机载专题
1553B总线接口仿真卡,1553B IP核,适用于航空机载,飞机综合航电等领域
1553B总线接口卡可作为通讯或仿真测试板卡使用,支持USB,PCI,PXI,CPCI,以太网,RS422,RS485等计算机总线平台,单功能(1个BC、0-31个RT和1个BM,当前仅可单工作模式)、多功能(1个BC、0-31个RT和1个BM,当前可多工作模式),单通道、双通道、三通道、四通道选择,通讯速率支持标准1Mbps,以及4Mbps,-40℃~+85℃工业级工作温度设计,功能丰富,使用方
以23年电赛吉林赛区为例,如何避免冤假错案?再谈无人机赛题中不让使用机载计算机的问题!!!
有同学反馈吉林赛区在无人机赛题中使用树莓派后不被允许测评,由于缺少同省样本支撑,并且吉林省G题无人机获得国奖仅有一组,所以仅根据特定情况做回复,不代表任何组委会立场,因为按照该用户表述,自己没有任何其他的违规行为,仅仅是因为使用了树莓派不让测试? 无名小哥回复:别的省英特尔nuc12/13 i5/i7都能用(典型的迷你PC主机,存在及大的擦边球嫌疑),测评还能进国测,如果没有其它违规

【论文解读】空中机器人利用机载电脑感知计算躲避动态小障碍物
标题:Avoiding dynamic small obstacles with onboard sensing and computating on aerial robots 作者:Fanze Kong, Wei Xu, Fu Zhang 来源:https://arxiv.org/abs/2103.00406 代码:https://github.com/hku-mars/dyn_small_

机载激光雷达标定板提高测量精度
机载激光雷达系统标定板(LiDAR)是一种高精度的遥感技术,它通过发射激光脉冲并接收反射回来的光波来测量目标物体的距离。这种技术在测量地形、建筑物、植被等方面有着广泛的应用。为了确保机载激光雷达系统的数据准确性和可靠性,需要使用标定板进行校准和验证。 机载激光雷达标定板通过精确校准激光雷达系统的参数来提高其测量精度。机载激光雷达系统通过发射激光脉冲并接收反射回来的光波来测量目标物体的距离和形
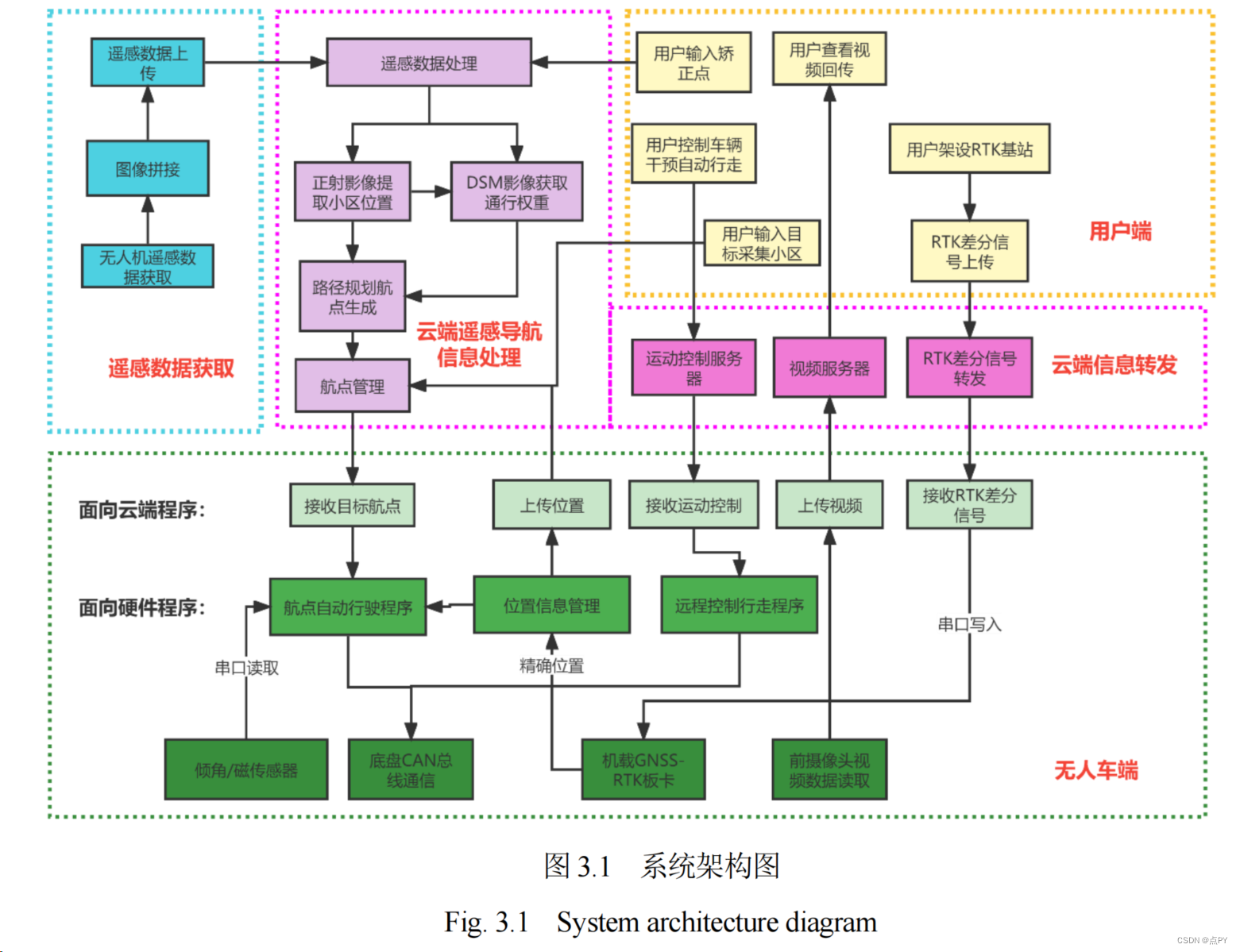
星载/机载遥感导航论文合集
文章目录 2022基于 GPS 遥感影像技术的花椒采摘机器人智能导航及轨迹规划的研究[M]基于无人机遥感的育种田间无人车导航系统研究[M] 2022 基于 GPS 遥感影像技术的花椒采摘机器人智能导航及轨迹规划的研究[M] 摘要:随着智慧农业的推进和移动机器人的快速发展,如何借助机器人解决当前农业生产发展中遇见的困难是当前农业机器人研究的热点。本文研究的花椒采摘机器人就是围绕
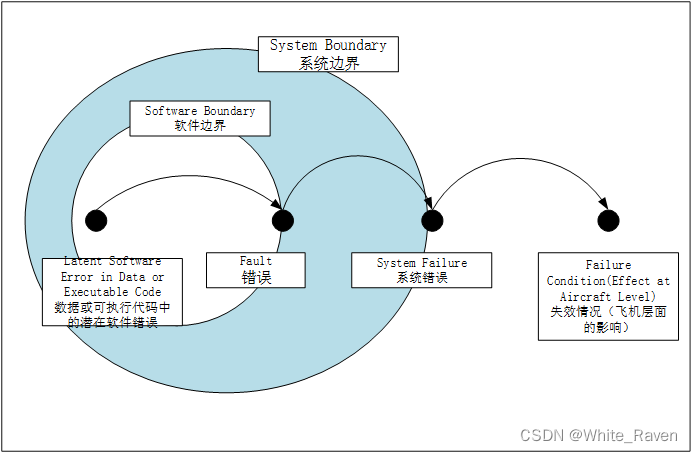
RTCA DO-178C 机载系统和设备认证中的软件注意事项-软件开发的系统相关性(二)
2.0 软件开发的系统相关性 SYSTEM ASPECTS RELATING TO SOFTWARE DEVELOPMENT 本节讨论了解软件生命周期过程所需的系统生命周期过程的那些方面。 系统生命周期流程可以在其他行业文档中找到(例如,SAE ARP4754A)。 This section discusses those aspects of the system life cycle pr
ardupilot开发 --- 机载(边缘)计算机-VISP 篇
啊啊啊我的妻王氏宝钏 1. 一些概念2. 支持的硬件3. 支持的第三方库4. 安装4.1 快速安装VISP4.2 第三方库的(可选)安装 5. 下载测试数据6. tips7. 如何在应用程序中使用(引用)VISP?8. 帮助文档8.1 基本的矩阵向量运算8.2 图像操作8.2.1 在图像显示窗口绘制图像8.2.2 在图像显示窗口加载、显示、绘制图像8.2.2 无显示窗口的情况下在图像上添加基
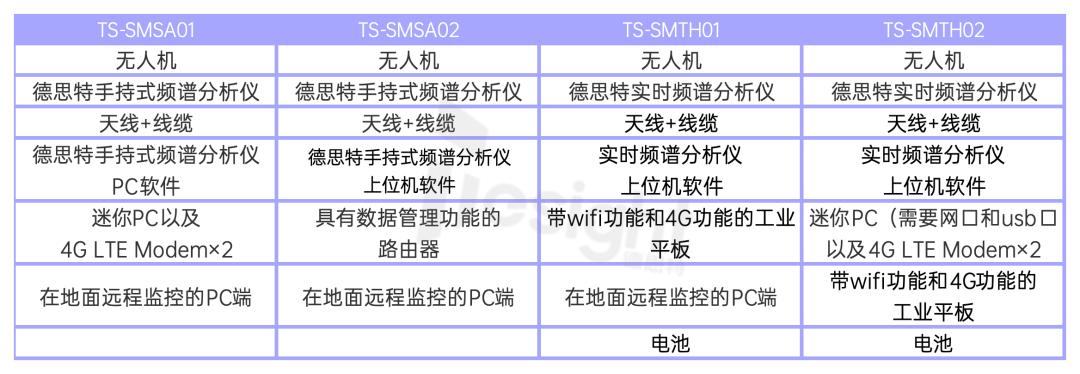
无人机机载频谱监测方案助力空中频谱监测与干扰排查
作者介绍 一、方案背景 频谱资源是通信最重要的资产之一,随着宽带无线业务的快速增长,对频率资源的需求大幅增加。未来频率资源的供需矛盾将非常突出,空中频谱环境也会越来越复杂,对于工程师来说,在复杂的电磁环境条件下,进行空中频谱监测与干扰排查,是一个很大的挑战! 二、方案需求分析 ➢ 复杂的频谱环境中,需要测量不同频率范围 ➢ 复杂的基站环境,需要方向性强的天线 ➢ 复杂的

【读论文】2018-机载LiDAR 点云数据降维与分类的随机森林方法
摘要 考虑到现有的点云分类算法在提取依赖结构的特征参数时面临邻域尺度的选择难、数据维度高、计算复杂,并且缺乏对分类特征参数的重要性评估和选择等问题。 选取了归一化高度、高度统计量、表面特征、空间分布特征、回波特性、强度特征6大类特征参数,并构建多尺度特征参数使用随机森林的特征选择算法对分类特征进行优化,然后进行点云分类 实验表明,归一化高度特征在点云分类中所起作用最大 归一化高度 基于布

Matlab 一种基于机载LiDAR点云电力线自动提取方法之二
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 之前的方法在面对地面为水面时,由于地面点的缺失会导致电力线提取错误,因此这里使用CSF地面点滤波改进电力线的提取过程。关于CSF滤波的相关配置可以详看:Matlab CSF地面点滤波(插件),改进之后的代码如下所示。 二、实现代码 %% ********
MAVROS与机载电脑Jetson nano通信
简介:MAVROS和Jetson nano通信,设置飞控参数和MAVROS文件,实现飞控和机载电脑的通信。MAVROS相当于PX4飞控中的MAVLINK模块。MAVROS将话题转为MAVLINK格式消息发送给飞控,飞控中的MAVLINK模块将MAVLINK格式消息转化为uORB消息给PX4各模块间传递消息使用,也可以反过来从uORB消息一直到ROS话题。 MAVROS简介 ROS结合PX4
超维空间M1无人机使用说明书——01、ROS机载电脑使用说明——远程连接
引言:远程连接通常采用两种方式,一种是通过可视化软件,如VNC、Nomachine等,另外一种是使用SSH。各有优缺点,两种远程登录方式的优缺点做一个简单的对比: 1、SSH优缺点 优点:1、消耗网络资源 2、运行稳定 缺点:1、图形化界面卡顿 2、对新手不友好 2、可视化软件优缺点 优点:1、对新手友好 2、运图形化界面比ssh流畅 缺点:1、消耗网络资源 基于以上考虑,我们默认都
超维空间M1无人机使用说明书——01、ROS机载电脑使用说明——远程连接
引言:远程连接通常采用两种方式,一种是通过可视化软件,如VNC、Nomachine等,另外一种是使用SSH。各有优缺点,两种远程登录方式的优缺点做一个简单的对比: 1、SSH优缺点 优点:1、消耗网络资源 2、运行稳定 缺点:1、图形化界面卡顿 2、对新手不友好 2、可视化软件优缺点 优点:1、对新手友好 2、运图形化界面比ssh流畅 缺点:1、消耗网络资源 基于以上考虑,我们默认都
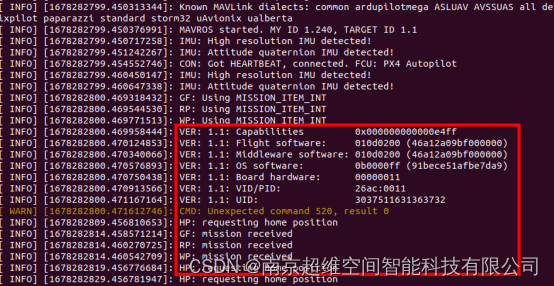
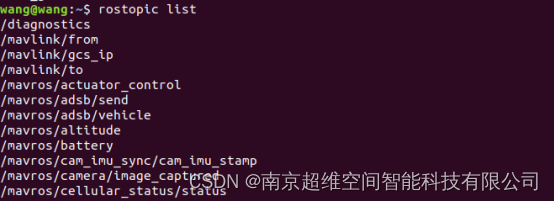
【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是必须和我的一致,也可以是ubantu18.04与ros melodic 在机载电脑上安装ubantu20.04(ros必备运行环境) 安装ros noetic(mavros必备运行环
【无人机学习篇】构建mavros机载电脑连接,从机载电脑获取pixhawk数据
(本文基于的pixhawk版本:6X minibase V2.2 ,固件:apm) 整个的步骤(baseline): 具体的每一步都可以在网上查到教程,这里只是梳理出一个流程。并且ubantu与ros的版本也不是必须和我的一致,也可以是ubantu18.04与ros melodic 在机载电脑上安装ubantu20.04(ros必备运行环境) 安装ros noetic(mavros必备运行环
《文献翻译》Part3 基于地形分割渐进加密的机载LiDAR点云滤波
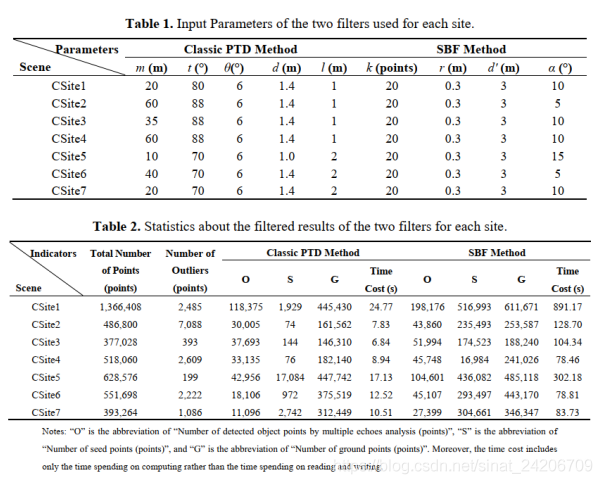
基于地形分割渐进加密的机载LiDAR点云滤波 林相国 *和张继贤 中国测绘科学研究院空间测绘重点实验室,北京莲花池西路28号,北京100830 摘要: 滤波是机载激光扫描(ALS)点云的核心后处理步骤之一。本文提出了一种基于分割的滤波(SBF)方法。该方法包括三个关键步骤:点云分割,多次回波分析和迭代判断。此外,第三步是我们的主要贡献。特别地,迭代判断基于经典渐进TIN(三角不规则网络)致密化(
《文献翻译》Part3 基于地形分割渐进加密的机载LiDAR点云滤波
基于地形分割渐进加密的机载LiDAR点云滤波 林相国 *和张继贤 中国测绘科学研究院空间测绘重点实验室,北京莲花池西路28号,北京100830 摘要: 滤波是机载激光扫描(ALS)点云的核心后处理步骤之一。本文提出了一种基于分割的滤波(SBF)方法。该方法包括三个关键步骤:点云分割,多次回波分析和迭代判断。此外,第三步是我们的主要贡献。特别地,迭代判断基于经典渐进TIN(三角不规则网络)致密化(
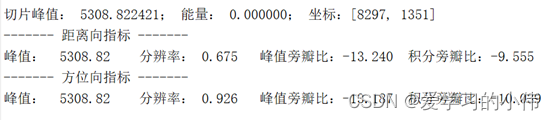
SAR成像处理算法_RD算法_机载1m分辨率仿真单点目标
为了验证RD算法的有效性,在机载正侧视模型下,仿真一个分辨率为1m的点目标,成像后测试聚焦指标。仿真点目标参数如下所示。 ---------------仿真数据参数---------------回波尺寸[Na x Nr]:16592 x 2680雷达参数:信号波长:0.0500 m信号带宽:200.0000 MHz信号脉宽:10.0000 us信号调频率:2000000000