本文主要是介绍汽车电子 -- 毫米波雷达,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
参看:自动驾驶感知——毫米波雷达
一、雷达分类
- 按信号形式:脉冲体制、连续波体制等
- 按测量参数:测速雷达、成像雷达等
- 按扫描方式:机械扫描、电子扫描(数字波束形成、相控阵)等
- 按工作方式:多普勒雷达、合成孔径雷达(SAR)等
- 按信号频率:短波、微波(包括毫米波)、太赫兹、(激光)等
- 按信号带宽:窄带雷达、宽带雷达、超宽带雷达等
二、雷达基本工作原理
主流车载毫米波雷达所采用的的调制信号为调频连续波FMCW。
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度。
三、雷达测量原理
- 测距:电磁波在空气中以光速传播,对于不同距离的目标,电磁波返回时间与距离成正比。
- 测速:电磁波拥有频率属性,对于不同相对速度的目标,回波会产生多普勒频移,其频率变化量与相对速度成正比。
- 测角:单个接收天线不能测角,多个接收天线回波之间的相位差,与目标相对于雷达的方向角有一定对应关系。
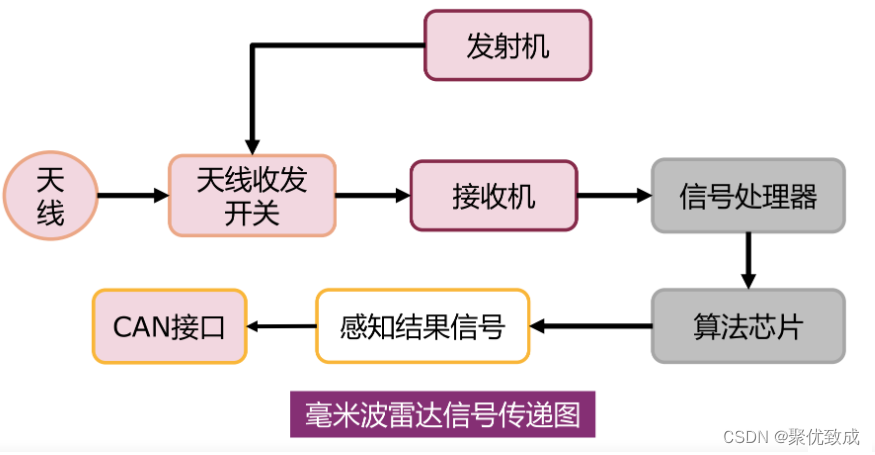
四、汽车雷达系统组成
- 天线向外发射毫米波,接收目标反射信号
- 信号处理器完成回波信号处理
- 算法芯片完成原始点云目标的进一步处理
- CAN接口完成毫米波处理数据的发送以及配置信息的输入
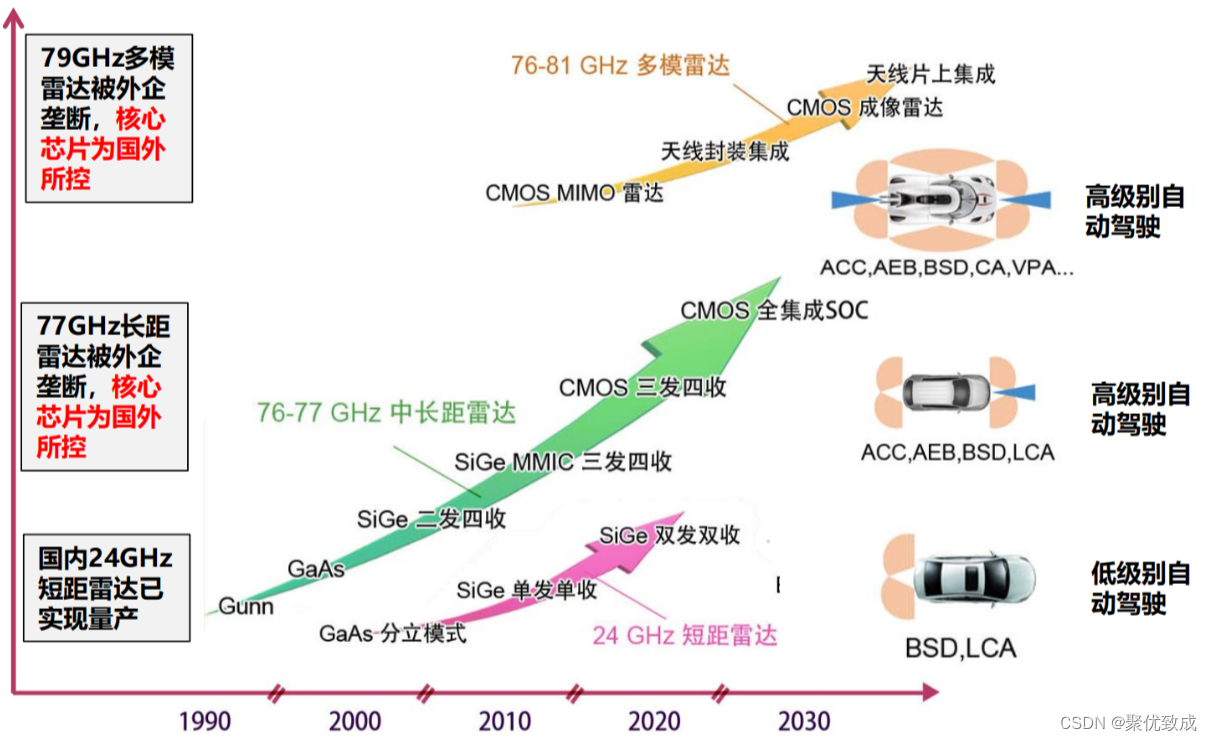
五、汽车毫米波雷达概述
- 雷达频段:24GHz、77GHz(76-77)、79GHz(77-81)。
- 应用领域:ADAS(高级辅助驾驶系统)、无人驾驶系统等。
- 应用功能:ACC(自适应巡航)、AEB(自动紧急刹车)、FCW(前向碰撞预警)、RCW(后向碰撞预警)、BSD(盲区检测)等。
- 安装位置:前方、侧方、后方、侧后方等。
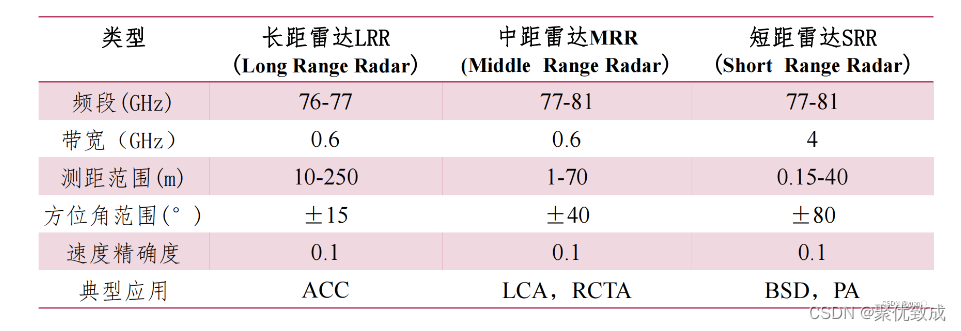
- 作用距离:远距、中距、近距、中近距等。
- 国外厂商:博世(Bosch)、大陆(Continental)、德尔福(Delphi)、奥托立夫(Autoliv)、海拉(Hella)、电装(Denso)等。
六、车载毫米波雷达的重要参数
参看资料:
TI的FMCW毫米波雷达培训
毫米波雷达在汽车和工业中的应用(入门必读教程)
常见参数
- 探测距离 (车辆0.5m ~ 200m 行人0.5m ~ 70m)
- 距离向精度 (±0.15 m)
- 距离向分辨率 ( 0.5 m)
- 测速范围 ( -260 km/h ~ 130 km/h)
- 测速精度 (±0.1 m/s)
- 测速分辨率 ( 0.3 m/s)
- 方位向视场角 (±5°@ 200 m ±15°@ 100 m ±22°@ 60 m ±45°@ 30 m)
- 方位向角精度 ( ±0.3°@ 0°)
- 方位向角分辨率 (3°~ 7°)
- 俯仰角探测范围 (-6°~ 6°)
- 最多目标数量 64
- 刷新率 (50ms)
指标分解
1、工作频段
2、探测距离
参看:雷达--------探测距离、分辨力、距离精度、方位精度、抗干扰力
这部分,只做了解。我是看不懂这些公式的。。。
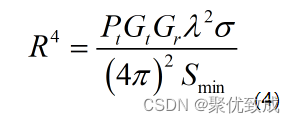
关于探测距离首先先从来了解一下雷达方程的简单行式。
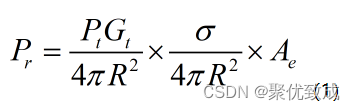
上式中右侧第一项表示的是增益为Gt的天线辐射功率为Pt在离雷达距离R处的功率密度。右侧第二项的分子σ是目标截面积(平方米),是目标返回雷达方向的能量的度量;分母表示回波信号能量在返回向雷达的途径上随距离的发散程度(为目标截面积)。这两项相乘得到的是每平方米上返回雷达的功率。Ae称为有效孔径面积。Pr为接收功率。所以求得的雷达的最大作用距离应为接收功率Pr等于雷达最小可检测信号Smin时雷达的探测距离。所以:
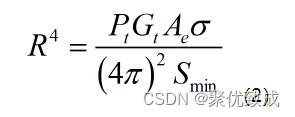
其中与发射增益Gt一样还有接收天线增益Gr。而接收天线增益Gr与有效孔径面积Ae的关系为:
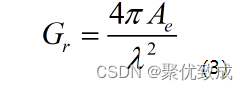
将3式代入2式中可得:
其中λ为雷达的信号波长。上式中的Smin受噪声以及系统的限制。可表示为:
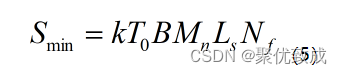
其中k为玻尔兹曼常数,T0为噪声温度、B为接收系统等效带宽、Mn为识别系数、Ls是系统损耗、Nf为噪声系数。
3、距离向精度和距离分辨率
参看:毫米波雷达入门知识
距离分辨率是在距离维上能够将两个距离很近的目标区分开的能力。而距离精度是单个目标测距精度这一点要区别开。关于距离分辨率这个我们先看图,图中的-3dB指的是3dB带宽,如果有不懂的可以直接网上搜一下这个概念还是很简单明了的。
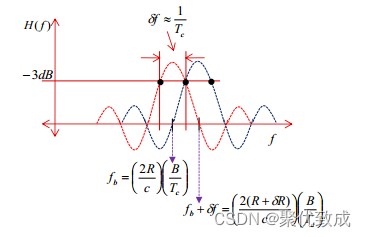
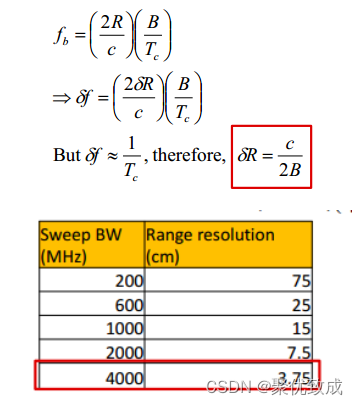
fb和fb+δf是两个目标的中频频率,其实距离分辨率就是求得图中的δf,推导过程如下所示,总得来说,其实距离分辨率就是一个RF(射频带宽B)的函数,大家可以自己求一下看看是不是表中的这个情况。
C是光度;B是射频带宽;
而距离精度通常是距离分辨率的一小部分,它跟SNR信噪比有关。公式如下:
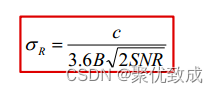
4、最大速度
在快速调频连续波(FMCW)调制中的最大无模糊速度取决于线性调制周期——更高的速度需要更陡的斜坡。最大速度的公式如下,λ是波长,Tc是chirp持续时间(包含chirp间时间):
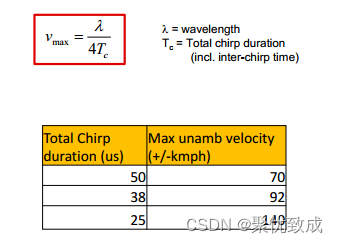
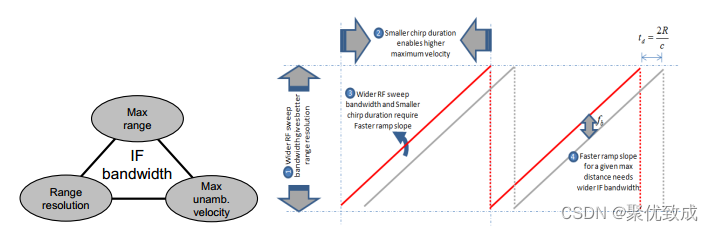
对于给定的最大距离和距离分辨率,较高的最大速度需要较高的中频带宽。三者关系如下所示,这三个参数是相互矛盾的关系。距离分辨率要高,那带宽就要大,但是带宽变大,最大距离就会受到限制,如果调频斜率不变,带宽变大会引起调频周期变长,引起最大不模糊速度降低。
高级的算法技术通常用于增加最大速度不模糊度,用于将混叠速度解析为真实的速度。速度模糊就是速度混叠,原因就是速度采样率太低,也就是Tc的时间太长。
5、速度分辨率与速度精度
速度分辨率与速度精度的区别和距离分辨率与距离精度一样,速度分辨率是在速度维能够区分两个目标的能力,而速度精度是一个目标在速度上的测量精度。前面我们知道距离分辨率取决于RF的带宽,距离精度取决于SNR。那么速度分辨率和速度精度由什么来决定的呢?我们接着往下看。
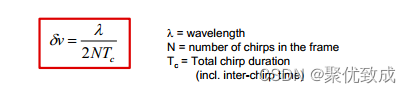
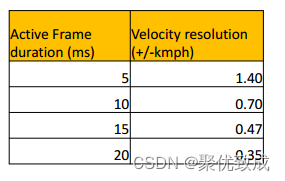
N为一帧中chirp的数量,Tc上面也提到过是chirp周期(包含帧间时间)。由因为帧周期=N*Tc。那么速度分辨率主要取决于谁就能一眼看出来(速度分辨率与帧时间成反比)。
然后我们看一下速度精度的公式:
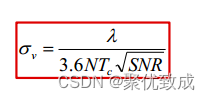
它其实和距离分辨率一样也是取决于SNR ,同样速度精度通常也是速度分辨率的一部分。另外给出一个速度分辨率和帧周期的表格。大家可以按照这个计算一下练练手。
6、角度分辨率
其实除了角度分辨率外,还有一个角度范围(FOV),但这个跟天线有关系。
同样角度分辨率与速度、距离分辨率一样,都是将至少两个目标区分开。只不过角度分辨率是通过角度来区分的。
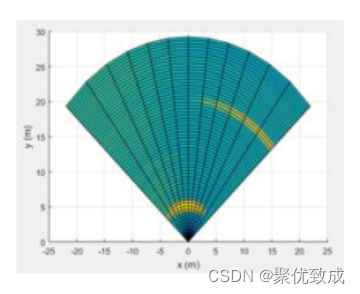
雷达传感器与激光雷达相比,角度分辨率很差。那为啥要用它呢?原因是在距离和速度方向上有很好的分辨率。下面我们给出一个K 个阵列的角分辨率(以弧度为单位)的公式:

从公式可以看出来,当θ=0时,分辨率是最佳的,可以从下面的图中直观的看出,角度越大,分辨单元就越大。
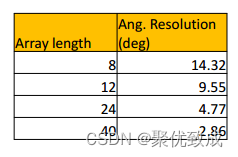
通常我们在计算角度分辨率的时候会假设d=λ/2,θ=0.所以我们通常意义上的角度分辨率计算都是通过这个公式得到的:

同样给出一个角度分辨率和阵列个数的表格供大家参考。
这篇关于汽车电子 -- 毫米波雷达的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!