毫米波专题

毫米波移动通信系统中的波束赋形
在毫米波移动通信系统中,系统的频点较高,因此毫米波系统的射频器件易于小型化,然而同时也带来绕射能力差、穿透损耗大、路径损耗大[4][5]等缺点,这将大大降低了毫米波通信系统的接收功率,其中阻挡效应被认为是制约毫米波应用于移动通信系统的关键因素之一。为了对抗毫米波移动通信系统的噪声受限问题,目前普遍认为在毫米波移动通信系统中将会在发射端和接收端上同时使用天线阵列进行发送和接收[4][5],因此必须要

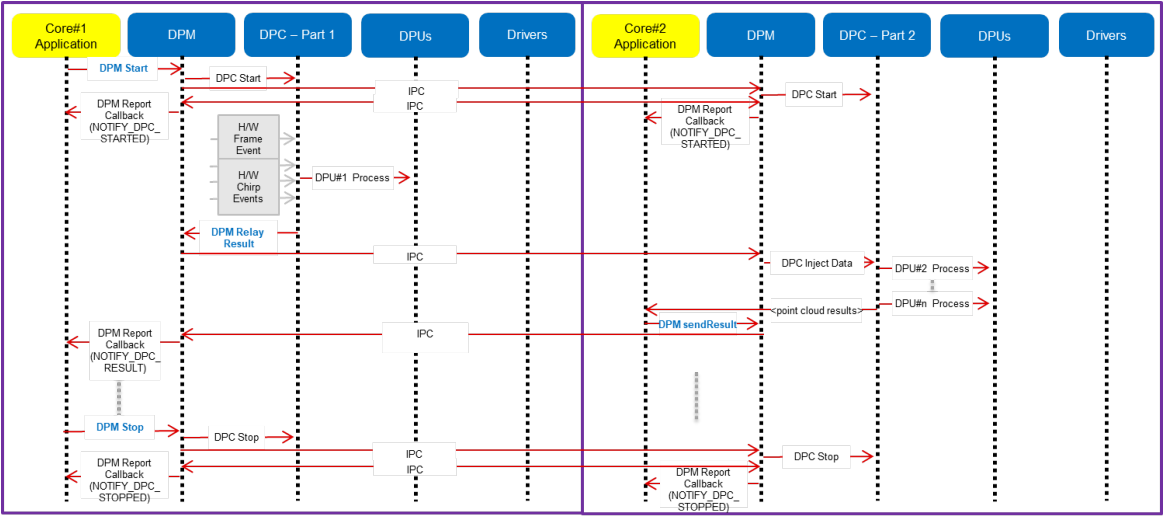
AM273X毫米波演示
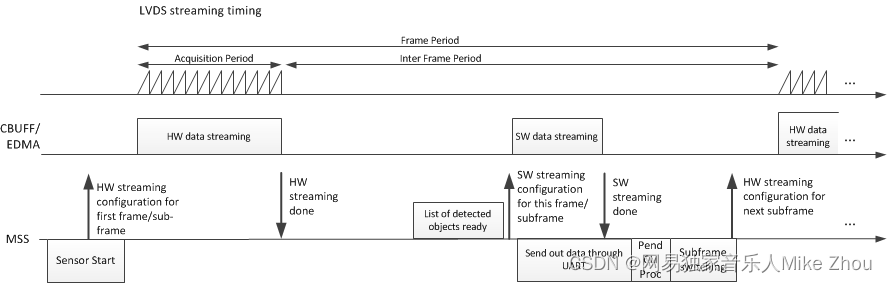
介绍 毫米波演示展示了 AM273X SOC 使用毫米波 SDK(软件开发工具包)中的驱动程序的一些功能。它允许用户指定chirp配置文件并实时显示检测到的对象和其他信息。 以下是此演示功能的高级描述: 能够通过 UART 端口上的命令行界面 (CLI) 或通过 TI Gallery 应用程序 - 毫米波演示展示台 - 指定所需的线性调频配置文件,该应用程序允许用
毫米波雷达深度学习技术-1.6目标识别1
1.6 目标识别 利用检测和跟踪在距离、多普勒和角度这两个维度中的任意一个进行精确的目标定位后,将检测到的目标分类到所需的类别中。与检测类似,提出了多种框架来同时使用图像和点云进行目标分类。使用图像进行目标分类的最常见方法是从检测到的目标特征中沿距离-角度和距离-多普勒维提取手工设计的特征[32-34]。最常见的特征是距离、多普勒、到达方向的平均值,以及从唯一目标簇中检测到的所有
毫米波雷达深度学习技术-1.6目标识别2
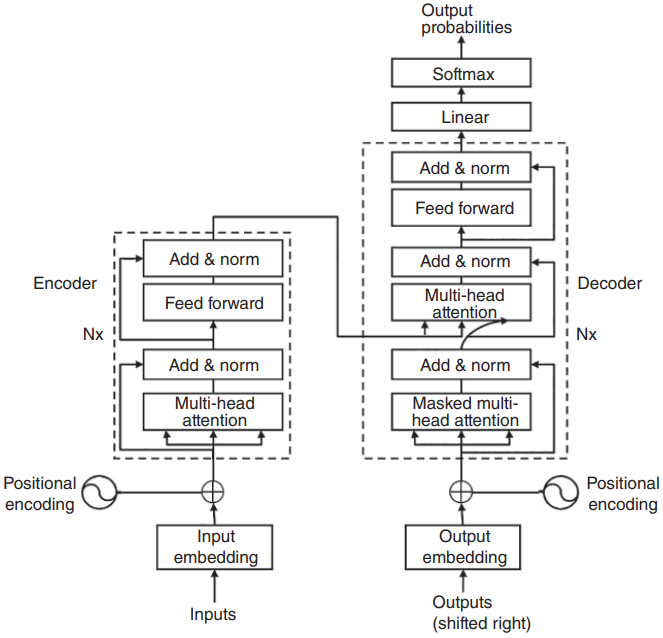
1.6.4 自动编码器和变体自动编码器 自编码器包括一个编码器神经网络,随后是一个解码器神经网络,其目的是在输出处重建输入数据。自动编码器的设计在网络中施加了一个瓶颈,它鼓励原始输入的压缩表示。通常,自编码器旨在利用数据中的关键结构将输入压缩成网络的瓶颈或潜在空间表示,这足以重建原始输入数据。因此,它被用于降维和去噪等应用。 该模型包括一个由θ参数化的编码器函数g和一个
毫米波雷达阵列天线设计综合1(MATLAB仿真)
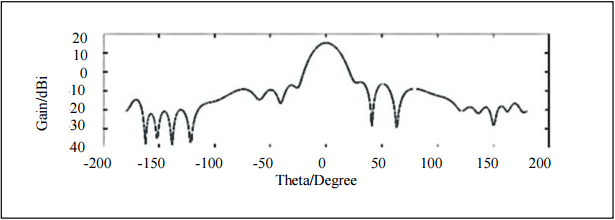
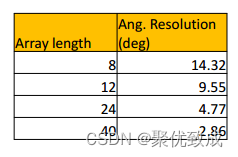
1 天线设计目标 毫米波雷达探测目标的距离、速度和角度,其中距离和角度和天线设计相关性较强。天线增益越高,则根据雷达方程可知探测距离越远;天线波束越窄,则角度分辨率越高;天线副瓣/旁瓣越低,则干扰越少,虚假目标越少。 天线的性能直接影响雷达性能,现代的毫米波雷达几乎都使用阵列天线。阵列天线是根据电磁波在空间相互干涉的原理,把具有相同结构、相同尺寸的基本天线单元按照一
毫米波雷达深度学习方法和技术-概述
深度学习方法和技术—在毫米波雷达解决方案的进展 前言 雷达已经从复杂的高端军事技术演变为相对简单的低端解决方案,渗透到工业、汽车和消费市场领域。这种快速发展是由硅的进步和使用深度学习算法来利用传感器数据的全部潜力所驱动的。雷达传感器的使用已经增长了许多倍,渗透到汽车、工业和消费市场,提供了大量的应用。深度学习的出现改变了许多领域,并在计算机视觉、自然语言处理、语音处理等领域产生了

(毫米波雷达数据处理中的)聚类算法(3) – K-means算法及其实践
说明 读者在阅读本文前,建议先看看本系列的前两篇文章:[1]:(毫米波雷达数据处理中的)聚类算法(1) --- 概述-CSDN博客 [2]:(毫米波雷达数据处理中的)聚类算法(2) – DBSCAN算法及其实践-CSDN博客 K-means算法因为需要提前给出簇的数量,(这在车载雷达的实际应用上是不可取的:我们无法确定在行车过程中车辆前方有多少个目标物,相反地,我们是聚类之后
4D 成像毫米波雷达:新型传感器助力自动驾驶
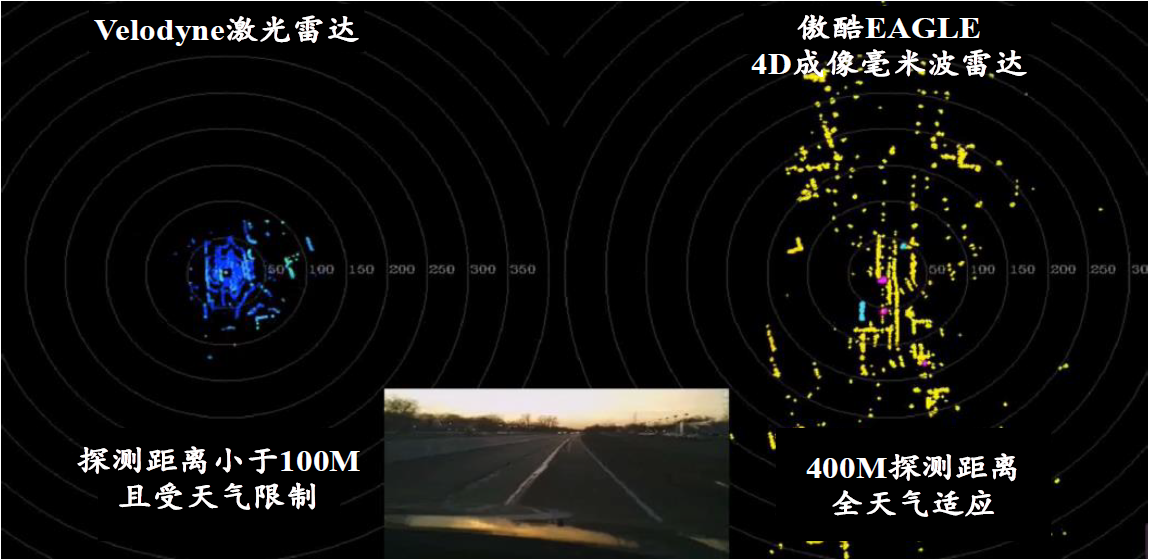
1 感知是自动驾驶的首要环节,高性能传感器必不可少 感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物体等信息进行有效捕捉,根据实时感知的环境信息,自动驾驶系统得以完成接下来的决策、规划与控制等环节。传感器的性能会直接影响到感知信息的质量,目前广泛搭载的传感器有摄像头、激光雷达、毫米波雷达、
自动驾驶学习2-毫米波雷达
1、简介 1.1 频段 毫米波波长短、频段宽,比较容易实现窄波束,雷达分辨率高,不易受干扰。波长介于1~10mm的电磁波,频率大致范围是30GHz~300GHz 毫米波雷达是测量被测物体相对距离、相对速度、方位的高精度传感器。 车载毫米波雷达主要有24GHz、60GHz、77GHz、79GHz四个频段。 24GHz 探测视角相对较大(一般可达150°),探测距离近(15-30m);雷达体积
毫米波雷达多人呼吸心跳检测MATLAB仿真
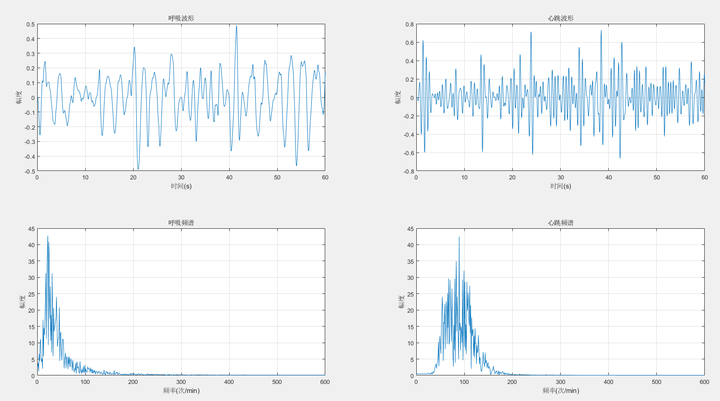
本文基于TI的IWR1642毫米波雷达 2T4R MIMO阵列,通过实际采集数据算法仿真,实现多人呼吸心跳检测。 文章末尾给出了本文的仿真代码。 主要内容包含: (1)雷达参数设定 (2)ADC数据导入 (3)均值相消和距离维FFT(脉冲压缩) (4)DOA估计,获取目标的距离-角度位置 (5)峰值搜索确定目标峰值(这里以2个目标为例,但目标的个数可以超过2个,主要看雷达的算力最大能够支持多少个目
【百度Apollo】探索自动驾驶:新版本 Beta全新升级算法方向支持4D毫米波,引入新模型提供增量训练
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! 文章目录 引入一、背景介绍二、引入全新模型,算法检测效果显著提升2.1、更强大易用的激光雷达检测模型CenterPoint检测效果示意 2.2 Beta激光雷达检测的优势检测效果示意 三、相机检测,Yolo X+Yolo 3D

毫米波雷达模块在高精度人体姿态识别的应用
人体姿态识别是计算机视觉领域中的重要问题之一,具有广泛的应用前景,如智能安防、虚拟现实、医疗辅助等。毫米波雷达技术作为一种无需直接接触目标就能实现高精度探测的感知技术,在人体姿态识别领域具有独特的优势。本文将探讨毫米波雷达模块在高精度人体姿态识别中的应用场景、原理和技术挑战,旨在为推动人体姿态识别技术的发展提供技术支持和理论指导。 人体姿态识别是指通过计算机视觉技术识别和跟踪人体的姿态和
【TI毫米波雷达】官方工业雷达包的生命体征检测环境配置及避坑(Vital_Signs、IWR6843AOPEVM)
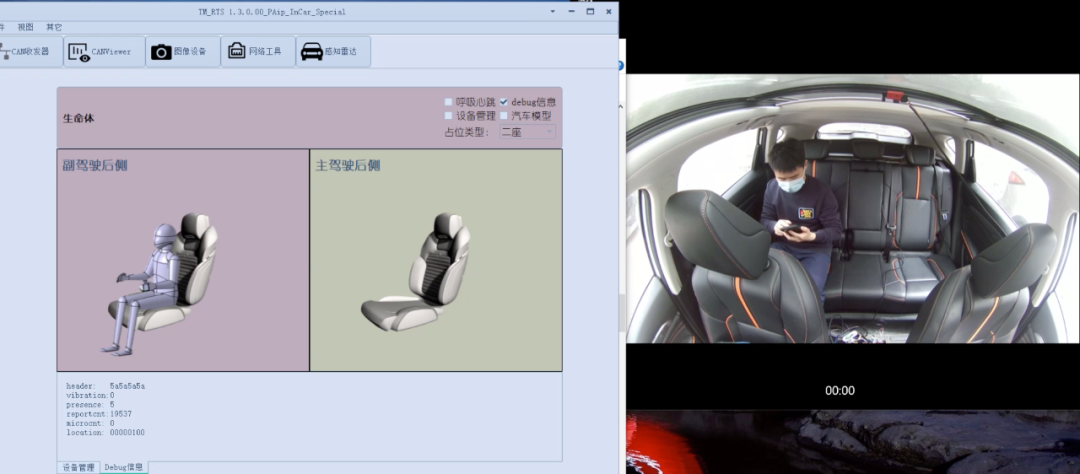
【TI毫米波雷达】官方工业雷达包的生命体征检测环境配置及避坑(Vital_Signs、IWR6843AOPEVM) 文章目录 生命体征基本介绍IWR6843AOPEVM的配置上位机配置文件避坑上位机start测试距离检测心跳检测呼吸频率检测空环境测试 附录:结构框架雷达基本原理叙述雷达天线排列位置芯片框架Demo工程功能CCS工程导入工程叙述Software TasksData PathOu


4D毫米波雷达原理和系统方案
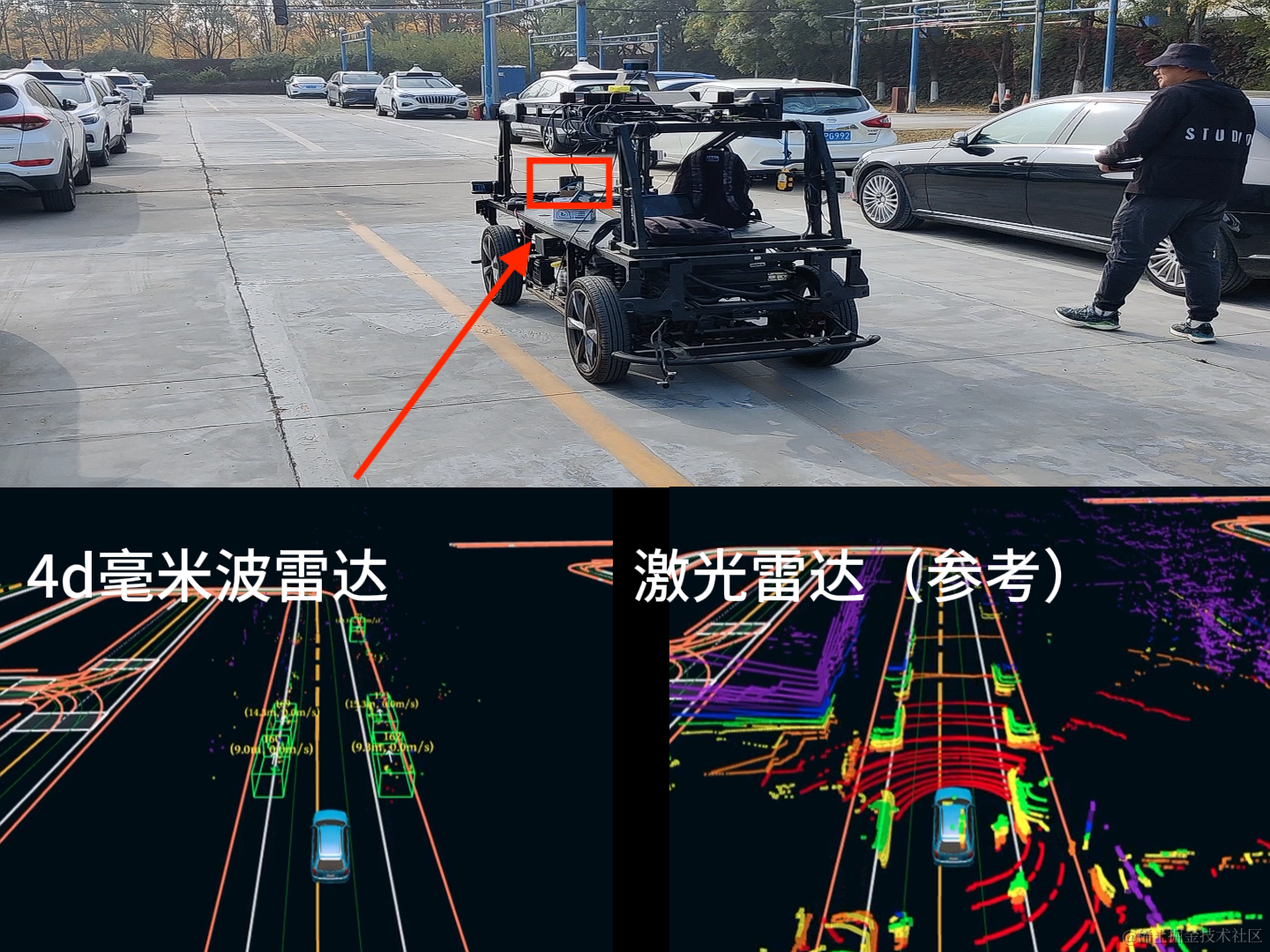
4D毫米波雷达原理和系统方案 附赠自动驾驶学习资料和量产经验:链接 4D毫米波雷达的性能比一般的“3D”雷达要高,体现在距离远,精度高,角分辨率高等方面。 那么4D成像毫米波雷达是如何做到的呢? 本篇文章从雷达指标方程上进行简要的解释,以及介绍一下主流的4D毫米波雷达系统方案。 1. 雷达关键指标方程 2. 为什么必须要增大天线孔径 如果让雷达波束尽可能窄,配合扫描机构实

毫米波雷达的主要应用分类
毫米波雷达顾名思义就是工作在毫米波波段(30-300 GHz)的雷达。目前毫米波的应用主要有以下几类: 1). 制导雷达、火控雷达,该类型雷达目前有一些选择在毫米波波段的主要原因是提高探测能力、减小雷达体积,降低重量和体积,便于集成。 2). 目标检测雷达,该类型雷达主要是通过机械/电子波束扫描ÿ
论文速览 | IEEE TVT 2024 | 基于毫米波雷达的游轮隐蔽威胁检测 | mmCTD: Concealed Threat Detection for Cruise Ships Via Mm
无线感知/雷达成像部分最新工作<持续更新>: 链接地址 注1:本文系“无线感知论文速递”系列之一,致力于简洁清晰完整地介绍、解读无线感知领域最新的顶会/顶刊论文(包括但不限于 Nature/Science及其子刊; MobiCom, Sigcom, MobiSys, NSDI, SenSys, Ubicomp; JSAC, 雷达学报 等)。 本次介绍的论文是: IEEE TVT 2024 |

中国毫米波雷达产业分析3——毫米波雷达市场分析(一、二、三)
一、总体市场 (一)总规模 近几年,得益于汽车智能化的高速发展与雷达芯片制作工艺的进步,国内毫米波雷达整体市场增速较快。根据初步测算,2022年中国毫米波雷达市场总规模达到86亿元,实现同比增长24.6%。 图表 23:2018-2022年中国毫米波雷达市场规模(亿元) (二)市场结构 从各频率细分产品的市场结构来看,2022年国内77GH
中国毫米波雷达翻盘的契机来临
伴随着中国新车搭载ADAS功能的高速增长,中国毫米波雷达迎来了前所未有的机遇期。 根据高工智能汽车研究院监测数据显示,2021年中国市场(不含进出口)乘用车新车前装标配L2级ADAS上险量为395.62万辆,同比增长77.65%。而2022年,L2级ADAS的上险量继续保持了高速增长态势。 作为ADAS系统不可或缺的传感器,毫米波雷达迎来了广阔的“蓝海”市场。高工智能汽车研究院数据显示,202
智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助
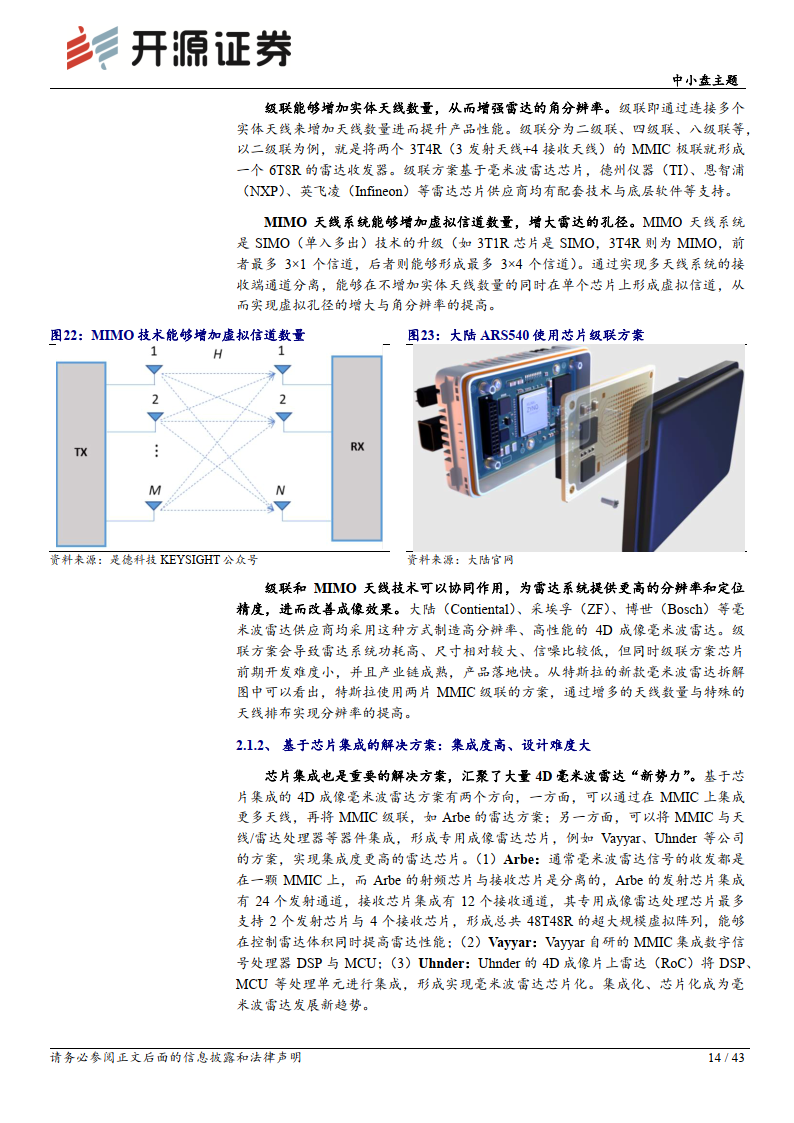
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。 (报告出品方:开源证券) 报告共计:43页 视觉感知最佳辅助——4D 成像毫米波雷达 感知是自动驾驶的首要环节,高性能传感器必不可少 感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶 的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物
汽车电子 -- 毫米波雷达
参看:自动驾驶感知——毫米波雷达 一、雷达分类 按信号形式:脉冲体制、连续波体制等按测量参数:测速雷达、成像雷达等按扫描方式:机械扫描、电子扫描(数字波束形成、相控阵)等按工作方式:多普勒雷达、合成孔径雷达(SAR)等按信号频率:短波、微波(包括毫米波)、太赫兹、(激光)等按信号带宽:窄带雷达、宽带雷达、超宽带雷达等 二、雷达基本工作原理 主流车载毫米波雷达所采用的的调制信号为调频连续波
TI毫米波雷达开发——High Accuracy Demo 串口数据接收及TLV协议解析 matlab 源码
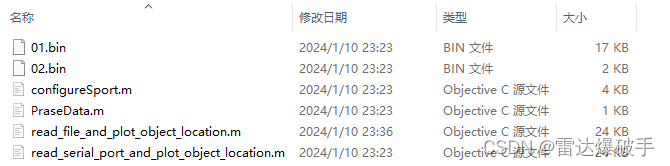
TI毫米波雷达开发——串口数据接收及TLV协议解析 matlab 源码 前置基础源代码功能说明功能演示视频文件结构01.bin / 02.binParseData.mread_file_and_plot_object_location.mread_serial_port_and_plot_object_location.m 函数解析configureSport(comportSnum)rea

TI 毫米波雷达开发系列之mmWave Studio 和 Visuiallizer 的异同点雷达影响因素分析
TI 毫米波雷达开发之mmWave Studio 和 Visuiallizer 的异同点 引入整个雷达系统研究的目标分析影响这个目标的因素硬件影响因素 —— 雷达系统的硬件结构(主要是雷达收发机)AWR1642芯片硬件系统组成MSS 和 DSS 概述MSS 和 DSS 分工BSS的分工AWR1642 组成及分工总结 雷达收发机对雷达检测效果的影响影响雷达测距效果的因素测速及其他指标的影响三种
深度通信网络专栏:基于GAN生成对抗网络的毫米波信道估计
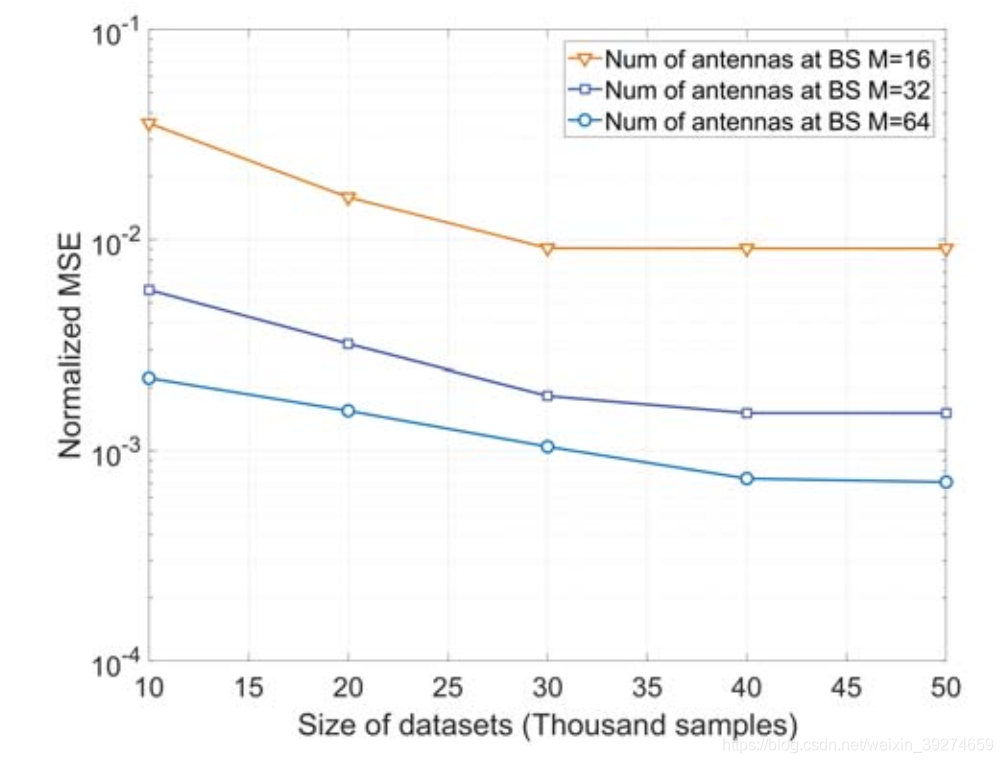
本文地址:Generative Adversarial Estimation of Channel Covariance in Vehicular Millimeter Wave Systems 文章目录 前言文章中心思想系统模型信道模型网络相关稀疏变换 网络模型具体网络设计:生成器判别器 仿真结果 前言 深度通信网络专栏: 快速上手: 2018-2019年最新深度学
4D毫米波雷达——ADCNet 原始雷达数据 目标检测与可行驶区域分割
前言 本文介绍使用4D毫米波雷达,基于原始雷达数据,实现目标检测与可行驶区域分割,它是来自2023-12的论文。 会讲解论文整体思路、输入分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:ADCNet: Learning from Raw Radar Data via Distillation 1、模型框架 ADCNet只使用雷达信息,实现车辆检测和可行驶