本文主要是介绍泊车功能专题介绍 ———— AVP系统定义应用场景,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 介绍
- 术语
- 系统定义
- 系统架构
- 系统类型
- 应用场景
- 安全场景简介
- 安全场景定义介绍
- 安全场景外部环境
- 安全场景定义
- 开启场景
- 结束场景
- 车位被占用
- 搜索车位无空闲车位
- 路口/出入口/跨层通道减速
- 障碍物阻挡
- 发生碰撞
- 车辆离线
- 光线变化
- 天气变化
- 环境变化
- 常见障碍物类型
- 行人安全场景
- 车辆向前直行,前方出现行人
- 车辆向前直行,侧向行人靠近
- 车辆向后直行,后方出现行人
- 车辆向后直行,侧向行人靠近
- 车辆向前转弯,转弯路径上出现行人
- 车辆向前转弯,侧向行人靠近
- 车辆向后转弯,转弯路径上出现行人
- 车辆向后转弯,侧向行人靠近
- 车辆前向下坡直行,前方出现行人
- 车辆前向下坡直行,侧向行人靠近
- 车辆向前上坡直行,前方出现行人
- 车辆向前上坡直行,侧向行人靠近
- 车辆向前下坡转弯,转弯半径上出现行人
- 车辆向前下坡转弯,侧向行人靠近
- 车辆向前上坡转弯,转弯半径出现行人
- 车辆向前上坡转弯,侧向行人靠近
- 行人安全特殊极端场景
- 行人从遮挡物后快速冲出(鬼探头)/遮挡物后出现静止障碍物场景
- 行人横躺在行车路径
- 身高小于80cm 的行人
介绍
术语
1. AVP —— 自主代客泊车(Automated Valet Parking)
2. AVP专用标识 —— 在AVP产品中,认为布置在停车场内外的具有一定规则,用于辅助车辆定位的标识。
3. 响应延迟时间 —— CAN总线发出目标指令到对应设备开始执行的时间。
4. 执行时间 —— 设备开始执行目标指令到反馈信号参数第一次达到目标参数所持续的时间
5. 最大超调量 —— 设备在执行指令的过程中,实际反馈信号参数超过目标参数的最大误差值。
6. 超调时间 —— 设备在执行指令的过程中,反馈信号参数第一次到达目标参数的时刻至反馈信号第一次的时间。
7. SOTIF —— Safety of the Intended Funcationality。由于预期功能不足而造成的危险或由于合理预见的人员滥用而造成的不合理风险的不存在,被称为预期功能的安全性(SOTIF) ——ISO21448。
8. V2X —— 车用无线通讯技术(Vehicle to Everything)
9. V2V —— 车与车之间的交互通讯(Vehicle to Vehicle)
10. V2I —— 车与路之间交互通讯(Vehicle to Infrastructure)
11. ODD —— 设计运行区域(Operational Design Domain)
系统定义
自主代客泊车系统(Automated Valet Parking,以下简称 AVP)定义:用户在指定下客点下车,通过手机 APP下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵与监控;用户通过手机 APP下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点;若多辆车同时收到泊车指令,可实现多车动态的自动等待进入泊车位。车辆自动行驶过程中应能遵守道路交通规则,或停车场运营方所制定的场内交通规则。
系统架构
AVP系统架构概要图。本系统架构图旨在为阅读理解本文件提供参考,不做强制性要求,各系统设计供应商可以根据各自技术优势设计各自系统的架构。
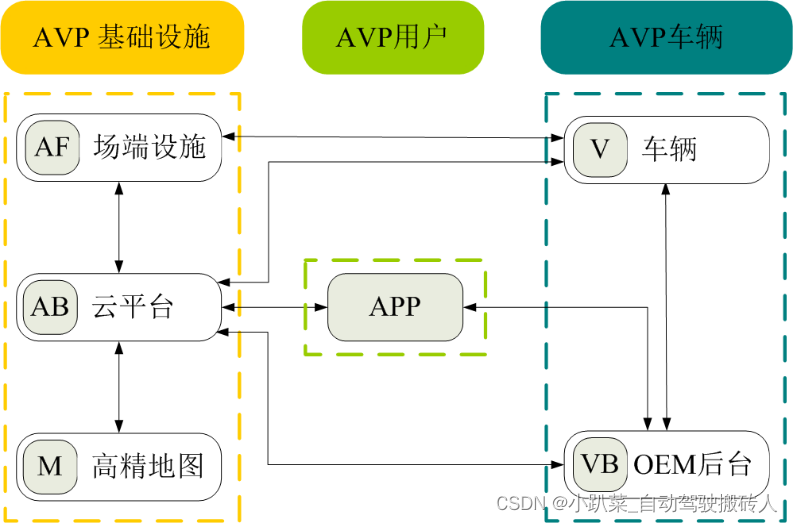
系统类型
AVP系统典型架构中各个子系统所承担的功能可按照下表进行分配:
| AVP系统功能分配 | |
|---|---|
| 子系统名称 | 主要功能 |
| 用户前端(APP) | 1. 发送预约/取车请求 2. 接收/通知车辆状态 |
| 场端设施(AF) | 1. 检查ODD状态 2. 自动驾驶过程中的紧急/故障工况处理 3. 场端感知及判断 |
| 云平台(AB) | 1. 停车位状态监控 2. 预约停车位 3. 车位分配 4. 全局路径规划 |
| 地图(M) | 1. 地图管理 |
| 车辆(V) | 1. 车端感知及判断 2. 车辆定位 3. 局部路径规划 4. 车辆运动控制 |
| 车辆后端(VB) | 1. 车辆远程唤醒和启动 |
根据AVP系统功能分配的不同,国内AVP系统分类如表所示:Type1为车端智能子系统,Type2为场端智能子系统,Type3为车和场相互协同子系统。
| AVP系统分类 | |||
|---|---|---|---|
| 功能 | Type1 | Type2 | Type3 |
| 车位分配 | V/AB | AB/AF | AB |
| 全局路径规划 | V | AB/AF | AB |
| 感知判断 | V | AF | V&AF |
| 定位 | V | AF | V&AF |
| 局部路径规划 | V | AF | V |
| 车辆运动控制 | V | V | V |
应用场景
安全场景简介
安全场景定义介绍
AVP场景定义,定义了AVP自主泊车系统运行时,常见的应用场景,常见的安全相关的场景。这些场景的定义帮助AVP自主泊车系统测试适用性,安全性。AVP量产项目通过这些场景的测试,提升AVP在使用时的体验,减少或避免AVP在运行时对人身安全造成的伤害。
安全场景外部环境
AVP自主泊车系统运行,会受到光照、天气、路面环境等外因影响,在测试时,根据车辆使用场景在不同的环境中进行多次测试。典型的外部环境因素如表所示。
| AVP安全场景外部环境因素 | ||
|---|---|---|
| 光照 | 天气 | 路面材质 |
| <30lux | 雨 | 水泥/混凝土 |
| 30~50lux | 雪 | 砖石、鹅卵石 |
| 50~100lux | 雾 | 环氧地坪 |
| 100~3000lux | 气温0℃以下 | 沥青路面 |
| 3000~100000lux | - | - |
安全场景定义
开启场景
用户驾车进入AVP停车场,完成高精定位。如果停车场设定了下车点,用户应在下车点开启AVP。如果停车场设定了接驾点,用户使用接驾功能时,只能选择指定的接驾点。如果停车场未设定任何下车点、接驾点,用户可以在任意地点开启AVP功能。
开启AVP功能前,应判断开启条件,下方提供的条件仅为基础条件,OEM可根据需求自行设计,但应包括如下条件:
1. 车辆档位处于P档;
2. 车辆EPB状态处于挂起;
3. 车辆四门两盖及天窗处于关闭状态。
AVP功能开启后,应自动落锁。
结束场景
AVP泊入任务完成后,车辆应主动上报用户泊入车位信息,并完成驻车熄火,进入休眠模式。
AVP取车任务完成后,车辆应上报用户车辆位置信息,并保持驻车状态。
车位被占用
用户使用AVP指定车位泊车功能是,车辆自动驾驶前往指定车位,到达指定车位后发现车位被占用。此时,车辆应主动通知客户,并展示车位被占用信息提示。提供选择让用户更换车位等其他替代方案处理。此处的设计应存在超时设计,否则会影响到停车场交通。如果用户出现超时未处理,车辆应自行决策另行泊车或者靠边停车等处理策略。
搜索车位无空闲车位
用户使用AVP搜索车位功能是,如果车辆完成整个停车场行驶未找到车位(可设置行驶时间或者行驶圈数作为上报条件),车辆应通知用户,并展示未找到车位的信息提示。用户可选择继续寻找等其他处理方式。用户如超时微处理,车辆应自行决策泊车或者靠边泊车,不能影响停车场的交通运行。如果是场端支持的停车场,可由场端运营人员协助处理。
路口/出入口/跨层通道减速
车辆执行AVP功能时,应在路口、停车场出入口、跨层通道出入口、跨层通道中减速行驶,避免发生碰撞。
障碍物阻挡
车辆激活AVP功能时,如果遇到障碍物阻挡而无法通行时,车辆在等待超时后,应通知用户或场端人员前往处理。
发生碰撞
如果车辆在激活AVP功能后发生碰撞,车辆应紧急制动,并记录碰撞前后的环境数据及车辆自身传感器数据。车辆应通知用户或停车场人员前往处理。
车辆离线
在AVP功能激活后如果出现离线情况(可根据与服务端连接超时时间判断),车辆应靠边停车,避免影响停车场交通。
光线变化
在AVP功能激活后如果出现环境光线低于或高于AVP功能运行的阈值,车辆应紧急制动并终止功能,需要通知用户前往车辆位置进行处理。
天气变化
在AVP功能激活后如果出现天气恶劣变化(雨、雪、雾、霾等),对AVP功能的性能(定位、避障、刹车距离等),车辆应紧急制动,终止AVP功能,并通知用户前往车辆位置进行处理。
环境变化
在AVP功能激活后如果出现环境变化(季节变化、场端改造等),对AVP功能的定位或其他功能受限,车辆应紧急制动,终止AVP功能,并通知用户前往车辆位置进行处理。
常见障碍物类型
| AVP安全场景停车场常见障碍物类型 | ||
|---|---|---|
| 行人 | 车辆 | 静止障碍物 |
| <50cm | 两轮车 | 锥桶 |
| 50cm~80cm | 三轮车 | 禁行牌 |
| >80cm | 两厢/三厢桥车 | 购物推车 |
| 遮盖比例<30% | 越野车 | 地锁 |
| 遮盖比例30% ~ 70% | 小型货车 | 未知障碍物((未知障碍物体积大 于0.5m³、x、y、z三轴每侧端点 不小于0.5m)) |
| 遮盖比例>70% | 梯子 | |
| 俯身于地面夹角<30° | 婴儿车 | |
| 俯身于地面夹角>30° | 婴儿座椅 | |
| 下蹲姿态 | ||
| 滑板/平衡车 | ||
行人安全场景
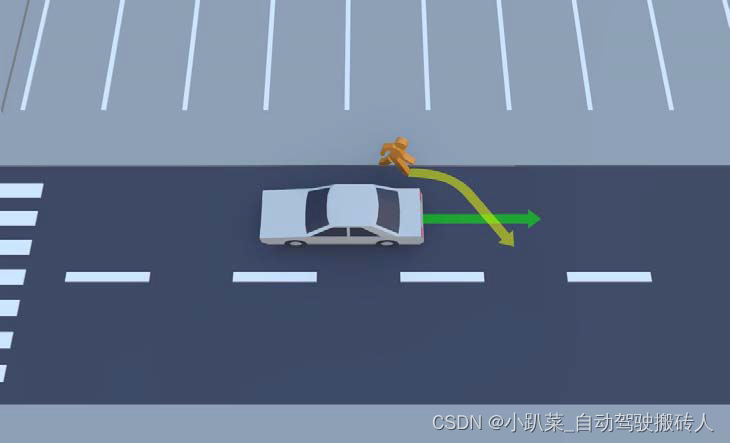
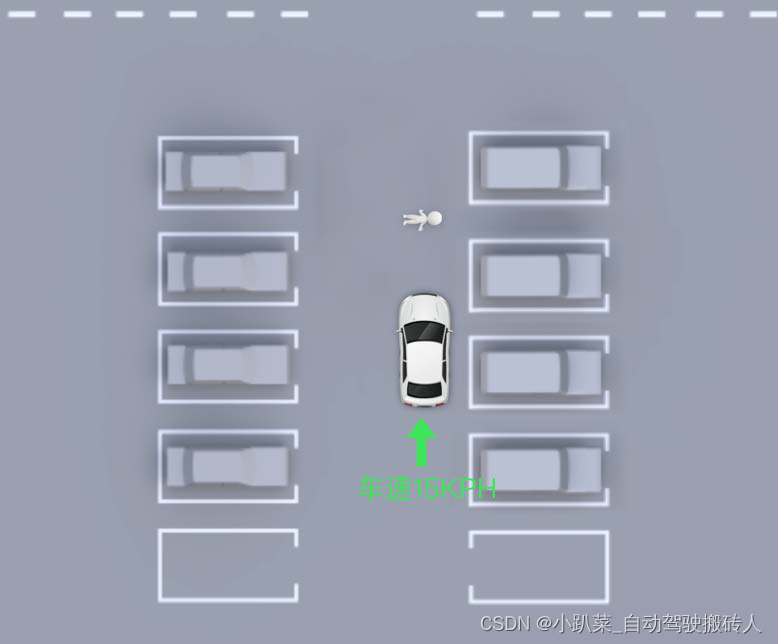
车辆向前直行,前方出现行人

场景定义如下:
1. AVP 车辆向前行驶中,车速10~15 km/h,行人位于车辆行驶路径内(或运动方向与车辆行驶轨迹重合),与车头距离小于5m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车头与行人距离应大于0.5m。
车辆向前直行,侧向行人靠近

场景定义如下:
1. AVP 车辆向前行驶中,车速10~15 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
车辆向后直行,后方出现行人

场景定义如下。
1. AVP 车辆向后行驶中,车速<5 km/h,行人位于车辆行驶路径内(或运动方向与车辆行驶轨迹重合),距离车尾小于2m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车尾与行人距离应大于0.5m
车辆向后直行,侧向行人靠近
场景定义如下:
1. AVP 车辆向后行驶中,车速<5 km/h 行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
车辆向前转弯,转弯路径上出现行人

场景定义如下:
1. AVP 车辆向前行驶转弯(左转/右转),车速<5 km/h 行人位于车辆转弯路径内(或运动方向与车辆转弯路径重合),距离车头小于2m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车头与行人应大于0.5m。
车辆向前转弯,侧向行人靠近

场景定义如下:
1. AVP 车辆向前行驶转弯(左转/右转),车速<5 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
车辆向后转弯,转弯路径上出现行人

场景定义如下:
1. AVP 车辆向后行驶转弯(左转/右转),车速<5 km/h,行人位于车辆转弯路径内(或运动方向与车辆转弯路径重合),距离车尾小于2m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车尾与行人应大于0.5m。
车辆向后转弯,侧向行人靠近

场景定义如下:
1. AVP 车辆向后行驶转弯(左转/右转),车速<5 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
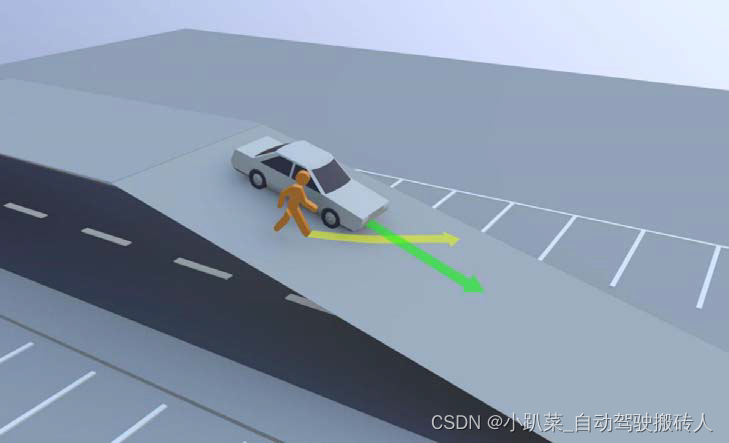
车辆前向下坡直行,前方出现行人
场景定义如下:
1. AVP 车辆向前下坡行驶中,车速5~10 km/h,行人位于车辆行驶路径内(或运动方向与车辆行驶轨迹重合),距离车头小于3m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车头与行人距离应大于0.5m。
车辆前向下坡直行,侧向行人靠近
场景定义如下:
1. AVP 车辆向前下坡直行,车速5~10 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
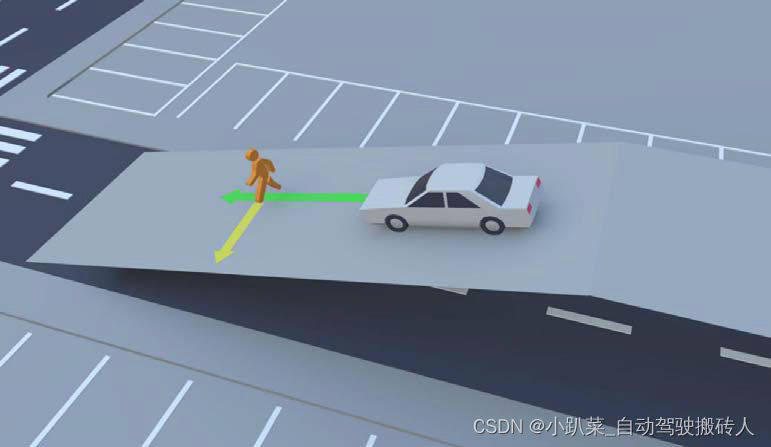
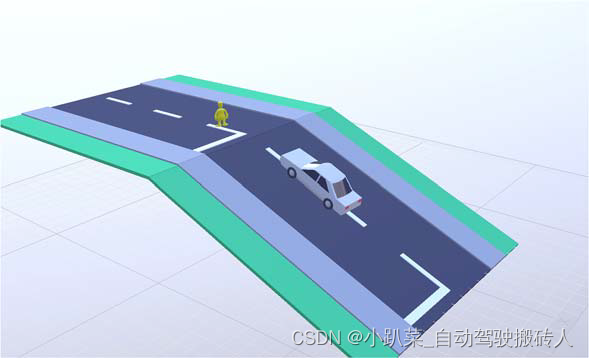
车辆向前上坡直行,前方出现行人

场景定义如下:
1. AVP 车辆向前上坡行驶中,车速5~10 km/h,行人位于车辆行驶路径内(或运动方向与车辆行驶轨迹重合),距离车头小于3m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车头与行人距离应大于0.5m。
车辆向前上坡直行,侧向行人靠近

场景定义如下:
1. AVP 车辆向前上坡行驶中,车速5~10 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
车辆向前下坡转弯,转弯半径上出现行人
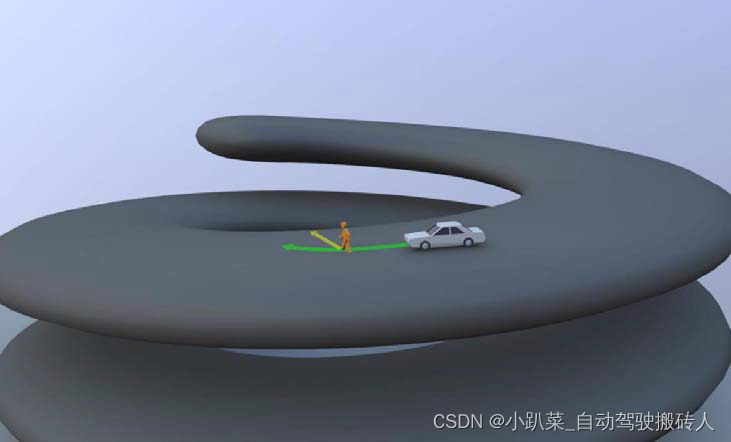
场景定义如下:
1. AVP 车辆向前下坡行驶转弯,车速<5 km/h,行人位于车辆转弯路径内(或运动方向与车辆转弯轨迹重合),距离车头小于2m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车头与行人距离应大于0.5m;
车辆向前下坡转弯,侧向行人靠近

场景定义如下:
1. AVP 车辆向前下坡行驶转弯,车速<5 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
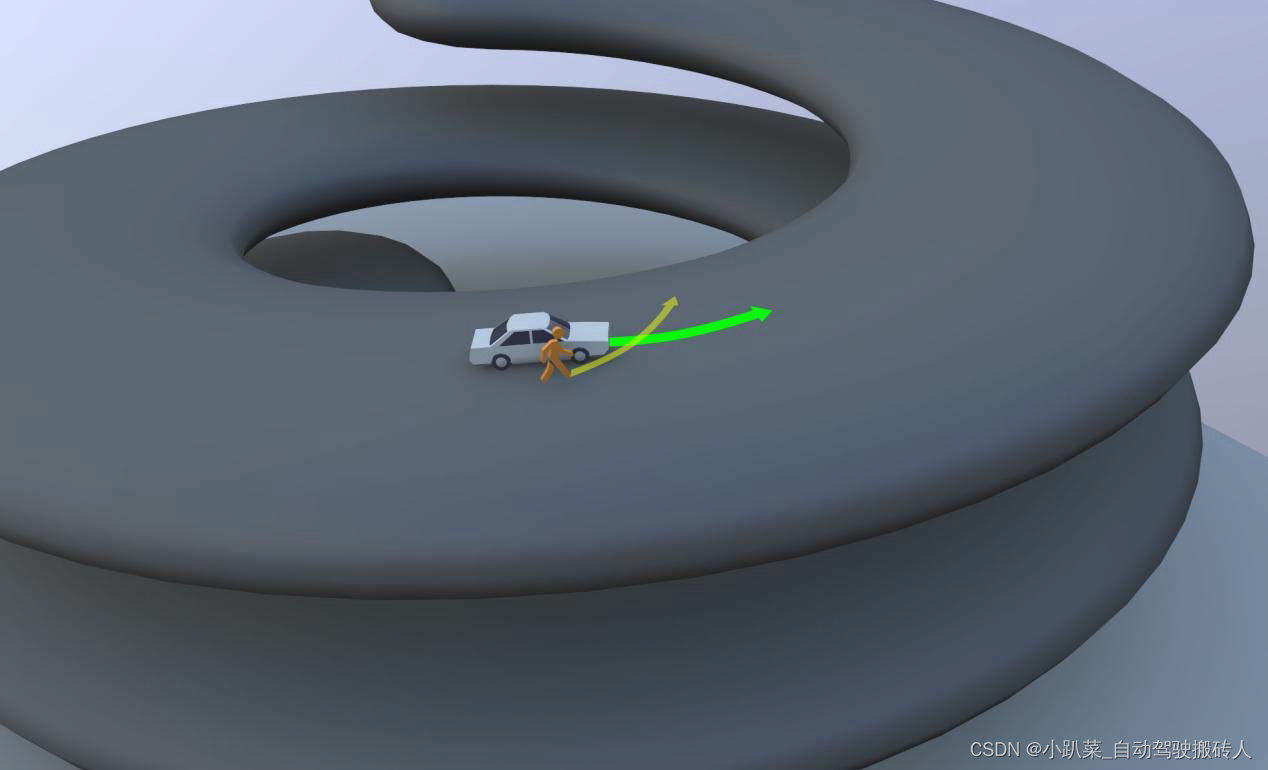
车辆向前上坡转弯,转弯半径出现行人

场景定义如下:
1. AVP 车辆向前上坡行驶转弯,车速<5 km/h,行人位于车辆转弯路径内(或运动方向与车辆转弯轨迹重合),距离车头小于2m;
2. AVP 车辆应作出减速/刹车动作;
3. AVP 车辆应在与行人发生碰撞前刹停;
4. AVP 车辆刹停后车头与行人距离应大于0.5m。
车辆向前上坡转弯,侧向行人靠近
场景定义如下:
1. AVP 车辆向前上坡行驶转弯,车速<5 km/h,行人位于车辆侧向;
2. 当行人与车辆侧面距离小于1m 时,AVP 车辆应减速至3kph 以下;
3. 当行人与车辆侧面距离小于0.5m 时,AVP 车辆应作出刹车动作;
4. AVP 车辆应在与行人发生碰撞前刹停。
行人安全特殊极端场景
行人从遮挡物后快速冲出(鬼探头)/遮挡物后出现静止障碍物场景

场景定义如下:
1. AVP 在运行中,会出现特殊的极端场景,比如鬼探头;
2. AVP 车辆应当避免与行人发生碰撞;
3. 如方案限制无法避免与行人发生碰撞,应尽量减少对行人造成的伤害;
4. AVP 车辆应有数据记录(传感器及车辆指令数据)为责任划分提供证据。
场景定义如下:
1. 在上坡道路尽头有静止的行人;
2. AVP 车辆应当避免与行人发生碰撞;
3. 如方案限制无法避免与行人发生碰撞,应尽量减少对行人造成的伤害;
4. AVP 车辆应有数据记录(传感器及车辆指令数据)为责任划分提供证据。
行人横躺在行车路径
场景定义如下:
1. AVP 运行中,行驶路径上出现躺下的行人;
2. 根据行人的体积、衣着、和环境光线不同,AVP 车辆和场端传感器会有可能无法探测到行人;
3. AVP 车辆如无法避免与行人发生碰撞时,应避免碾压行人,并尽量减少对行人造成的伤害;
4. AVP 车辆应有数据记录(传感器及车辆指令数据)为责任划分提供证据。
身高小于80cm 的行人
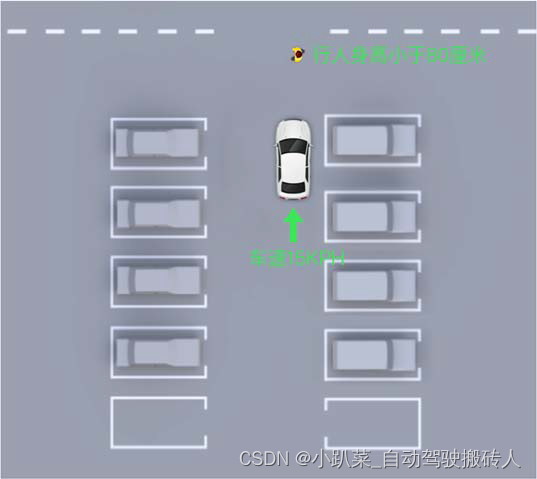
场景定义如下:
1. AVP 运行中,行驶路径上出现身高小于80cm 的行人;
2. 由于环境光线不同,AVP 车辆传感器和厂端传感器会有可能无法探测到行人;
3. AVP 车辆如方案限制无法避免与行人发生碰撞时,应避免碾压行人,并尽量减少对行人造成的伤害;
4. AVP 车辆需要有数据记录(传感器及车辆指令数据)为责任划分提供证据。
这篇关于泊车功能专题介绍 ———— AVP系统定义应用场景的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






