本文主要是介绍自动驾驶算法分享与实现:代客泊车AVP算法的框架与代码实现,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
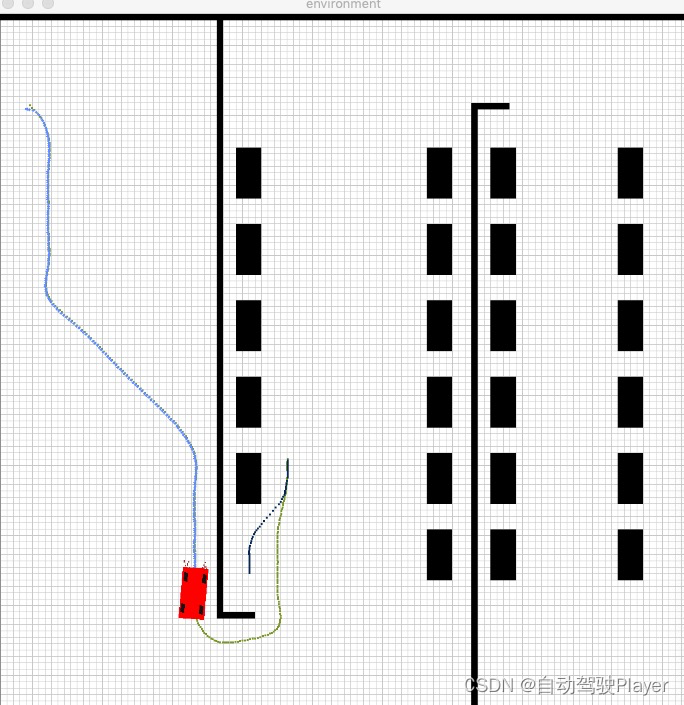
本文将介绍一个使用Python实现的代课泊车AVP算法,包括AVP算法中基于Astar的全局导航路径生成算法、自动泊车AP轨迹生成算法、基于MPC的横纵向控制算法;同时本文也将介绍该Demo的环境配置与调试方法。
本文提到的Demo需要订阅专栏后私信博主获得。
一、环境配置
需要使用python3.6,并且安装以下依赖包:
# pip install -r requirements.txt# base ----------------------------------------numpyopencv-pythonpython-mathscipytimesmatplotlibopencv-python 使用pip不好安装,建议使用conda环境安装以上依赖包。
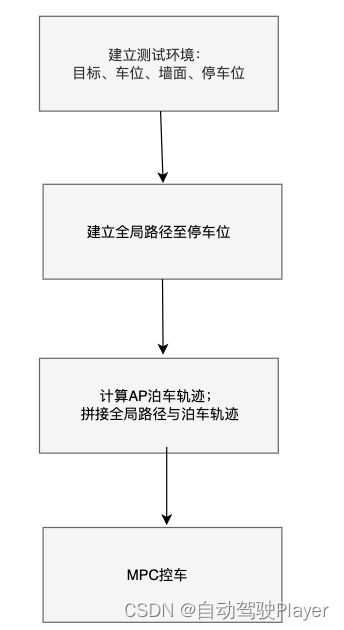
二、算法流程图
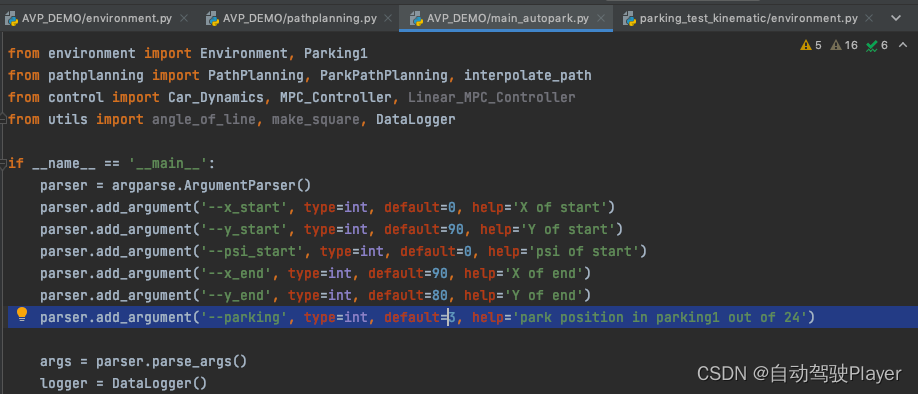
三、调试方法
1、更改停车位,共1~24个车位供选择,main_autopark.py
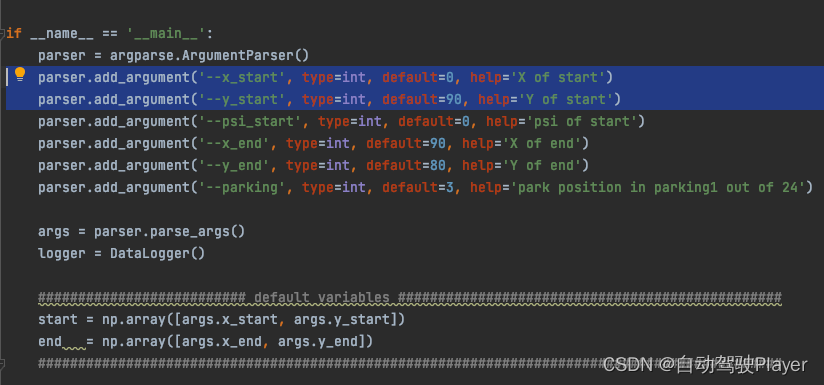
2、更改起点,main_autopark.py
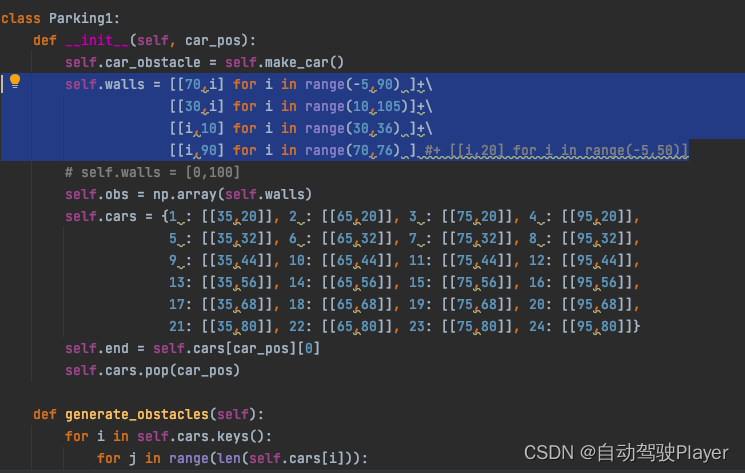
 3、调整障碍物坐标:
3、调整障碍物坐标:
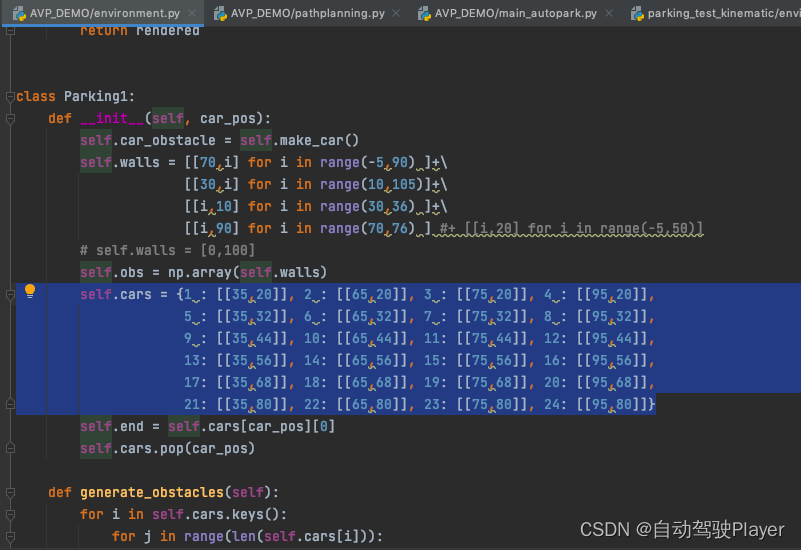
4、调整墙的坐标
这篇关于自动驾驶算法分享与实现:代客泊车AVP算法的框架与代码实现的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






