avp专题
自动驾驶代客泊车AVP决策规划详细设计
背景 随着产品的不断迭代,外部停车场的铺开,PAVP车辆需要应对的场景将越来越复杂,因此整体算法泛化能力的提升显得尤为关键。为了打磨巡航规划的能力,算法架构应当设计的更为灵活,可以针对使用场景迁入更为先进有效的算法,同时也可以更好的结合现有成熟的仿真平台进行算法的离线调优;此外考虑到产品的设计需求以及硬件算力的限制,算法性能的优化也是十分重要的课题。 算法架构图 总体算法架构图

自动驾驶代客泊车AVP安全监控设计
目 录 安全监控设计... I 文档... I 1 文档... 1 1.1 变更历史 1 1.2 术语 1 1.3 引用文档 1 2 功能综述... 2 3 详细方案... 4 3.1 FPGA供电PMIC的监控 4 3.2 camera接口电路的监控 5 3.3 上电时序监控 6 3.4 供电电压监控 7 3.5 温度的监控 8 3.6 IMU内
AVP对纵向控制ESP(Ibooster)的需求规范
目录 1. 版本记录... 3 2. 文档范围和控制... 4 2.1 目的/范围... 4 2.2 文档冲突... 4 2.3 文档授权... 4 2.4 文档更改控制... 4 3. 功能概述... 5 4. 系统架构... 6 5. 主要安全目标...

AVP自主代客泊车规划算法学习
AVP泊车规划算法学习 一、满足运动学的rrt算法 输入:起始点和终止点车辆状态【x,y,朝向,线速度】 输出:从起始点到目标点的路径【车辆状态序列:位置,朝向,速度,角速度等】 原理: rrt最多进行70000个节点。首先在rrt上随机采样一个节点。然后针对该节点采用满足动力学的rrt进行新节点生成。当新节点和目标节点的距离小于阈值时,规划结束,路径回溯。找到最终规划的路径【为车辆的状态:位
泊车功能专题介绍 ———— AVP系统定义应用场景
文章目录 介绍术语 系统定义系统架构系统类型 应用场景安全场景简介安全场景定义介绍安全场景外部环境 安全场景定义开启场景结束场景车位被占用搜索车位无空闲车位路口/出入口/跨层通道减速障碍物阻挡发生碰撞车辆离线光线变化天气变化环境变化常见障碍物类型 行人安全场景车辆向前直行,前方出现行人车辆向前直行,侧向行人靠近车辆向后直行,后方出现行人车辆向后直行,侧向行人靠近车辆向前转弯,转弯路径上出现行
自动驾驶算法分享与实现:代客泊车AVP算法的框架与代码实现
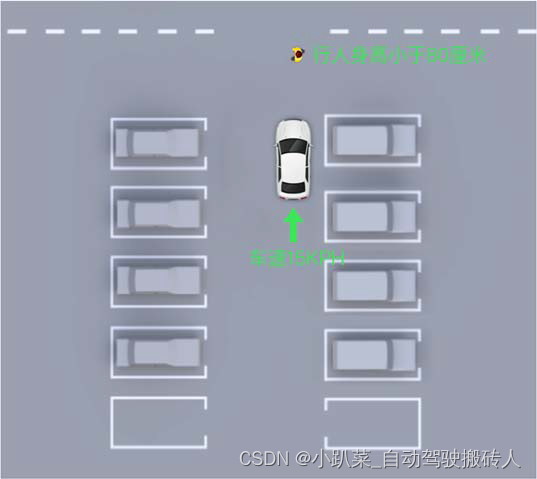
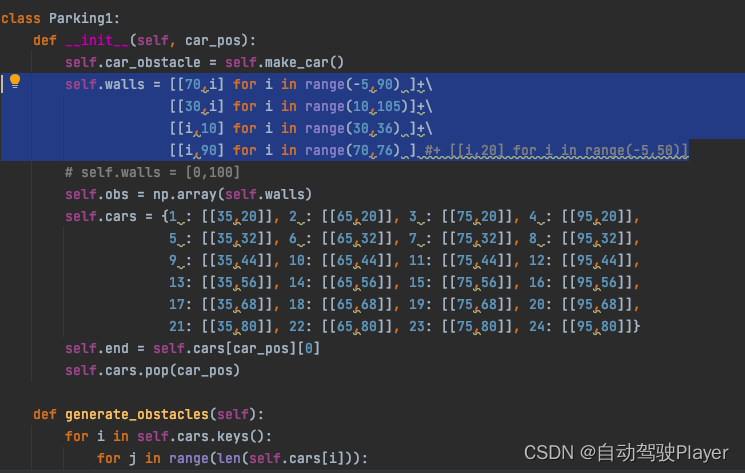
本文将介绍一个使用Python实现的代课泊车AVP算法,包括AVP算法中基于Astar的全局导航路径生成算法、自动泊车AP轨迹生成算法、基于MPC的横纵向控制算法;同时本文也将介绍该Demo的环境配置与调试方法。 本文提到的Demo需要订阅专栏后私信博主获得。 一、环境配置 需要使用python3.6,并且安装以下依赖包: # pip install -r requirement

泊车功能专题介绍 ———— AVP系统技术要求之场地规范定位要求
文章目录 停车场场地规范场地分级规范场地标识规范位置标识跨层标识十字路口标识丁字路口处标识闸口/收费口标识上下车点标识 定位功能要求环境要求定位精度要求场端定位要求道路自动驾驶定位要求泊车入位定位要求 车端定位要求道路自动驾驶定位要求泊车入位定位要求初始定位要求 车场融合定位要求道路自动驾驶定位要求泊车入位定位要求初始定位要求 场端辅助定位定位功能失效失效场景失效类型失效处理
浪起微澜——第五次AVP标准讨论会在驭势上海召开!
4月19日,由中国通信工业协会(CCIA)智能网联专委会主办的AVP自主代客泊车技术标准第五次讨论会在驭势科技上海公司召开,本次会议审核了即将对外发布的AVP技术标准征求意见稿。 5月,AVP标准工作组将继续“征求意见稿”最终稿的审核工作。届时,“征求意见稿”将由CCIA智能网联专委会与中国汽车工程学会联合发布。 去年11月,驭势科技携手上汽通用五菱交付业内首款L4级无人驾驶-智能泊车产品的