻和j时刻之间的补偿之后的u坐标的重投影误差,所以i时刻也要补偿,具体步骤见下,式(5)参照14讲P47的公式,
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--作业
0. 题目 1. T1 逆深度参数化时的特征匀速模型的重投影误差 参考常鑫助教的答案:思路是将i时刻的观测投到world系,再用j时刻pose和外参投到j时刻camera坐标系下,归一化得到预测的二维坐标(这里忽略了camera的内参,逆深度是在camera系下) 要计算的是i时刻和j时刻之间的补偿之后的u坐标的重投影误差,所以i时刻也要补偿,具体步骤见下,式(5)参照14讲P47的公式,

深蓝代表的计算机应用领域是,2017年10月自学考试《计算机应用基础》模拟试题...
2017年10月自学考试《计算机应用基础》模拟试题 一、单项选择题(本大题共40小题,每小题1分,共40分)在每小题列出的四个选项中只有一个选项是符合题目要求的,请将正确选项前的字母填在题后的括号内。 1.一个完整的微型计算机系统包括( ) A.主机箱、键盘、显示器和打印机 B.系统软件和应用软件 C.计算机主机及外部设备 D.硬件系统和软件系统 2.既可用作输入设备又可用作输出设备的是( )

21年前这位国际象棋冠军败给AI深蓝 但现在却说AI不会超过人类
▼ 点击上方蓝字 关注网易智能 聚焦AI,读懂下一个大时代! 【网易智能讯3月4日消息】前国际象棋世界冠军Garry Kasparov于1997年被深蓝(Deep Blue )击败之前,曾在国际象棋比赛中击败了32台电脑。 Kasparov自那时起就坚定地支持机器学习,并声称许多批评人士不理解开
【深蓝学院】手写VIO第8章--相机与IMU时间戳同步--笔记
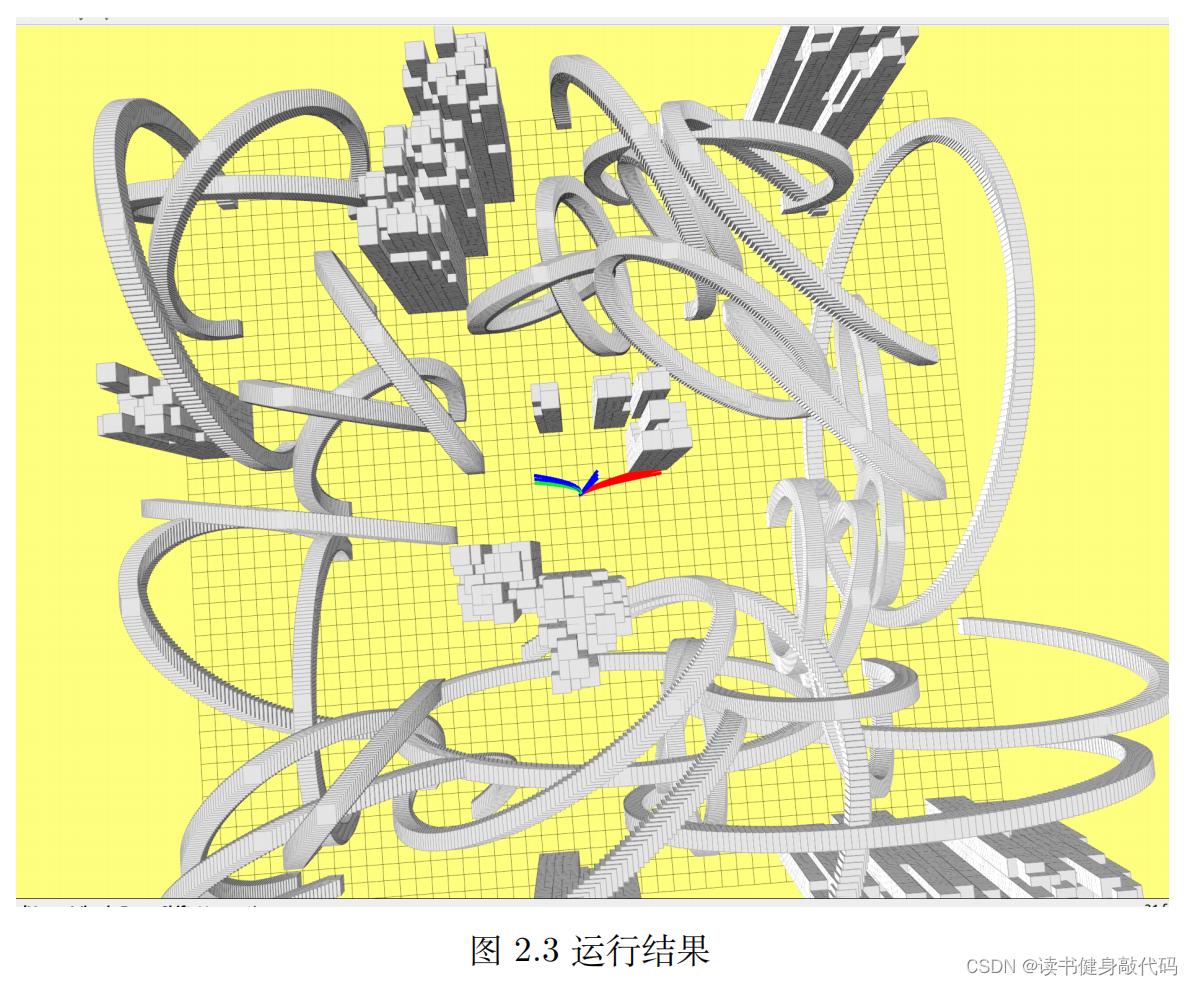
0. 内容 1. 时间戳同步问题及意义 时间戳同步的原因:如果不同步,由于IMU频率高,可能由于时间戳不同步而导致在两帧camera之间的时间内用多了或者用少了IMU的数据,且时间不同步会导致我们首尾camera和IMU数据时间不同,会使估计存在误差,使我们的系统精度下降甚至出现错误的预测。如果以IMU时间为准确的,同步之后,我们可以用时间戳偏移对系统估计的 T w b T_{wb} Tw
深蓝学院-路径规划学习导论
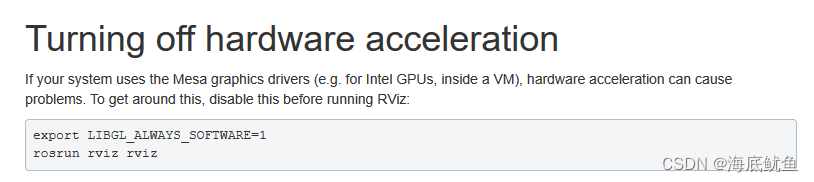
HomeWork 问题解决 环境: ubuntu 20.04 ; ROS版本: noetic; 1、出现PCL报错:#error PCL requires C++14 or above 解决方法: 在grid_path_searcher文件夹下面的CMakeLists.txt文件中补充如下语句: ADD_COMPILE_OPTIONS(-std=c++11 )ADD_COMPILE_O