本文主要是介绍泊车功能专题介绍 ———— AVP系统技术要求之场地规范定位要求,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 停车场场地规范
- 场地分级规范
- 场地标识规范
- 位置标识
- 跨层标识
- 十字路口标识
- 丁字路口处标识
- 闸口/收费口标识
- 上下车点标识
- 定位功能要求
- 环境要求
- 定位精度要求
- 场端定位要求
- 道路自动驾驶定位要求
- 泊车入位定位要求
- 车端定位要求
- 道路自动驾驶定位要求
- 泊车入位定位要求
- 初始定位要求
- 车场融合定位要求
- 道路自动驾驶定位要求
- 泊车入位定位要求
- 初始定位要求
- 场端辅助定位
- 定位功能失效
- 失效场景
- 失效类型
- 失效处理
停车场场地规范
场地分级规范
由于全国各地停车场差异很大,光照、标识、车道线、车位线、网络覆盖等条件差异巨大。当前可落地的AVP解决方案无法适用于所有停车场。只有经过不同程度改造的停车场,才能适应不同自动驾驶级别的AVP车辆。自动驾驶级别越高的车辆,对停车场的等级要求越低;自动驾驶级别越低的车辆,对停车场的等级要求越高。经过改造并认证的停车场,应在停车场门口展示AVP等级标识。只有匹配的自动驾驶车辆才能在该停车场实施自主代客泊车。停车场分级建议如下表所示。其中“O”代表符合对应的描述,“/”表示不符合对应的描述,“可选”表示不一定符合。
| 停车场分级 | ||||||
|---|---|---|---|---|---|---|
| 分级描述 | 原始停车场(P0) | 规范停车场(P1) | 有专用标识的停车场(P2) | 有场端的停车场(P3) | 有场端+V2X的停车场(P4) | AVP专用停车场(P5) |
| 车道线清晰 | 至少有一项条件不满足 | O | O | O | O | O |
| 地面平整 | O | O | O | O | O | |
| 车位大小符合要求 | O | O | O | O | O | |
| ≥5Mps带宽 | O | O | O | O | O | |
| 车位尺寸标准 | O | O | O | O | O | |
| 地面不反光 | O | O | O | O | O | |
| 光照强度≥50lux | O | O | O | O | O | |
| 光照分布均匀 | / | / | / | O | O | / |
| ≥100Mps带宽 | / | / | / | O | O | / |
| 网络延迟≤200ms | / | O | O | / | / | O |
| 网络时延≤50ms | / | / | / | O | O | 可选 |
| 移动网络信号良好 | / | / | O | O | O | O |
| 有停车场管理运营人员 | / | / | O | O | O | O |
| 有稳定的电源供应 | / | / | / | O | O | 可选 |
| 出入口提供开阔空间 | / | / | / | / | O | 可选 |
| 停车场标记数量合理 | / | / | / | O | O | 可选 |
| 配置AVP专用标记 | / | / | O | O | O | O |
| 有运营所需机房空间 | / | / | / | O | O | 可选 |
| 场端配置监控摄像头 | / | / | O | O | O | O |
| 采集过高精度地图 | / | / | O | O | O | O |
| 场端配置激光雷达或UWB或其他定位设备 | / | / | / | O | O | 可选 |
| 有远程接管能力 | / | / | / | O | O | 可选 |
| 场端具备车辆、障碍物和行人感知能力 | / | / | / | / | O | 可选 |
| 场端支持V2X | / | / | / | / | O | 可选 |
| AVP专用 | / | / | / | / | / | O |
| 车辆自动驾驶级别和配置与特定级别AVP 停车场匹配 | ||||||||
|---|---|---|---|---|---|---|---|---|
| P0 | P1 | P2 | P3 | P4 | P5 | |||
| P2+AVP专用 | P3+AVP专用 | P4+AVP专用 | ||||||
| L2+联网 | No | No | No | No | No | No | No | Yes |
| L2+联网+V2X | No | No | No | No | Yes | No | No | Yes |
| L3+联网 | No | No | No | No | No | No | No | Yes |
| L3+联网+V2X | No | No | No | No | Yes | No | No | Yes |
| L4+联网 | No | No | Yes | Yes | Yes | Yes | Yes | Yes |
| L5+联网 | No | Yes | Yes | Yes | Yes | Yes | Yes | Yes |
场地标识规范
场地标识是在AVP产品中人为布置在停车场内外的具有一定规则,专用于AVP车辆的标识,用于辅助识别车辆在停车场的位置,和帮助用户识别在停车场中的位置。AVP适用场地标识应符合各地停车场建设相关规范,满足相关建设指导。AVP场地标识应具备以下特点:在同一停车场内具有唯一ID(全局唯一),可快速施工,成本可控,整体不影响停车场美观等。

位置标识
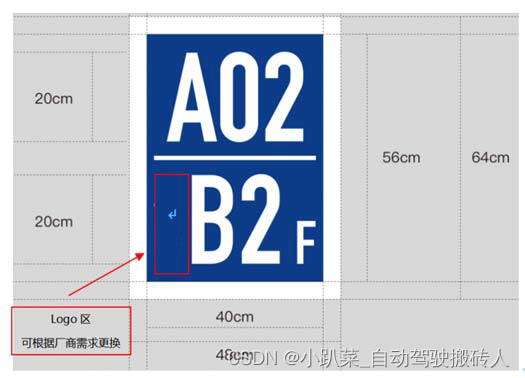
典型的AVP停车场位置标识的设计方案,包含如下内容:
1. 尺寸:64cm*48cm;
2. 材质:铝板+反光膜;
3. 区域:A 代表当前位置处于停车场A 区02 代表在该停车区内具体的位置编号;
4. 楼层:B 代表当前位置为地下(地上则为L),2 代表当前位置处于地下2 层;
5. Logo:可根据厂商要求进行更改。
跨层标识


典型的AVP停车场跨层标识的设计方案,包含如下内容:
1. 尺寸:64cm*51cm;
2. 材质:铝板+反光膜;
3. 走向:与箭头方向一致;
4. 起始点:B 代表起点在地下(地上则为L),2 代表为地下二层;
5. 位置:0 代表地下二层的起点,若为1 则代表从地下二层起点开始的第1 个标识牌,以此类推。
十字路口标识
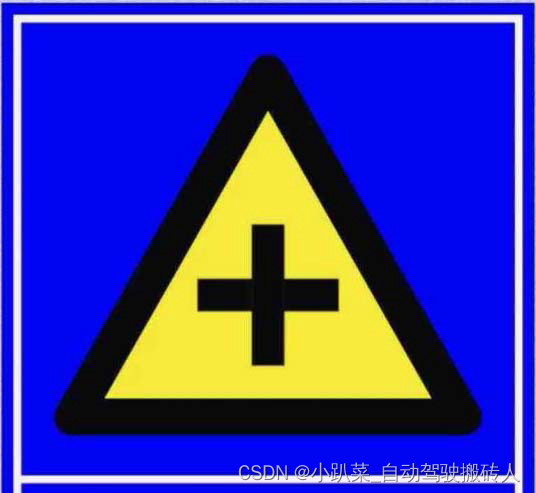
典型的AVP停车场十字路口处标识的设计方案,包含如下内容:
1. 尺寸:40cm*30cm;
2. 材质:铝板+反光膜;
3. 内容:十字路口标识。
丁字路口处标识

典型的AVP停车场丁字路口处标识的设计方案,包含如下内容:
1. 尺寸:40cm*30cm;
2. 材质:铝板+反光膜;
3. 内容:丁字路口标识。
闸口/收费口标识

典型的AVP停车场闸口/收费口标识的设计方案,包含如下内容:
1. 尺寸:20cm*30cm;
2. 材质:铝板+反光膜;
3. 内容:闸口提示语,该标语『一车一杆』可根据实际情况替换。
上下车点标识

典型的AVP停车场上下车点标识的设计方案,包含如下内容:
1. 尺寸:160cm*70cm;
2. 材质:铝板+反光膜;
3. 内容:上下车点特殊标识采用字母『P』,01 代表第一个上/下车点。
定位功能要求
AVP泊车过程中,环境、定位精度和信息交互等对泊车效果、泊车安全、泊车体验等有一定影响,其中定位精度对地图内容以及地图精度有很强的依赖,在不同的环境条件下和功能场景对定位精度的要求也不同。
环境要求
AVP泊车场景包括地面和室内两种场景,常用定位技术包括GPS、IMU、视觉、激光等。要满足定位要求,AVP停车场环境应满足以下要求:
1. 信号覆盖要求:以车端智能为主,基于场端改造,场端提供定位信号,信号覆盖停车场内所有可行驶区域和可泊车区域;
2. 基本环境要求:光线在30~100000 lux;实时雨量不高于小雨、实时雪量不高于小雪、能见度不低于200m;地面和立体标志标记和底色对比清晰、无明显反光、标志无水、雪、落叶、污物等覆盖;(标志密度)停车场中任意通道行进10m,可见可识别标志不少于6 个。
定位精度要求
AVP自主泊车在三个场景对定位精度有不同的要求:一是从起始位置自动驾驶到停车位附近,二是自主泊车进入停车位, 三是停车场内车辆启动时初始定位。两个阶段对定位精度有着不同的要求。
场端定位要求
包括道路自动驾驶与泊车入位定位两种场景。
道路自动驾驶定位要求
1. 行车速度:不高于15km/h;
2. 定位精度(相对精度):
2.1 横向定位误差不大于20cm
2.2 纵向定位误差不大于30cm
2.3 高度误差不大于30cm
2.4 偏航角误差不大于5°
泊车入位定位要求
泊车过程定位精度(相对精度):
1. 横向定位误差不大于5cm
2. 纵向定位误差不大于5cm
3. 偏航角误差不大于3°。
车端定位要求
包括道路自动驾驶、泊车入位及初始定位三种场景。
道路自动驾驶定位要求
1. 行车速度:不高于15km/h;
2. 定位精度(相对精度):
2.1 横向定位误差不大于20cm
2.2 纵向定位误差不大于30cm
2.3 高度误差不大于30cm
2.4 偏航角误差不大于5°。
泊车入位定位要求
泊车过程定位精度(相对精度):
1. 横向定位误差不大于5cm
2. 纵向定位误差不大于5cm
3. 偏航角误差不大于3°
初始定位要求
车辆启动时需要定位自身在停车场内的位置,包括车辆位于停车位内情景和位于非停车位区域的场景,定位精度要求如下(相对精度):
1. 横向定位误差不大于20cm
2. 纵向定位误差不大于20cm
3. 高度误差50cm(应准确定位到楼层)
4. 偏航角误差不大于5°
车场融合定位要求
道路自动驾驶定位要求
1. 行车速度:不高于15km/h;
2. 定位精度(相对精度):
2.1 横向定位误差不大于20cm
2.2 纵向定位误差不大于50cm
2.3 高度误差不大于30cm
2.4 偏航角误差不大于3°
泊车入位定位要求
泊车过程定位精度(相对精度):
1. 横向定位误差不大于10cm
2. 纵向定位误差不大于20cm
3. 偏航角误差不大于3°
初始定位要求
车辆启动时需要定位自身在停车场内的位置,包括车辆位于停车位内情景和位于非停车位区域的场景,定位精度要求如下(相对精度):
1. 横向定位误差不大于20cm
2. 纵向定位误差不大于20cm
3. 高度误差50cm(应准确定位到楼层)
4. 偏航角误差不大于5°。
场端辅助定位
AVP自主泊车功能的实现主要以车端自身传感识别定位能力与停车场智能改造相结合技术路线时,应满足要求:
1. 带宽的下载/上传5Mbps
2. 频率不低于20Hz
3. 时延不高于50 ms
4. 无线接入点(AP)间漫游不间断且间断时间2s自动上报。
定位功能失效
失效场景
失效场景包含场端通讯连接失效、场端车辆被遮挡位于传感器盲区、地图下载失败、场景与地图不匹配、视觉特征数量不足。
失效类型
失效类型分为无法定位、定位出错、场景更新。
失效处理
失效处理措施为即时停车、安全区域停车、云端/场端接管、上报信息给场/云端。
这篇关于泊车功能专题介绍 ———— AVP系统技术要求之场地规范定位要求的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






