本文主要是介绍深蓝学院-路径规划学习导论,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
HomeWork 问题解决
环境: ubuntu 20.04 ; ROS版本: noetic;
1、出现PCL报错:#error PCL requires C++14 or above
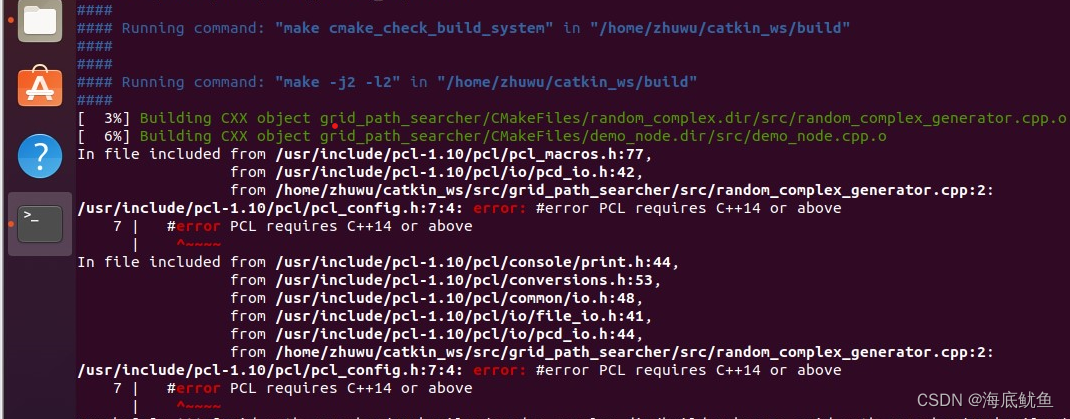
解决方法:
在grid_path_searcher文件夹下面的CMakeLists.txt文件中补充如下语句:
ADD_COMPILE_OPTIONS(-std=c++11 )
ADD_COMPILE_OPTIONS(-std=c++14 )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
如下(放在前面也无妨,并且第三行原本就有,可以找到对应位置添加前两行,大佬们的解释是在这一行之前加制定c++编译版本):

这一错误在一开始编译就会出现,判断是不是c++14编译版本的问题,要看最开始的error(可以在出现第一次报错时候直接crtl+c退出查看)
2、运行rviz后提示错误:PluginlibFactory: The plugin for class ‘rviz_plugins/Goal3DTool’ failed to load.
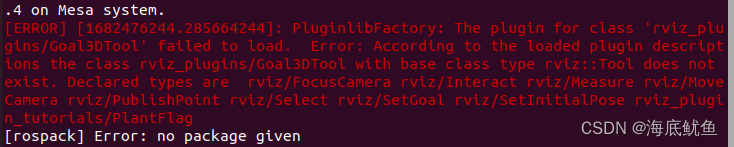
解决方法:
针对‘打开 rviz’这一步骤执行如下操作,
首先,在终端执行命令 roscore
然后,ctrl+shift+t,打开新一页终端,并 cd 到 catkin_ws(建立的工作空间)所在路径下
然后,source devel/setup.bash (目的是环境变量在当前终端中生效)
最后:rviz
3、运行roslaunch grid_path_searcher demo.launch后RViz不显示点云地图并且AllMap下的Message出现错误Failed to transform from frame [/world] to frame [world],如下
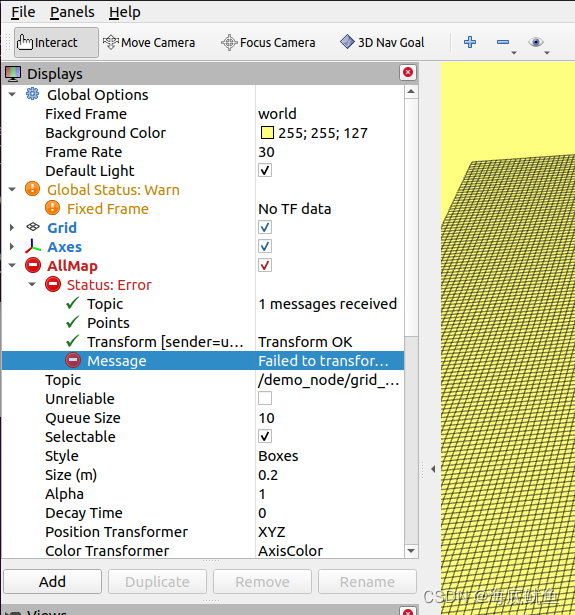
解决方法:
将文件demo.rviz(路径:catkin_ws/src/grid_path_searcher/launch/rviz_config/demo.rviz)中的Fixed Frame中的world改成//world (大佬们的解释:猜测是转义问题,加 // 解决)
之后若再次执行roslaunch grid_path_searcher demo.launch出现界面卡死
解决方法:
出自wiki的rviz介绍 2. Troubleshooting
你需要关闭可能造成问题的硬件加速(如使用了intel gpu, VM),直接复制粘贴这条命令:
export LIBGL_ALWAYS_SOFTWARE=1
重启一下rviz,问题直接得到解决。
补充说明:
rviz 和 roslaunch 之前都需要刷新一下环境变量,不然还是可能会出现一些问题,像还是不能正常显示,加载不了rviz_plungin这些插件,建议都在工作空间的路径下打开rivz,且在打开前要刷新环境变量。
————————————————
版权声明:本文参考CSDN博主「雨聚云出」和「秦鄢」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/Pichai/article/details/123648573
https://blog.csdn.net/weixin_38478542/article/details/126615247
这篇关于深蓝学院-路径规划学习导论的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





