本文主要是介绍自动驾驶学习2-毫米波雷达,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1、简介
1.1 频段
毫米波波长短、频段宽,比较容易实现窄波束,雷达分辨率高,不易受干扰。波长介于1~10mm的电磁波,频率大致范围是30GHz~300GHz
毫米波雷达是测量被测物体相对距离、相对速度、方位的高精度传感器。
车载毫米波雷达主要有24GHz、60GHz、77GHz、79GHz四个频段。
24GHz
探测视角相对较大(一般可达150°),探测距离近(15-30m);雷达体积大,频率低、带宽比较窄(250MHz)、精度相对较差。因为带宽窄,精度差,车载场景已经逐步被77GHz替代。
60GHz
常常被用于儿童防遗忘功能和入侵检测功能。超宽的带宽资源使得60GHz毫米波雷达具有超高的检测精度,可以达到5mm,可以检测到车内儿童的呼吸。
77GHz
主要应用于前向碰撞预警(FCW)、紧急制动(AEB)、自适应巡航(ACC)等功能中;装配在车辆的前保险杠上,探测与前车的距离以及前车的速度,用于实现主动安全领域的功能;一般根据实际需求,探测距离可选择远、中、近进行组合(100-200m);天线体积约为24G的1/3,频率高、带宽较宽(800MHz),精度、性能优于24GHz,在车载感知领域已基本取代了24GHz。
完全实现ADAS L2各项功能一般需要“1长+4中短”5个毫米波雷达,要是实现更高等级的自动驾驶需要增加长距和中短距雷达的数量。
79GHz
未来发展方向,取代现有77GHz及24GHz;带宽非常宽,要比77GHz的高出3倍以上;分辨率较高(带宽越大、分辨率越高),可以达到5cm。
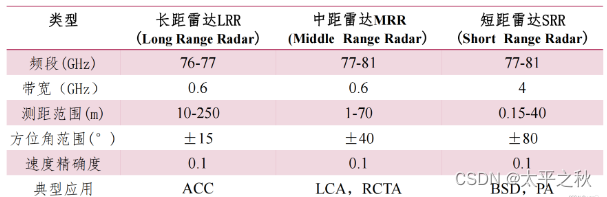
1.2 优缺点
车载雷达传感器功能及优缺点各有不同,相关比较如下表所示:

2、基本原理
2.1 工作原理
典型的毫米波雷达信号处理流程如下:首先,雷达射频前端采集模拟信号,并通过ADC将模拟信号转换为数字信号。其次,信号处理单元对数字信号号进行预处理,抑制干扰,然后分别在距离和多普勒维度进行FFT(傅里叶变换)运算,得到多个天线的二维距离-多普勒频域结果。在此基础上进行数字波束成形(Beamforming),通过恒虚警率(CFAR)过滤,筛选出点目标等。之后对已经过滤出的点目标进行DOA进行角度计算,并基于提取出的为点目标距离、速度和角度信息进行聚类,完成目标检测。之后进行目标跟踪预测、目标分类。

2.2 FMCW原理
在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(Frequency Modulated Continuous Wave, FMCW),频移键控(Frequency Shift Keying, FSK)以及相移键控(Phase Shift Keying, PSK)。主流车载毫米波雷达所采用的的调制信号为调频连续波FMCW。
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度。测距测速是通过分析发射和接收的调频连续之间的区别来实现。测量角度是通过计算不同天线单元之间的延时差来计算。
距离检测和 速度检测



角度检测
一对收发机所采集到的信号是不具备角度信息的, 因此需要采用多路发射多路接收的架构,或者采用相控阵架构。短波长和小天线孔径就很有必要了,短波长意味着波束更窄,能量更加集中;更小的孔径尺寸意味着系统上能集成更多的天线单元,这些都有利于提高角分辨率。 角度检测的原理就是通过不同接收天线接收的相位差异来区分角度。

3、硬件相关
3.1系统组成
天线:是发射和接收毫米波调频信号的组件。天线设计是车载毫米波雷达的关键设计之一。天线通常采用微带贴片天线。微带贴片天线需要选用起超低损耗的PCB材料作为最上层天线设计的载板,以降低电路损耗,增大天线增益。
射频MMIC芯片: 集成低噪声放大器(LNA)、功率放大器(PA)、混频器(MIXER)、检波器(Detector)、滤波器(Filter)、压控震荡器(VCO)、移相器、模数转换器(ADC)等,用以实现毫米波信号的调制、发射、接收以及回波信号的解调。
数字信号处理器:负责处理前端采集的中频信号,获得速度、距离、角度信息。数字信号处理通过DSP、FPGA芯片实现。
软件算法:为雷达提供一套工作流程和规则。软件算法包括信号处理算法和数据处理算法。
3.2 硬件接口
涉及接插件信息
3.3 数据传输协议
传输层协议:网口UDP/IP协议,或者CAN接口
数据传输类型主要是涉及原始数据的点云ID、距离、速度、水平角度 、信噪比、动态属性、点云有效性以及时间戳,E2E校验等信息。
一般零部件供应商只提供目标ID,X\Y向距离 速度 加速度 标准差、概率,目标分类、动静态属性等信息,还有有效性以及时间戳,E2E校验等信息。
一般还会将雷达本身的状态发出,比如标定信息,温度信息,故障信息等。
4、算法相关
自动驾驶毫米波雷达物体检测技术-算法 - 知乎
5、标定相关
文章引用:
https://www.eet-china.com/mp/a290751.html

6、车载毫米波雷达重要参数
常见参数:
•测量性能 测距范围
距离/水平角/速度 分辨率 (可对两个物体进行区分的最小单位)、点云数量、功耗等
距离/水平角/速度 精度 (测量不确定性)
•操作条件 雷达发射功率、传输能力、电源、功耗、操作温度
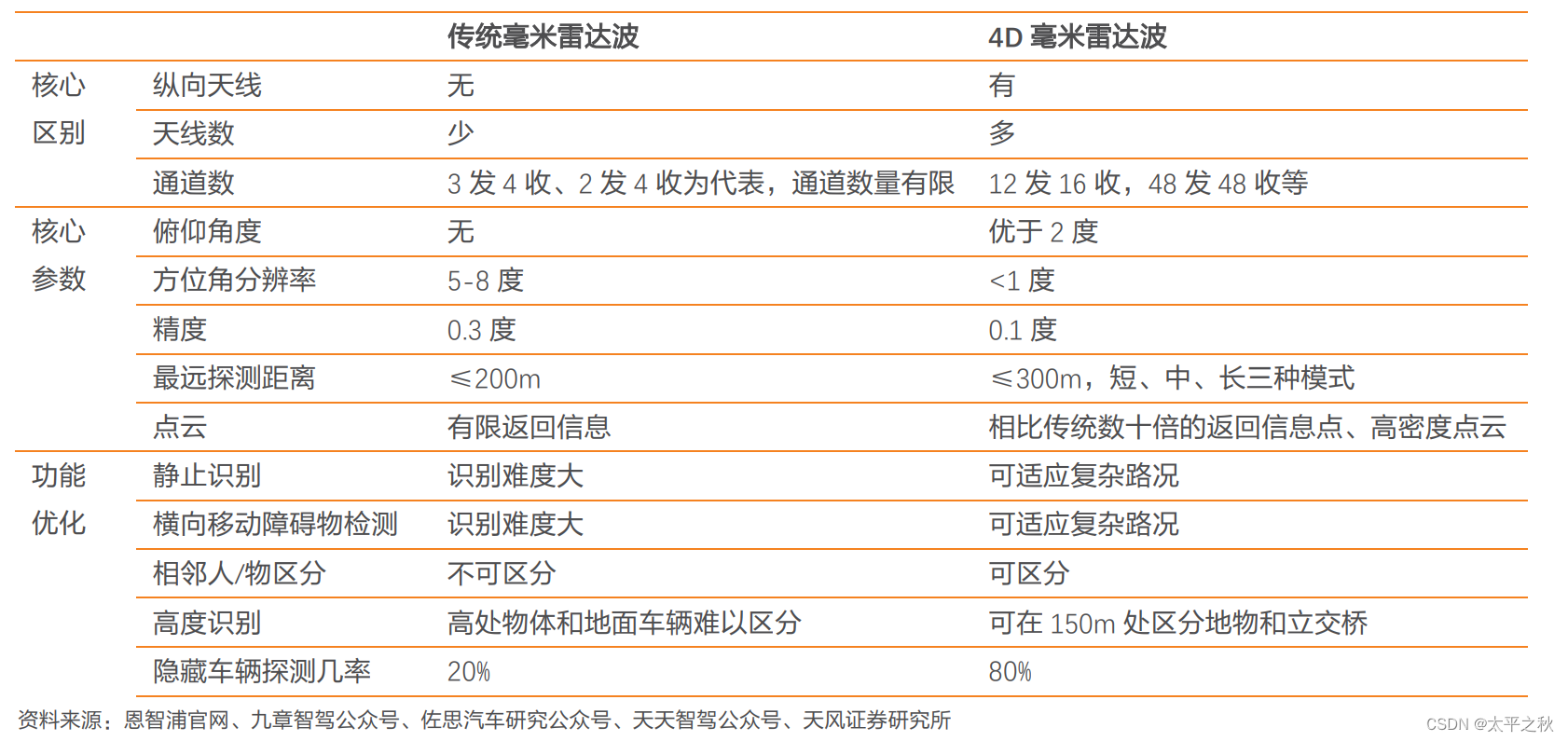
7、4D毫米波雷达
4D毫米波雷达——原理、对比、优势、行业现状-CSDN博客, 引用如下
4D毫米波雷达定义:能提供垂直高度信息(在坡道等工况提供高度,能防止误报)
原理:

绿色框内的发射天线和红色框的接收阵列协同工作在垂直方向上形成了一种虚拟孔径阵列,从而实现了高度方向上的测量,能够提供目标的高度信息(上图中的绿色框)。
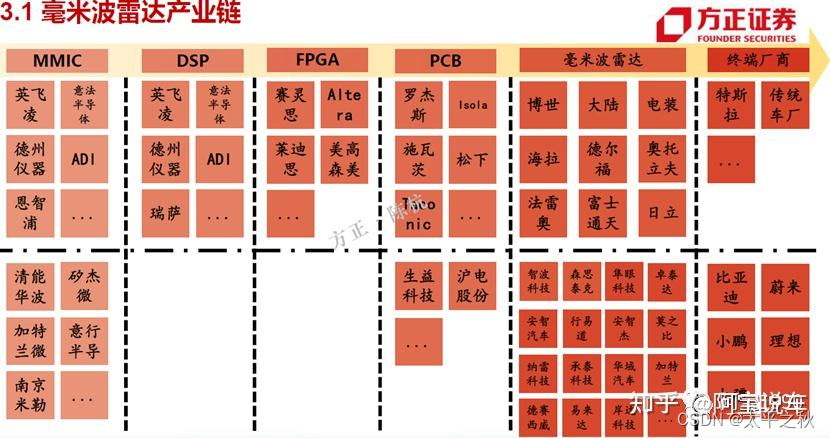
8、产业及现状
国际:系统目前是被海外的巨头控制着,例如大陆( continental )、 博世( Bosch )、海拉( Hella )、德尔福 ( Delphi )、奥托立夫( Autoliv )等,核心元器件也主要被英飞凌( Infineon )、德州仪器 ( TI )、意法半导体( ST )、亚德诺半导体( ADI )等垄断.
国内:
行易道科技、华域汽车、集眼科技、智波科技、森思泰克、衰米波技术、意行半导体、清能华波、矽杰微电子、加特兰微电子等。
产业链引用如下:
这篇关于自动驾驶学习2-毫米波雷达的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







