泊车专题

自动驾驶系列—记忆泊车技术:未来驾驶的智能伴侣
🌟🌟 欢迎来到我的技术小筑,一个专为技术探索者打造的交流空间。在这里,我们不仅分享代码的智慧,还探讨技术的深度与广度。无论您是资深开发者还是技术新手,这里都有一片属于您的天空。让我们在知识的海洋中一起航行,共同成长,探索技术的无限可能。 🚀 探索专栏:学步_技术的首页 —— 持续学习,不断进步,让学习成为我们共同的习惯,让总结成为我们前进的动力。 🔍 技术导航: 人工智能:深入探讨人工智

《从0开始搭建实现apollo9.0》系列八 泊车模块解读
《从0开始搭建实现apollo9.0》系列八 泊车模块解读 泊车规划模块位置 modules/planning/scenarios/valet_parking/ 泊车阶段的开始条件: planning command里存在泊车命令距离泊车点距离parking_spot_range_to_start以内 配置文件 pipeline.pb.txt可以看到泊车分为两个阶段,一个是Approac

智能驾驶的关键技术:自主泊车轨迹规划
智能驾驶的关键技术:自主泊车轨迹规划 搭载先进的车载传感器、控制器、执行器等装置,具备复杂环境感知、智能化决策等功能的车辆,我们称之其为智能车。智能车的车载决策规划模块用于生成车辆的行驶行为,直接体现车辆行驶的智慧水准。决策规划模块的一项具体功能是规划行车轨迹,即生成一条能够抵达既定位置姿态、避免碰撞、易被控制器跟踪、舒适自然、高效节能的时空连续曲线。 附赠自动驾驶学习资料和量产经验:链接

基于MPC的自动驾驶泊车控制
基于MPC的自动驾驶泊车控制 H. Ye, H. Jiang, S. Ma, B. Tang, and L. Wahab, “Linear model predictive control of automatic parking path tracking with soft constraints,” International Journal of Advanced Robotic Sys

SUPS:一种用于自动驾驶的仿真地下泊车场景数据集
SUPS:一种用于自动驾驶的仿真地下泊车场景数据集 附赠自动驾驶学习资料和量产经验:链接 摘要 本文介绍了SUPS:一种用于自动驾驶的仿真地下泊车场景数据集。随着自动驾驶的范围扩大,自动地下泊车引起了人们极大的关注。自动驾驶汽车应该获取环境信息、跟踪其位置,并且构建可靠的场景地图。主流解决方案包括经过良好训练的神经网络以及同时定位和见图(SLAM)方法,这些方法需要大量精心标注的图像和多
详细解析记忆泊车的顶层技术原理
详细解析记忆泊车的顶层技术原理 附赠自动驾驶学习资料和量产经验:链接 相对于记忆行车而言,记忆泊车 MPA(Memory Parking Assist)可以看成是停车场区域内的一个自动驾驶功能,可帮助用户按记忆的路线自动巡航并泊入车位或自动从车位泊出并巡航至泊出点。如下图表示了记忆行车和记忆泊车在整个工作环境中的场景示意图。 通常情况下,考虑到记忆泊车实际是一种低速自动驾驶控制过程,
做自动驾驶的“开路先锋”,自主泊车真的准备好了吗?
文 | 魏启扬 来源 | 智能相对论(ID:aixdlun) 在今年的龙湾论坛上,吉利向外界正式发布了“爬行者智能系统”,并宣布利用V2X技术,借助“云端”、“路端”、“停车场端”的辅助设施,能100%实现自主泊车。 几乎在同一时间,百度智能汽车事业部总经理顾维灏在接受媒体采访时,表示百度的自主泊车解决方案现可适用于市面99%以上的的停车位,目前已有Gofun出行、盼达用车、威马汽车、现

java/php/node.js/python停车场泊车引导系统【2024年毕设】
本系统带文档lw万字以上 文末可领取本课题的JAVA源码参考 开发环境 开发语言:Java 框架:ssm 技术:ssm+vue JDK版本:JDK1.8 服务器:tomcat7 数据库:mysql 5.7或8.0 数据库工具:Navicat11 开发软件:eclipse/myeclipse/idea Maven包:Maven3.3.9 浏览器:建议谷歌浏览器或edg
基于物联网的智能辅助泊车系统设计与实现
目 录 摘 要 I Abstract II 引 言 1 1 相关技术 3 1.1 物联网技术 3 1.2 JFinal框架技术 3 1.3 uni-app技术 4 1.4 本章小结 4 2 智能辅助泊车系统的分析 5 2.1 需求分析 5 2. 1.1 系统的功能需求 5 2. 1.2 系统的非功能需求 5 2. 1.3 系统业务需求角色分析 5 2. 1.4 车主需求分析 6 2. 1.5 停

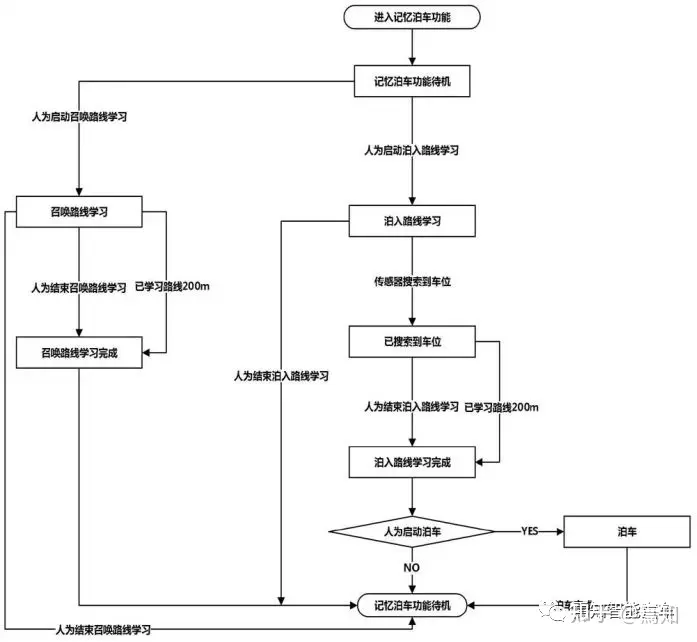
自动驾驶记忆泊车HAVP功能规范
1. 功能描述... 4 1.1 信号需求.... 5 1.1.1 输入信号.... 5 1.1.2 输出信号.... 16 1.2 状态机.... 32 1.2.1 状态描述.... 32 1.2.2 状态迁移条件.... 32 1.3 功能流程.... 34 1.3.1

python机器人编程——基于单目视觉、固定场景下的自动泊车(下)
目录 一、前言二、主要思路step0 设定一个中间位置step1 掉转马头step2 直线匀速前进step3 调整姿态step4 视觉匹配 三、效果四、全篇总结 一、前言 本篇来讨论一下在固定场景下,如何仅通过单目视觉,实现差速小车的自动停靠,这种方式实现成本比较低,可适应的范围比较广,比如可以应用于小车的自动充电桩寻找、工位的最准等应用场景。我们还是尝试应用有限、浅显的数学对固
强化学习自动泊车的问题
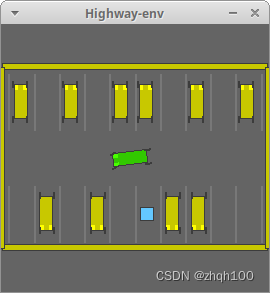
注意:该文章仅用于提出问题,尚没有答案 最近对自动泊车比较感兴趣,想用强化学习来解决自动泊车的问题,然后发现了一个非常优秀的工程,Parking - highway-env Documentation 其github网址是 GitHub - Farama-Foundation/HighwayEnv: A minimalist environment for decision-making
自动驾驶代客泊车AVP决策规划详细设计
背景 随着产品的不断迭代,外部停车场的铺开,PAVP车辆需要应对的场景将越来越复杂,因此整体算法泛化能力的提升显得尤为关键。为了打磨巡航规划的能力,算法架构应当设计的更为灵活,可以针对使用场景迁入更为先进有效的算法,同时也可以更好的结合现有成熟的仿真平台进行算法的离线调优;此外考虑到产品的设计需求以及硬件算力的限制,算法性能的优化也是十分重要的课题。 算法架构图 总体算法架构图

【自动驾驶】泊车系统的拆解和分析
摘要: 在自动辅助驾驶系统系统中,有关多种类传感器和主控系统连接的方法。 在自动辅助驾驶系统系统中,有关多种类传感器和主控系统连接的方法。一份关于保时捷的泊车系统的报告,我觉得很有价值,梳理下和大家进行交流。 这套系统是基于Continental SVC210的环视摄像头,这个环视摄像头带有鱼眼镜头光学模块、使用 Omnivision、CMOS 图像传感器、1.3 MP的图像传感器,数据通过

自动泊车の停车位检测
APA 自动泊车相关的车位检测算法。 一、背景介绍 自动泊车大体可分为4个等级: 第1级,APA 自动泊车:驾驶员在车内,随时准备制动,分为雷达感知和雷达+视觉感知两种方式。 第2级,RPA 远程泊车:驾驶员在车外,通过手机APP的方式控制泊车。 第3级,HPA 记忆泊车:泊车之前先通过 SLAM对场景建模,记忆常用的路线。泊车时,从固定的起点出发,车辆自行泊入记忆的停车位。 第4级,
基于物联网的智能辅助泊车系统设计与实现
目 录 摘 要 I Abstract II 引 言 1 1 相关技术 3 1.1 物联网技术 3 1.2 JFinal框架技术 3 1.3 uni-app技术 4 1.4 本章小结 4 2 智能辅助泊车系统的分析 5 2.1 需求分析 5 2. 1.1 系统的功能需求 5 2. 1.2 系统的非功能需求 5 2. 1.3 系统业务需求角色分析 5 2. 1.4 车主需求分析 6 2. 1.5 停

记忆泊车信息安全技术要求
一.概述 1.1 编写目的 记忆泊车过程涉及车辆通信、远程控制车辆等关键操作,因此需要把信息安全考虑进去,确保整个自动泊车过程的信息安全。 1.2 编写说明 此版为信息安全需求,供应商需要整体的信息安全方案。 1.3 适用范围 关于适用范围。本文档针对记忆泊车架构和实现的功能提出相关安全需求,如遇到架构调整、关键功能点变更,相关安全需求也要进行调整更新。 1.4 规范性引用 下列
自动驾驶代客泊车360环式系统及倒车雷达功能规范
1. 文档总概. 8 1.1. 范围. 8 1.2. 名词解释. 8 1.3. 相关应用文档. 8 1.3.1. 文档优先说明. 8 1.3.2. 政府法规与文件. 9 1.3.3. 行业规范与文件. 9 1.3.4. 百度及客户提供相关功能定义文档. 9 2. 系统概述. 10 2.1.
自动驾驶代客泊车AVP安全监控设计
目 录 安全监控设计... I 文档... I 1 文档... 1 1.1 变更历史 1 1.2 术语 1 1.3 引用文档 1 2 功能综述... 2 3 详细方案... 4 3.1 FPGA供电PMIC的监控 4 3.2 camera接口电路的监控 5 3.3 上电时序监控 6 3.4 供电电压监控 7 3.5 温度的监控 8 3.6 IMU内
基于云平台技术的自动泊车浅谈
基于云平台技术的自动泊车浅谈 一、引言 自动泊车技术是当前汽车技术的重要发展方向之一,它能够帮助驾驶员自动完成泊车操作,提高驾驶安全性。基于云平台技术的自动泊车创新,将为自动泊车技术的发展带来新的突破。 二、云平台技术概述 云平台技术是一种基于云计算的分布式计算技术,可以将计算资源(如服务器、存储设备和网络)虚拟化为云,并通过互联网提供给用户使用。通过云平台技术,用户可以随时随地访问数据和
自动驾驶学习笔记(二十二)——自动泊车算法
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo开放平台9.0专项技术公开课》免费报名—>传送门 文章目录 前言 感知算法 定位算法 规划算法 控制算法 算法调试 总结 前言 见《自动驾驶学习笔记(十七)——视觉感知》 见《自动驾
代客泊车的环视图鱼眼BEV感知的数据集、基线方法和克服畸变的多任务框架
点云PCL免费知识星球,点云论文速读。 文章:Surround-view Fisheye BEV-Perception for Valet Parking: Dataset, Baseline and Distortion insensitive Multi-task Framework 作者:Zizhang Wu1& Yuanzhu Gan1& Xianzhi Li2∗ Yunzhe Wu1

AVP自主代客泊车规划算法学习
AVP泊车规划算法学习 一、满足运动学的rrt算法 输入:起始点和终止点车辆状态【x,y,朝向,线速度】 输出:从起始点到目标点的路径【车辆状态序列:位置,朝向,速度,角速度等】 原理: rrt最多进行70000个节点。首先在rrt上随机采样一个节点。然后针对该节点采用满足动力学的rrt进行新节点生成。当新节点和目标节点的距离小于阈值时,规划结束,路径回溯。找到最终规划的路径【为车辆的状态:位
泊车功能专题介绍 ———— AVP系统定义应用场景
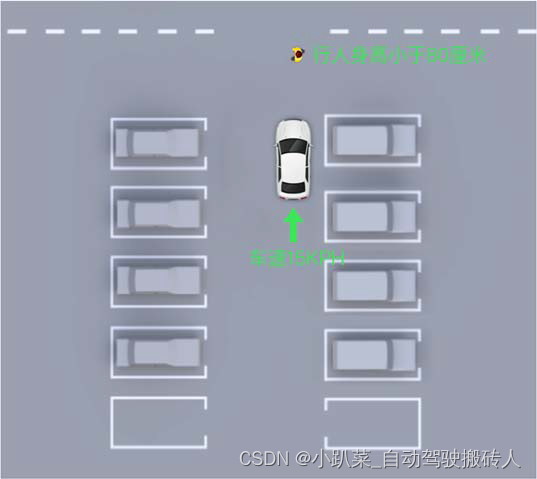
文章目录 介绍术语 系统定义系统架构系统类型 应用场景安全场景简介安全场景定义介绍安全场景外部环境 安全场景定义开启场景结束场景车位被占用搜索车位无空闲车位路口/出入口/跨层通道减速障碍物阻挡发生碰撞车辆离线光线变化天气变化环境变化常见障碍物类型 行人安全场景车辆向前直行,前方出现行人车辆向前直行,侧向行人靠近车辆向后直行,后方出现行人车辆向后直行,侧向行人靠近车辆向前转弯,转弯路径上出现行
自动驾驶算法分享与实现:代客泊车AVP算法的框架与代码实现
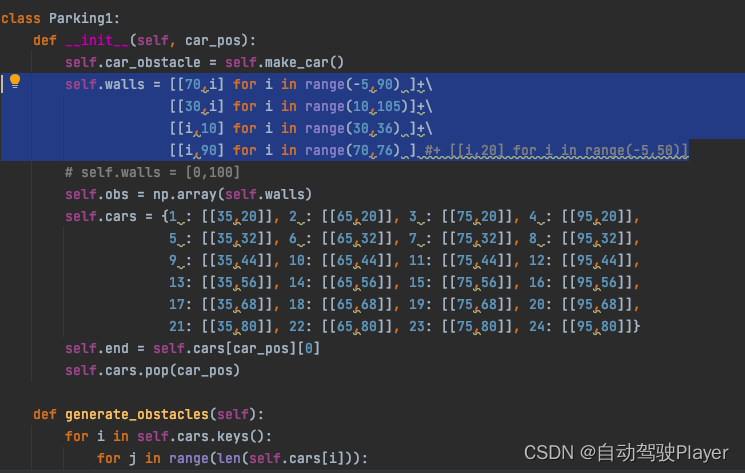
本文将介绍一个使用Python实现的代课泊车AVP算法,包括AVP算法中基于Astar的全局导航路径生成算法、自动泊车AP轨迹生成算法、基于MPC的横纵向控制算法;同时本文也将介绍该Demo的环境配置与调试方法。 本文提到的Demo需要订阅专栏后私信博主获得。 一、环境配置 需要使用python3.6,并且安装以下依赖包: # pip install -r requirement