本文主要是介绍星载/机载遥感导航论文合集,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 2022
- 基于 GPS 遥感影像技术的花椒采摘机器人智能导航及轨迹规划的研究[M]
- 基于无人机遥感的育种田间无人车导航系统研究[M]
2022
基于 GPS 遥感影像技术的花椒采摘机器人智能导航及轨迹规划的研究[M]
摘要:随着智慧农业的推进和移动机器人的快速发展,如何借助机器人解决当前农业生产发展中遇见的困难是当前农业机器人研究的热点。本文研究的花椒采摘机器人就是围绕目前人工采摘中出现的采摘效率低、采摘困难等问题。针对花椒采摘机器人自主导航与轨迹规划问题展开研究。从花椒林辨识出发,获取花椒树环境信息,确定花椒采摘树干的位置,并综合考虑路径长短和安全等几个方面问题,进行花椒采摘机器人移动小车目标路径规划,搭建实验平台,模拟采摘环境,实现花椒采摘机器人自主导航及轨迹控制。
(1)基于 GPS 遥感影像花椒林信息提取。对比传统的林地信息提取方法,首先通过 GPS 实现对花椒林物体空间的定位和范围边界的确定,再结合高分辨率的遥感影像数据,对花椒信息的提取更快捷、方便、高效。然后采用 ENVI 中基于图像的面向对象分类法,实现对花椒林的信息提取,并提取出了花椒树冠;通过将树冠信息进行矢量转化导入 ArcGIS 中并进行要素转换得到花椒树干的质心点,将提取的质心位置与 WGS-84 坐标系结合得到了花椒林树干坐标并与GPS 地图结合,为移动小车提供了路径规划目标。
(2)花椒采摘机器人移动小车静态环境采摘路径规划。针对花椒林中多花椒树静态环境,提出改进的蚁群算法进行花椒采摘机器人移动小车全局静态环境下的路径规划。蚁群算法在初始时刻具有盲目搜索的缺陷,对此建立了信息素的非均匀分布模型;对于路径节点的选择,增加了一定的随机性概率,减少确定性的概率,增加搜索的多样性;针对蚁群算法在移动过程中的节点选取,以当前局部节点为参考的策略,引入当前节点、下一节点及终点的关系,从全局的角度出发来节省搜索的路径长度,提高规划效率,并通过将势场法中的力引入启发因子中,提升了规划路径的安全度,避免与障碍物发生碰撞;为了提升小车行驶过程中的平稳性、安全性,引入路径平滑策略和冗余点去除策略,冗余点去除以减少拐点和缩短路径为目标,路径的平滑以增加行驶的平稳性、稳定性为目标。
(3)花椒采摘机器人移动小车动态环境采摘路径规划。针对花椒林实际环境中存在的不确定性,尤其是未知障碍物与动态障碍物的出现造成的小车碰撞,提出了融合动态窗口法和改进蚁群算法的花椒采摘机器人移动小车动态路径规划。根据本文提出的集成算法路径规划,首先花椒采摘机器人移动小车依据全局静态环境下规划的路径进行跟踪,在向前移动的过程中移动小车携带的传感器不断对局部的环境进行实时更新,当遇见突发障碍物时,移动小车通过进行局部的路径规划,避免了与障碍物发生碰撞,在完成后局部路径规划后调整小车位姿继续按照原路径行驶,这样通过全局路径与局部路径的结合,实现了动态环境下的小车路径规划并安全到达目标采摘位置。
(4)搭载实验平台对花椒采摘机器人实现自主导航及轨迹规划进行实验研究。设计搭建花椒采摘机器人移动小车,选配控制硬件,设定实验环境,将小车放置在实验环境中,对花椒树采摘位置进行定位,模拟了静态环境和动态环境下的小车路径规划,验证轨迹规划的可行性。

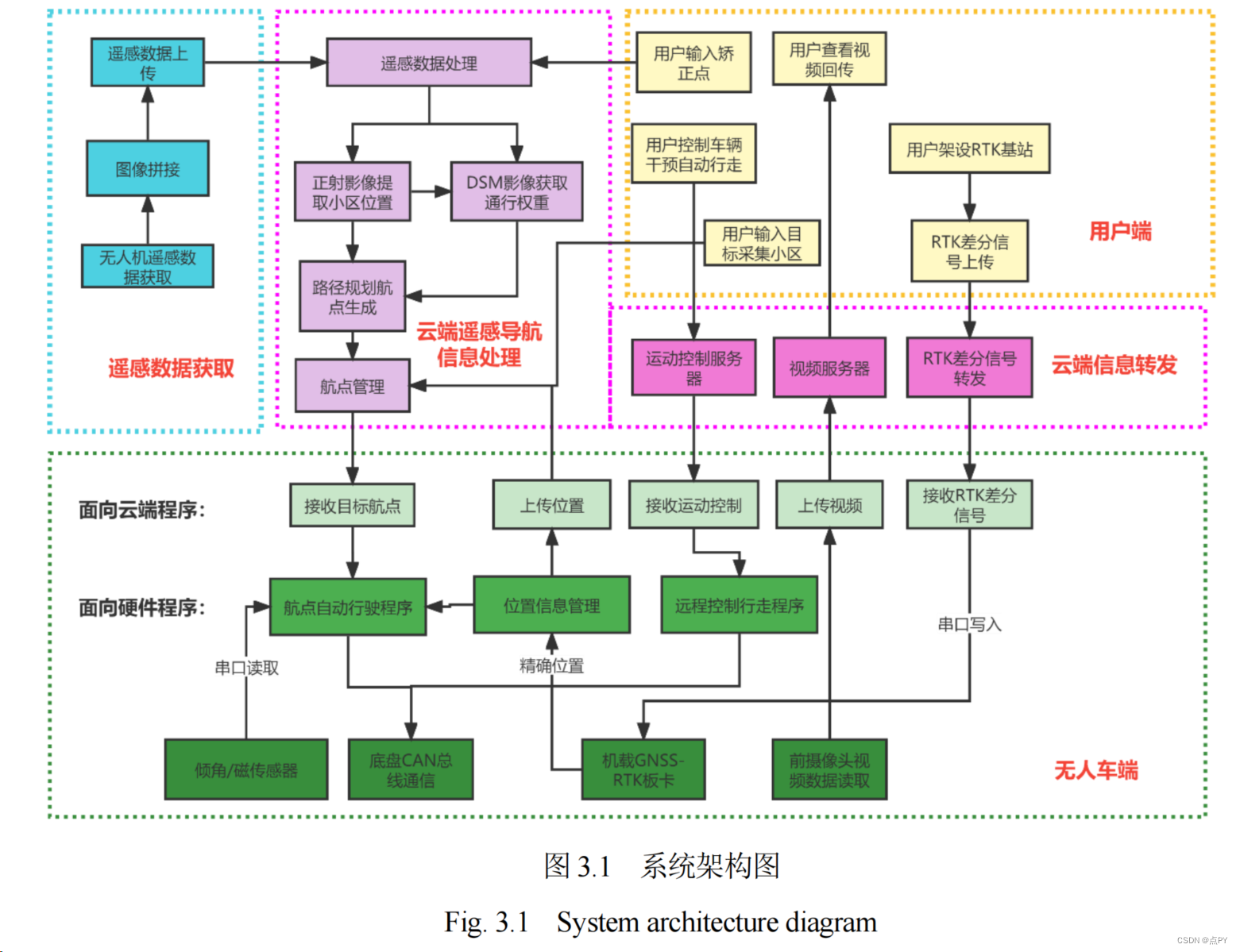
基于无人机遥感的育种田间无人车导航系统研究[M]
摘要:采用现有无人车导航系统进行农作物育种表型信息的监测与采集时,存在因育种小区数量较多导致的导航目标点人工测量工作量大的问题,且育种田块不同于大田作物以A-B 线为基线的路径规划方法,无人车需要根据育种材料编号自动行进到某一指定位置进行作物表型信息采集。因此,为提高导航效率和降低人工劳动强度,本文基于无人机遥感对无人车的导航系统进行了研究。
通过无人机获取玉米育种田的遥感影像并进行拼接和位置矫正,生成正射影像和数字地表模型(Digital Surface Model,DSM)。基于图像的仿射变换原理,截取并矫正了育种田的图像感兴趣区域范围,感兴趣区域的颜色空间在转换到 HSV 后,基于能量函数法和 Savitzky-Golay 滤波器获取田块的粗略位置,在此基础上,利用能量函数法获取精确的田块位置,小区获取的分割精度中平均重叠度(Intersection over Union,IoU)为95.17%,最高为 99.8%,最低为 87.8%;在提取到精确田块位置的基础上提取育种田间可通行区域,通过模拟无人车在田间行走的过程设计了理论横滚角计算算法,并将每段道路计算了通行权重,最后使用 Dijkstra 算法进行了路径规划,在实地试验中测试了陀螺仪获取和理论计算的横滚角,两种数据的变化趋势相同,验证了基于 DSM 的路况计算算法的有效性。
设计了基于无人机遥感的无人车导航系统软硬件系统架构,利用单天线 RTK-GNSS和电子罗盘计算了航向角,利用陀螺仪获取车辆横滚角消除定位横向误差;基于横向偏移误差和航向角度误差,使用 PID 算法调控底盘行走,建立了前端交互网页和远程视频回传系统。为了验证基于无人机遥感的导航系统导航精度,在试验田中进行了实际试验,对比测试了手动遥控行驶和自动行驶的区别,自动驾驶最大横向误差为 24.41cm,均方根(Root Mean Square,RMS)为 6.18cm,相比于手动导航(最大误差为 32.51cm,RMS为 12.79cm),自动导航有更好的横向误差稳定性。通过遥感图像选择导航点进行车辆田间自动导航,验证了无人机遥感图像的位置精度,证明无人机遥感图像用于无人车田间导航的可行性;测试了无人车在试验范围内所有路径不同可通行区域行驶时的通行权
重和,其理论值和实际值的最小值均为同一条路径,证明了基于 DSM 的路径规划算法的有效性。解决了无人车在育种田间自动航点行走和人工交互等控制问题。
这篇关于星载/机载遥感导航论文合集的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








