本文主要是介绍《文献翻译》Part3 基于地形分割渐进加密的机载LiDAR点云滤波,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
基于地形分割渐进加密的机载LiDAR点云滤波
林相国 *和张继贤
中国测绘科学研究院空间测绘重点实验室,北京莲花池西路28号,北京100830
摘要:
滤波是机载激光扫描(ALS)点云的核心后处理步骤之一。本文提出了一种基于分割的滤波(SBF)方法。该方法包括三个关键步骤:点云分割,多次回波分析和迭代判断。此外,第三步是我们的主要贡献。特别地,迭代判断基于经典渐进TIN(三角不规则网络)致密化(PTD)方法的框架,但是基本处理单元是一个分割块而不是单个点。ISPRS III / 3工作组提供了七个基准数据集,以测试SBF算法和经典PTD方法。实验结果表明,与PTD方法相比,SBF方法能够保留景观的不连续性,并去除附着在地面上的大型物体的下部。结果,SBF方法能够分别将遗漏错误和总错误减少18.26%和11.47%,这将大大降低后处理所需的手动操作成本。
关键字: 机载激光雷达 滤波 点云分割 进行性TIN致密化; 基于对象的点云分析
1.简介
机载LiDAR(激光检测和测距),也称为机载激光扫描(ALS),是一种广泛使用的技术,用于捕获地球地面及其表面上物体的3D几何形状[ 1 ]。目前,ALS具有多种类型的应用程序,从数字地形模型的重建(DTM; [ 2,3 ]),3D建筑物模型[ 4 - 7 ]和三维道路模型[ 8 ]至检测个体树冠的[ 9,10 ]树高度和其他林分参数[估计,测量11,12 ],液压应用[ 13,14],电力线重建,基础设施映射[ 15 ] 等。在大多数ALS应用中,滤波是确定哪些LiDAR返回来自地面以及哪些来自非地面物体的必要步骤[ 16 ]。
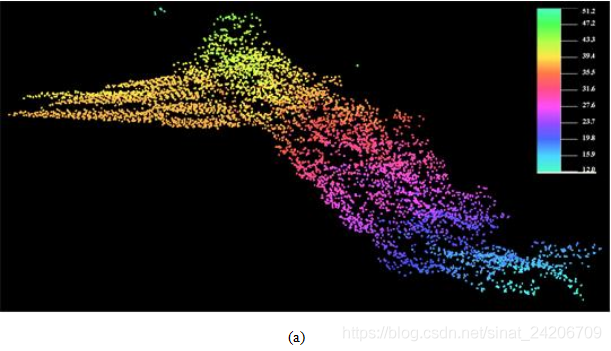
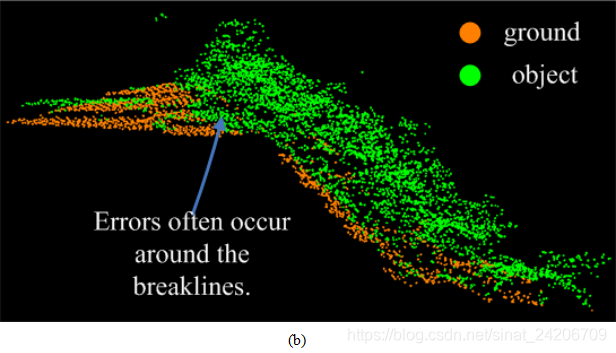
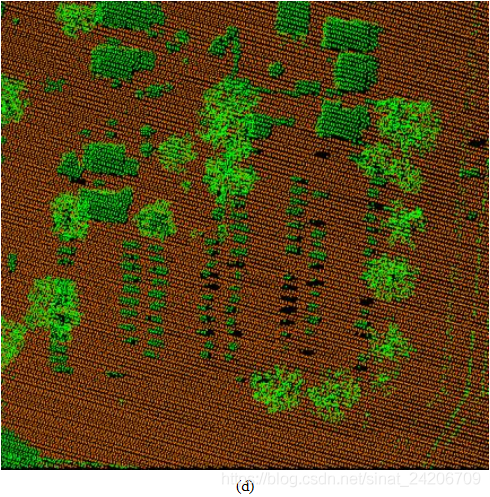
Sithole和Vosselman [ 17 ] 提出了对8种滤波器算法性能的实验比较。他们得出结论,基于表面的滤波器通常会在滤波器策略方面产生更好的结果,因为它们比其他滤波器策略使用更多的上下文。在基于表面的滤波方法中,渐进式TIN(三角不规则网络)致密化(PTD)已广泛应用于科学界和工程应用中,因为它已集成到商业软件TerraSolid中。但是,裸露的地面(参见图1a)和附着在地面上的低矮物体(参见图1c)间断)也给经典的PTD方法带来了很大的挑战。它通常无法检测到断裂线和台阶边缘上的地形点,并且将对象的下部误认为是地面的,分别如图1b,d所示。

为了克服上述缺点,Tóvári和Pfeifer [ 18 ]基于Kraus和Pfeifer [ 19 ] 的方法提出了一种基于分割的鲁棒内插滤波器。他们首先对原始点云进行了分割,然后针对每个分割块而不是每个点计算了残差。根据残差,在稳健插值中将一个段中的所有点分配给相同的权重。[ 18 ]中的实验表明,在城市和森林地区,基于分割的方法和基于地面的方法的组合是有前途的和强大的,这可能归因于以下三个因素:
(1)在点云分割之后,线段能够精确地达到折断线或跳跃边缘;
(2)可以使用显式表面模型。用专用模型描述预期的地形表面可以将地形特征包括在滤波过程中[ 18 ];
(3)基于表面的方法在林区非常有用。
总而言之,尽管已开发出许多方法来解决滤波问题,但到目前为止尚未完全解决。但是,赫顿和火盆[ 14]强调滤波和插值中的错误将影响后续使用-例如在水力模型中使用地形,或在生物量计算中估算植被高度。在本文中,我们提出了一种基于分割的滤波(SBF)方法(请参阅第3节),该方法结合了点云分割方法和经典PTD的框架。我们的滤波方法:第一步是对点云进行点云分割(请参阅第3.2节)。第二步,进行多次回波分析以去除植被测量值(请参见第3.3节)。最后,根据经典PDT方法的原理,将片段分为地面片段或对象片段(请参见第3.1节)。
2.以前的工作
到目前为止,已经提出了许多滤波方法。根据滤波器的概念,Sithole和Vosselman [ 17 ]将现有的滤波方法分为四类,即基于斜率,基于表面,聚类/分割和最小块算法。并且这一类别在今天仍然可行。其中,前三类滤波方法更为流行,现将其概述如下。
(1)在基于坡度的方法中,将测量两点之间的坡度或高度差。这些算法的基本原理是景观中最陡的坡度属于物体,而地形具有一定的最大坡度。因此,如果斜率高于某个阈值,则假定最高点属于非地形对象。Vosselman进行了基于斜率滤波的开创性工作[ 20 ]。基于斜率的滤波器的某些扩展和变体集中在结构元素的形状[ 21 ],自适应斜率参数的确定[ 22 ]以及去除非常大的建筑物的拓扑分析[ 10]上。]。当对象点和地形点均等混合时,基于坡度的方法通常效果很好。但是,如果不满足此要求,则会遇到典型的滤波器错误。
(2)在基于表面的方法中,基本思想是创建一个在其上具有相应缓冲区的参数化曲面,该曲面位于缓冲区上,并且与之前一样,缓冲区在3D空间中定义了预期存在接地点的区域[ 17 ]。因此,这种方法的核心步骤是创建一个接近裸土的表面[ 23 ]。根据创建的表面的装置,基于表面的滤波方法可进一步分为三个亚类:基于形态的滤波器[ 23,24 ],迭代内插为基础的滤波器[ 19,25,26 ],和基于渐进加密的滤波器[ 27]。阿克塞尔森[ 27]首先将整个点数据集划分为图块,然后选择每个块中的最低点作为初始地面点,最后将识别出的地面点的TIN构造为参考曲面。对于每个三角形,通过使用参考表面调查每个三角形中未分类点的参数来确定一个附加的地面点。参数是到TIN小平面的距离和到节点的角度。如果找到偏移量低于阈值的点,则将其分类为地面点,算法将继续处理下一个三角形。在继续下一次迭代之前,所有地面点都已添加到TIN。通过这种方式,三角剖分逐渐被致密化,直到所有点都被分类为地面或物体。Axelsson的方法称为PTD [3,17 ]。上述基于表面的方法在工程应用中是首选[ 28 ]。
(3)在基于分割的方法中,通常假定对象的分割块位于比地面分割块高的位置。通常,基于分割块的滤波器通常包括两个步骤,第一个步骤是分割,第二个步骤是基于生成的分割块进行滤波。Lohmann [ 29 ]将这些部分的紧凑性和高度差应用于相邻部分,以检测不同类型的区域。李[ 30首先使用区域生长方法从这些点获得平面斑块,然后将这些斑块分组为一组表面簇。假定相连的和连续的表面贴片属于同一物体,并且在地面部分之间通常不存在较大的垂直不连续点。地面群集的选择是基于一个简单的假设,即对象位于地面上方,并且地面群集相对较大。Sithole和Vosselman [ 31 ]比较了不同方向上的相邻分割块高度,并**预定义了一组规则,最后将每个分割块分类为物体或地面**。陈等[ 32 ]假设地面部分是水平的,并且低于相邻的对象部分。严等[ 33 ]还提出了一种基于对象的滤波方法。上面的基于分割块的滤波器通常设计用于在数据中可以找到许多阶梯边缘的市区。这些滤波器的缺点在于,没有像上面的基于表面的方法那样完成预期的地形模型。另外,在林区中可能会产生太多的小段,这将挑战现有的滤波器。
提出的SBF方法是基于表面的PTD方法和基于分割的方法的结合。我们的目标是整合两种方法的优势,以提高滤波精度。
3.方法
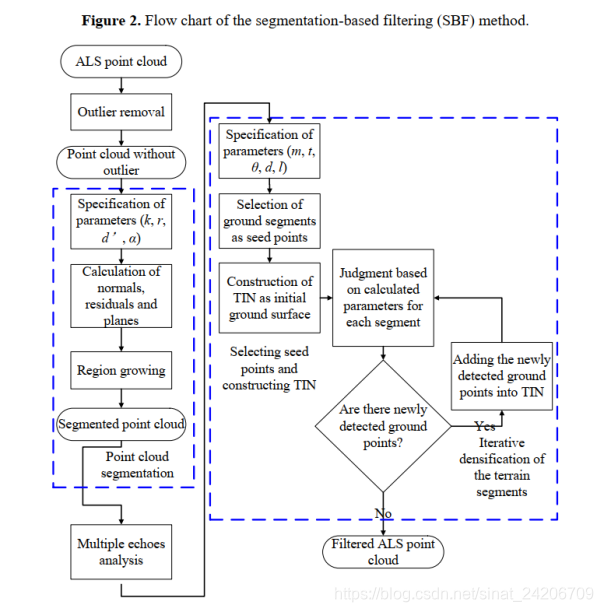
提议的SBF方法包括四个步骤:离群值去除(请参阅第3.1节),点云分割(请参见第3.2节),多回波信息分析(请参见第3.3节)以及地形分割的渐进致密化(请参阅第3.4节),如图2所示。
3.1 离群值去除
许多数据集包含远高于或低于地球表面的测量值,这些测量值称为离群值。离群值是滤波器算法可能会失败的情况之一[ 17 ],特别是对于基于以下假设的滤波器:网格单元中的最低点必须属于地形[ 3]]。我们的SBF方法也对异常值特别是低异常值敏感。但是,自动离群值删除是不可能完成的任务,因为存在各种类型的错误,例如低离群值,高离群值,孤立离群值和聚类离群值。因此,需要人类的参与。这里,设计了三个子步骤以消除异常值。首先,建立高程直方图并通过可视化高程值的分布进行检查,然后由操作员的视觉评估确定高程阈值,以从分布中消除最低和最高的尾巴。其次,使用每个点相对于其所有邻居的最小高度差搜索剩余的离群值。这里是一棵kd树[ 34用]来查询每个点的邻居,并计算平均高程和高程的标准差。从数据集中删除那些比平均高程高出标准偏差三倍的点。第三,手动校正由异常值自动分类产生的错误。
3.2 点云分割
实践表明,可以通过首先分割点云,然后分析分割而不是单个点来加强LiDAR数据的处理[ 35 ]。点云分割是将输入点云划分为相干和连接的点簇的过程[ 36 ]。具体而言,某个几何特征上的点是相干点,例如共面,共面和共线点;而连接点是一组点,其中每个点在一定距离内都具有至少一个相邻点[ 37 ]。机载LiDAR点云分割方法很多,例如区域增长[ 38 ],表面增长[ 39 ]和自适应随机样本共识[ 40]]。但是,它们中的大多数旨在检测平面(例如建筑物屋顶)而不是平滑表面(例如大面积的地面)。在此,采用了Tóvári和Pfeifer的分割方法[ 18 ]。此分割方法基于以下假设:连续且光滑的表面可以聚类为相同的片段。我们将其重命名为点云平滑分割(PCSS)方法 。PCSS由以下两个主要阶段组成。
(1)正态和残差估计。通过将平面拟合到相邻点来估算每个点的法线。因此,将k个最近邻居(KNN)[ 34 ]用于邻居搜索。为了使平面适合一组给定的点,从最小二乘意义上讲,我们需要找到最小化这些点与估计表面的正交距离的平方和的参数。最佳拟合平面是使用主成分分析(PCA)计算得出的,该主成分分析是从最小二乘估计的理论中得出的。PCA是从点云计算平面法线逼近的一种流行方法,有关平面拟合的详细信息,请参见Rabbani [ 41 ]。
(2)具有距离和法向差约束的区域增长。根据用户指定的参数,此阶段利用上面计算的法线将属于平滑表面的点聚类。区域增长的过程按以下步骤进行:
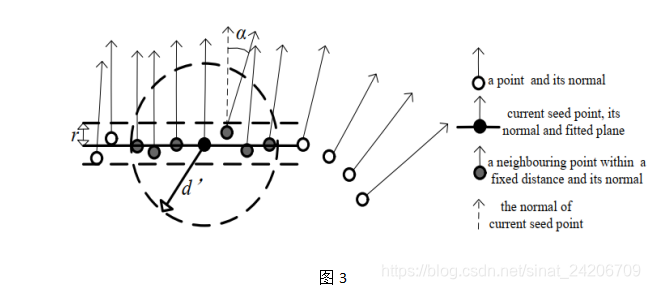
①根据距离输入两个平滑度阈值。第一阈值是相邻点到当前拟合平面的垂直距离(点到拟合面的垂直距离),表示为r。第二阈值是当前点和邻域点之间的3D距离(邻域搜索半径),表示为d’。
②根据当前种子的法线与其邻居的法线之间的角度输入平滑度阈值,记为α。将所有点设置为未分割。
③如果所有点都已被分割,请转到步骤⑦。否则,从未标记点中选择残差最小的点作为当前种子,并建立一个空的种子点列表。
④选择当前种子的固定距离相邻点。固定距离邻居(FDN)用于搜索固定距离d’内的相邻点。将与当前种子的角度差小于α且与当前平面的距离小于r的点添加到当前区域;同时,将合格点添加到潜在种子点列表中。
⑤如果潜在种子点列表不为空,则将当前种子设置为下一个可用种子,将当前平面设置为下一个可用种子的平面,然后转到步骤④。
⑥将当前区域添加到分割中,然后转到步骤③,并清除种子点列表。注意,当搜索具有最小残差的点时,应排除标记点的残差。
⑦完成分割任务。
上面的PCSS算法需要四个指定的参数k,r,d’和α(请参见图3)。这些参数应根据经验和景观的复杂性确定。PCSS的一些示例显示在图4b,5c和6c中。由图可知,分割后,地表被分为许多优势簇,物体也被分为许多簇。此外,大多数群集包含地面或对象点的明显多数,而几乎没有任何混合群集。特别地,尽管地形群被折断线穿过,但是地形群可能在斜坡不连续的两侧都包含点。
3.3 多重回声信息分析
当前,多脉冲机载激光雷达系统能够记录单次回波/回波和多次回波[ 42 ]。实践表明,在每个段中的多个返回的比例是一个很好的特征来区分地面测量[植被测量10,32,43,44 ]。如上所述,植被可能会产生多重回声。实验表明,属于树的段包含很少的点,其中多个收益所占比例超过50%[ 43 ],如图5d和6d所示。同时,属于建筑物的部分包含大量点,其中奇异收益所占比例超过90%[ 44 ]。回波比还用于全波形机载LiDAR数据中的植被分类[ 45 ]。因此,关于多个回波的比例的特征也是有益的。因此,如果一个段中多个回波的比例大于50%,则该段内的点将被标记为植被类别,并且禁止对其进行后续的划分。
3.4 地形段的逐步致密化
此步骤类似于PTD滤波器的进度,但是基本处理单元是一个段而不是单个点(如图4c所示)。
它由以下五个步骤组成。
(1)指定参数。共有五个关键参数[ 3 ]预设,包括:
①最大建筑面积,m。m是长度阈值,算法可以处理长度不超过此值的建筑物。它用于定义栅格像元的大小,并且栅格像元是点云的图块(请参见步骤(2))。
②最大地形角,t。t是斜率阈值,它决定如何执行未分类点的判断(是否镜像)。如果TIN中三角形的斜率大于t,则应通过相应的镜像点来判断位于该三角形内部的任何未分类/潜在点。镜像的想法来自[ 27 ]。在步骤(3)-④中提供了更多详细信息,如图4f所示。
③最大角度θ。θ是三角形平面与连接电位点和最近的三角形顶点的线之间的最大角度。如果未分类的点的角度大于θ,则将其标记为对象测量,否则标记为地面测量。
④最大距离,d。d是一次迭代过程中从点到三角形平面的最大正交距离。如果未分类的点的距离大于d,则将其标记为对象度量,否则标记为地面度量。
⑤最小边长l。l是TIN中任何三角形的最大(水平投影)边缘长度的最小阈值。l用于减少当三角形的每个边短于l时向三角形内的地面添加新点的渴望。注意l是在水平面中测量的。因此,引入l有助于避免向地面模型添加不必要的点并减少存储器需求。
请注意,经典PTD滤波器还需要预设相同的五个参数。
(2) 选择种子地形段并构建初始TIN
确定给定点云数据集的边界框,并固定左上角(x topleft,y topleft),右下角(x bottomright,y tbottomright),宽度w和高度h。数据集的整个区域按行和列分为几个图块(或网格单元)。行数和列数由以下公式确定:

(1)其中n Row是行中的瓦片数,n Column是列中的瓦片数,m是上述有关最大建筑物大小的参数,ceil(x)是用于返回不小于的最小整数值的函数X。将每个图块中具有最低点的线段视为地形线段,并将属于地形线段的点选为数据集的种子点。请注意,种子点没有重复。这意味着,如果几个图块中的最低点属于同一段,则属于同一段的点应仅添加到种子点一次,如图4c,d所示。另外,应该将边界框上的四个角添加到种子点,如图4c,d所示。而且,每个角的高度等于其在水平面上的最接近种子点。最后,基于种子点构建TIN,如图4d所示,它代表初始地形模型。注意,插入四个角可确保点云数据集中的任何点都位于TIN内。构造TIN之后,除种子点之外的其余点都被标记为默认对象测量值。
(3)标识
判断以分割的方式执行。换句话说,属于同一段的潜在点被整体上判断。详细地,将除地形部分以外的所有部分设置为未处理状态。找到一个未处理的线段,并将线段内的点标记为对象测量值。随后,对分割块中的每个潜在点进行如下判断:
①找到潜在候选种子点P,P(x p,y p,z p)。找到三角形T 三角形,其中P 电位在其顶点之内或边缘或上方。
②计算的三角形平面,S的斜率三角形。如果S 三角形不大于地形角t,则转到③。否则,转到④。
③计算以下两个参数,A 角和D 距离,如图4e所示。第一个是T 三角形与连接P 电位和最近的三角形顶点的线之间的角度,表示为A angle。第二个是从P 电位到T 三角形的距离,表示为D 距离。如果同时出现以下两种情况:
- 夹角 ≤ θ
- 距离 ≤ d
保持,将潜在候选种子点P标记为地面测量值(地面点),然后判断下一点。否则,转到下一个点。
④镜像点,如图4f所示。在Ttriangle中找到高度值最高的顶点,记为Pvertex(x v,y v,z v)。镜像点如下:

(2)其中(x mirror,y mirror,z mirror)是镜像点的3D坐标。找到镜像点,并按照③中的方法计算角度和距离参数。如果将镜像点确定为接地点,则将P点标记为接地测量,然后转到下一个点的判断。
如果已经判断出当前线段中的所有点,则将线段设置为已处理状态,并计算地面点的数量和对象点的数量。如果地面测量的数量大于对象测量的数量,则将当前线段内的所有点标记为地面测量。否则,再次将它们标记为对象测量值,然后判断下一个未处理的段。但是,如果所有段都已处理并标记,请转到步骤(4)。
Figure 4. The progress of SBF method and some needed parameters. (a) A point cloud;(b) Result of point cloud segmentation; © Selection of ground seed segments;
(d) Construction of TIN by the points in ©; (e) Measurement of angle and distance;
(f) Mirroring process.

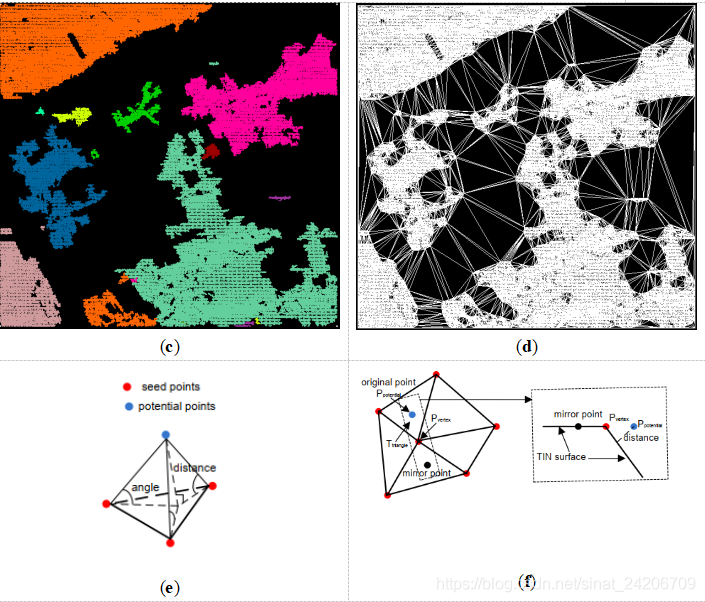
(4)新检测到的地形段将添加到TIN中,如下所示:
① 逐一找到每个地形段的接地点P ground(x g,y g,z g)。找到的三角形,T” 三角形,其在P 地面是内部或上边缘或上的顶点。
②计算T’ 三角形各边在水平面的长度。如果任意边的长度大于l,则将P 地线添加到TIN中。否则,请判断下一个新检测到的接地点。
(5)重复(3)和(4),直到不再将其他线段添加到地形线段集合中为止。
4.实验与性能评估
在Windows XP操作系统下,使用VC ++ 6.0 IDE开发了用于ALS数据滤波的原型软件系统。我们使用的硬件是Lenovo工作站W520,具有Intel Pentium 2.40 GHz CPU和2.98 GB RAM。经典的PTD方法[ 27 ],PCSS分割方法[ 18 ]和建议的SBF方法已集成到开发的系统中。请注意,我们从头开始实现了PTD和PCSS。此外,该ALS点的三角测量,通过集成现有的实现被称为三角[二维Delaunay三角仪来完成46 ]和KNN通过集成现有的实现kd树的称为ANN [完成47 ]。
4.1 实验数据
使用来自ISPRS第三委员会,第三工作组的基准数据来比较PTD方法和建议的SBF方法的性能。它包括八个由不同地形组成的站点:四个城市站点和四个农村/林木站点,以及15个子区域参考样本。八个数据集分别命名为CSite1-8,如表1所示。测试数据涵盖了各种土地利用和土地覆盖类型,包括建筑物,植被,河流,道路,铁路,桥梁等。这些数据是通过Optech ALTM扫描仪在Vaihingen / Enz测试场和斯图加特市中心获得的。这八个数据集的总体特征参考Sithole和Vosselman [ 17]。城市站点的点间距为1.0到1.5 m,农村站点的点间距为2.0到3.5 m。此外,总共有15个参考样本用于测试滤波精度。参考数据是通过手动滤波生成的,其中包含七个景观的知识和可用的航拍图像[ 17 ]。由于CSite8没有参考数据集,因此将其排除在外以进行进一步的实验和分析。请注意,收集的激光数据具有第一个和最后一个回波/回波,这并不意味着数据中没有单个回波。为了执行多次回波分析,根据以下规则,每个脉冲的原始两次回波被标记为单回波或多次回波:
如果两个回波的强度值不同,则将它们都标记为多个回波;否则,将它们标记为多个回波。
否则,请计算两个回波的3D距离:
▪如果它们的距离大于有经验的阈值0.5 m,则它们也被标记为多次回波。
▪否则,它们都被标记为单个回波。
上述预处理不仅保留了原始数据中的所有点,而且还向数据中添加了更多回波信息。注意,两个滤波器都执行多次回声分析。特别是,如果将点标记为多重回波,并且它也是两者的第一个回波,则在针对PTD滤波器的多重回波分析中将其滤除。
4.2 输入参数的规格
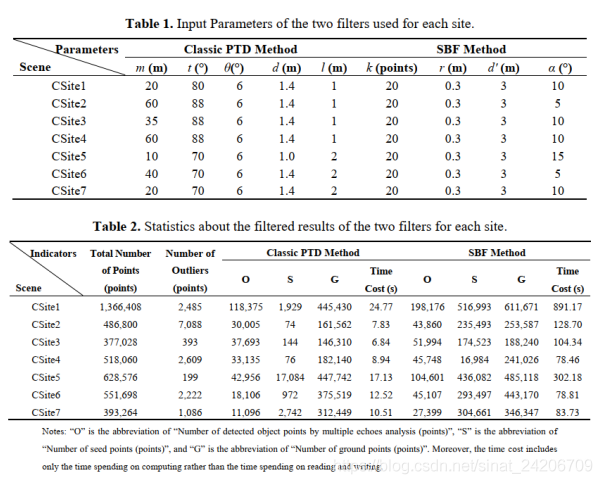
SBF方法与PTD方法共享五个参数,但是比PTD方法需要四个参数。对于七个数据集,两个滤波器的共享五个参数均设置为相同的值,如表1所示。所有参数均取决于作者对景观条件的经验判断。特别是,m比该场景中建筑物的最大长度或宽度稍大。t是该场景中的最大地形坡度;θ和d分别默认设置为6和1.4,它们的最佳值可以通过反复试验法确定。升 略大于点数据集的平均点密度,该平均点密度用于避免TIN中的三角形过多。
表1列出了用于这七个测试数据的所有参数。表2列出了有关输入的七个数据集及其结果的一些关键统计信息,例如原始点数,检测到的离群数等。
4.3 结果
使用表1中指定的参数,我们使用两种方法对七个数据集执行滤波。有关滤波的一些统计信息请参见表2。在滤波结果中,我们选择CSite1和CSite2作为两个代表进行演示,分别如图5和6所示。CSite1和CSite2都在城市区域中被部分或完全覆盖,并且CSite1的顶部包含一座小山,山丘上有复杂的自然景观和人造物体。此外,还显示了样品11,样品24,样品51,样品53,样品71和样品12的结果以反映滤波的细节,如图7所示。和12。
CSite1是城市地区,其特殊功能包括陡峭的斜坡,植被和山坡上的建筑物的混合,山坡上的建筑物以及数据间隙。原始数据中有1,366,408点。2,485个点被识别为异常值,并从两个滤波器的剩余滤波过程中排除,剩余数据和相应的TIN分别显示在图5a,b中。在PTD的滤波过程中,通过多次回波分析检测到118,375个点作为对象测量值;选择1,929点作为地面种子点;最后,将445,430个点归类为地面测量值(请参见图5g)。在SBF方法的滤波过程中,通过多回波分析检测到198,176个点作为对象测量值(请参见图5d);516,993个点被标识为地面测量值(参见图5e);最终,有611,671个测量结果被分类为地面(见图5f)。CSite1上两个滤波器的统计数据表明,与PTD滤波器相比,所提出的SBF方法能够去除67%的物体测量值,检测26,785%的地面种子点,保留37%的地面测量值。图5f,g的差异在图5h中示出。图5h表明,主要差异归因于SBF方法在陡峭地形区域中保留潜在地面测量结果的能力,如图5f–h中的矩形区域所示。图5g显示省略了陡峭区域周围的大多数地面点,而传统的PTD则忽略了穿过陡峭地形的道路下部(请参见图7d)。相比之下,图5f,h表明,通过SBF方法可以很好地保留相同陡峭区域和整条道路周围的地面测量结果。
CSite2也是市区,其特殊功能包括大型建筑物,形状不规则的建筑物,带桥和小隧道的道路以及一些数据空白。原始数据中有973,598点。124点被识别为异常值。图6a,b分别显示了没有异常值的其余数据及其TIN 。在PTD的滤波过程中,通过多次回波分析将30,005个点检测为对象测量值;选择74个点作为地面种子点;最终,检测到161,562个点作为地面测量值(参见图6g)。同样,在SBF方法的滤波过程中,通过多次回波分析可以检测到43,860个点作为目标测量值(见图6d)。); 235,493个点被标识为地面测量值(参见图6e);最终,有253,587个测量值被检测为地面(见图6f)。CSite2上两个滤波器的统计数据表明,SBF提出的方法能够删除46%的对象测量值,检测到326,974%的地面种子点,比PTD滤波器多保留57%的地面测量值。图6f,g的差异在图6h中示出。两种结果之所以不同,是因为SBF方法能够保留某些陡峭街道上的地面测量数据,如图6f–h中的矩形区域所示。图6g显示了经典PTD省略了一些路段。相反,图6f显示,通过SBF方法可以很好地保留所有道路。
此外,参考样品11,样品24,样品51,样品53和样品71的详细结果表明,在以下情况下,与PTD方法相比,SBF方法可以正确检测更多的地面测量值:
陡坡上的植被和建筑物(见图7);
市区的坡道(见图8);
斜坡上的植被(见图9);
自然断裂线引起的不连续性(见图10);
由桥梁(参见图11)或高速公路引起的不连续性。
此外,如图12的椭圆区域所示,SBF方法还比PTD方法能够去除更多的小物体,例如汽车。在点云分割后,同一车辆对应的点往往属于同一段,且该段中的大多数点被判定为非地面类。因此,车辆路段和该路段中的所有点都标记为非地面类别。示例12 [ 17 ]和图12a,b中有很多汽车在样本12上分别显示PTD和SBF方法的滤波结果。与PTD相比,SBF方法的结果是减少了对汽车的测量。但是,在以下情况下,SBF方法无法识别越野对象的测量结果:
如果物体紧密附着在下面的地形表面,则如图6f和11e的椭圆区域所示。
如果物体既小又非常靠近地面,则如图9f所示。
4.4 SBF和PTD之间的性能评估
定性和定量评估均用于评估两个滤波器的性能。特别是,通过视觉比较七个滤波结果和15个参考值进行定性评估。视觉评估表明,经典的PTD方法和SBF方法都对各种类型的复杂景观具有鲁棒性,例如大型建筑物,形状不规则的建筑物,植被的混合物以及平坦地形上的建筑物;并且它们都对数据间隙敏感,因为数据间隙可能会导致地形不连续。但是,PTD算法无法删除属于对象下部的点,并且在陡坡,植被和山坡上的建筑物混合在一起,而仅仅是山坡上的建筑物的情况下,也无法保留地面测量结果。幸好,当PTD算法失败时,SBF方法更有可能做出正确的判断。另一方面,与PTD算法相比,SBF方法无法识别通过平滑过渡(例如非常低的建筑物)连接到地形表面的对象测量值,如图中的椭圆区域所示。图5e–g和桥,如图6e–g的椭圆区域所示。
此外,定量评估遵循了ISPRS滤波器测试中提出的评估[ 17 ]。计算出三种错误,即I类错误(即遗漏错误),II类错误(即委托错误)和总错误。I类错误是被归类为对象收益的裸露土地收益百分比,而II类错误是被归类为裸露收益的物体收益百分比,总错误是任何错误归类的点的百分比。表3列出了15个参考文献中两个滤波器的三种类型的错误。
表3中的统计数据表明,两个滤波器都可以在七个数据集上实现较高的准确度,并且所有滤波结果的总误差均小于35.48%,如表3和图13c所示。相反,它们在具有数据缺口的区域(例如样本41)中都获得较低的精度。对于样本41,它们在所有参考中都具有最高的I型误差和总误差,如表3所示。。但是,通常,SBF方法的I型错误和总错误比PTD方法低得多。具体地,在15个参考文献中,有15种情况的SBF方法的I类误差低于PTD方法,除样本21和样本54以外的13种情况,SBF方法的总误差小于PTD方法。 PTD方法,如图13a,c所示。平均而言,与PTD算法相比,SBF方法的I类错误和总错误分别减少了18.26%和11.47%。但是,经典的PTD方法在避免II型错误方面也具有优势。表3中的统计数据告诉我们,在12种情况下,SBF方法具有比PTD算法更高的II类错误,如下图所示。图13b。但是,SBF方法的上述缺点并不是致命的。考虑到SBF方法可能具有较低的I型错误和总错误,与PTD方法相比,SBF将需要更少的人工干预,因为修复II型错误的成本远低于修复I型错误的成本。在自动滤波后的手动操作阶段[ 17 ]。
SBF方法的另一个缺点是,它需要另外四个指定的分割参数,如3.2节所示。根据表3中的场景复杂度和统计数据,选择CSite2和Sample 23来分析这四个参数的敏感性以及对三种类型的错误的影响,因为Sample 23具有更高的复杂度,并且经典PTD方法和PTD方法都具有较高的复杂度。 SBF方法在此示例中效果不佳;结果如图14所示。对于ķ ∈[ 10,30]和其他参数固定,I类错误从28.91%减少到18.01%,II类错误从3.87%增加到4.89%,总错误从17.07%减少到11.81%。如果k不够大,则上述明显差异归因于k对PCSS中的平面拟合的敏感性。但是,当k接近20时,这三种类型将不会发生显着变化。实际上,对于ķ ∈[ 18,26 ],I型误差从22.21%减少到22.00%,在II型误差减少从4.66%至4.48%,总的误差从13.91%减少到13.81%,尽管也有k时有轻微波动I型错误和II型错误的= 22。其他三个参数也有类似的趋势。特别地,对于α ∈[4°,11°]或- [R ∈[0.2米,0.4M]或d” ∈[2.5米,4.0米],和其它参数是固定的,三种类型的错误将不会显著改变,分别如图14b–d所示。总之,这三种类型对某些范围内的四个参数的值变化不敏感。因此,如果选择稍有不同的值,我们可以获得相似的结果。该图14也表明我们还没有微调,这些具体的例子所以出来的结果也毫不逊色,只是经验上做出的决定,因为ķ = 20,[R考虑到三种误差,= 0.3 m,d’ = 3 m和α = 5°不是最佳值。另一方面,图14c中的统计数据表明,不良分割参数所导致的过度分割或分割不足将导致不良的滤波结果。例如,在图14c中,当k = 20,r = 0.3 m,d’ = 1.0 m和α = 5°时,三种类型的误差都接近经典PDT滤波器的误差。此外,根据表1中的参数,我们得出k = 20,r = 0.3 m,d’ = 3.0 m和事实证明,对于七个数据集,α = 5°或10°或15°是可行的。换句话说,如果不考虑时间成本,则另外四个参数不会显着增加SBF方法的复杂性。根据以上统计和分析,我们得出结论,与PTD方法相比,SBF方法可显着减少I型错误和总错误,而不会显着增加算法的复杂性。但是,实际上,这四个参数的最佳值可能需要适应其他点云数据集。
SBF方法的另一个缺点是,与PTD方法相比,它需要更多的计算时间,这是由于分割的细分和迭代判断,如第2节所述。时间成本记录在表2中。平均而言,同一台计算机上SBF方法的时间成本是PDT方法的18.3倍。但是,本文关注的是滤波器的精度而不是效率,如果优化算法或考虑并行计算,则可能会解决滤波器方法的效率。
SBF方法的优点来自以下三个因素。第一个是在滤波过程中采用点云分割。特别是,如果自然地形足够平滑,则PCSS方法将在很大程度上扩展初始地面点集,如图5d和6d所示。表2的统计建议通过PCSS选择的地面种子点与最终检测到的地面点的比例接近77%。结果,增加的地面种子点数量减少了为SBF算法省略其余地面测量值的可能性。第二个是采用多重回声分析。多回波分析有助于检测植被测量值,这将减少要判断的点数,并减少可能的误差。最后但并非最不重要的因素是经典PTD方法流程图的继承。如上所述,PTD方法是一种出色的滤波器,由于TerraSolid商业软件的普及,它已被广泛应用。SBF方法充分利用了经典PTD算法的流程图。然而,将PCSS嵌入PTD也是一把双刃剑。点云分割也使SBF方法更有可能将附着在地形上的一些小物体点视为地面点,如果该场景中的小物体较多,则可能会增加SBF方法的II型误差。表3和图13b。
4.5 SBF与其他算法之间的性能评估
如上所述,Sithole和Vosselman [ 17 ] 提出了八种滤波算法。它们之间在滤波精度上具有可比性。因此,在SBF方法和八个滤波器之间也进行了定量评估。图15a-c分别显示了15个参考文献中经典的8个滤波器和SBF方法的三种错误类型。
图15a,b这表明,SBF方法具有较低的I型错误和总错误。具体地,在15个参考文献中,有两种情况是SBF方法的I型错误最低,有五种情况是SBF方法的I型错误第二低,有四种情况是SBF方法的错误率第三低。类似地,在一种情况下,SBF方法的总误差为最低,在四种情况下,SBF方法的总误差为第二低,并且在四种情况下,SBF方法的总误差为第二。第三低。此外,SBF方法的类型I误差和总误差均低于八个滤波器的相应平均值。但是,八种滤波方法中的大多数II型错误均比SBF方法低,图15b。总的来说,与大多数经典的八种滤波方法相比,SBF方法具有较低的I型误差和总误差,但具有较高的II型误差,这表明SBF方法的优缺点与4.4节相同。
5 结论
滤波是ALS点云的核心后处理步骤之一,已经提出了许多滤波器来解决此问题。其中,PTD被广泛用作基于表面的PTD之一。但是,即使采用了镜像技术,PTD也无法去除物体的下部并保持陡峭地形区域的地面测量。实践表明,基于表面的滤波器和基于分割的滤波器的组合能够克服上述缺点。因此,通过将PTD框架和PCSS方法相结合,提出了一种基于分割的滤波方法。实验利用ISPRS委员会III /工作组III的7个数据集来验证SBF方法。此外,使用来自子区域的15个参考样本来计算所提出方法的精度。结果表明,SBF方法和经典PTD都对各种类型的景观都具有鲁棒性。但是,SBF方法在删除车辆尺寸和保留地面尺寸方面比经典的PTD方法更好。特别是,它可能具有比PTD算法低得多的I型错误和总错误,尽管它可能具有较高的II型错误,这将减少后续手动校正的成本。但是,当SBF方法面对附着在地面上的物体(例如桥梁,坡道,尽管它可能具有更高的II型错误,但它可能具有比PTD算法低得多的I型错误和总错误,这将减少后续手动校正的成本。但是,当SBF方法面对附着在地面上的物体(例如桥梁,坡道,尽管它可能具有更高的II型错误,但它可能具有比PTD算法低得多的I型错误和总错误,这将减少后续手动校正的成本。但是,当SBF方法面对附着在地面上的物体(例如桥梁,坡道,等;而且它对大数据缺口也很敏感。如果将SBF方法与Sithole和Vosselman提出的八种滤波算法进行比较,可以得出类似的结论[ 17 ]。未来的工作将集中于改进所提出的滤波器以减少II型错误,引入马尔科夫随机场模型[ 48 ]来分析段的空间拓扑,采用多源数据融合[ 49 ]并并行计算执行以提高效率。
致谢
这项研究的经费来自:(1)由中国国家自然科学基金会(NSFC)赞助的通用计划,资助号为41371405;(2)国家基础测绘科技计划项目,分别为面向对象的移动激光扫描点云分类和立面的3D重建方法研究,软件开发和应用演示。感谢德国航空航天中心(DLR)的崔世勇在英语水平方面的帮助。
作者贡献
两位作者都为本文提出的工作做出了广泛的贡献。
利益冲突
作者宣称没有利益冲突。
参考文献
1 Zhang, J.X.; Lin, X.G.; Ning, X.G. SVM-based classification of segmented airborne LiDAR point clouds in urban areas. Remote Sens 2013, 5, 3749–3775. [Google Scholar]
2 Shan, J.; Sampath, A. Urban DEM generation from raw Lidar data: A labeling algorithm and its performance. Photogramm. Eng. Remote Sens 2005, 71, 217–226. [Google Scholar]
3 Zhang, J.X.; Lin, X.G. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm 2013, 81, 44–59. [Google Scholar]
4 Maas, H.G.; Vosselman, G. Two algorithms for extracting building models from raw laser altimetry data. ISPRS J. Photogramm. Remote Sens 1999, 54, 153–163. [Google Scholar]
5 Rutzinger, M.; Rottensteiner, F.; Pfeifer, N. A comparison of evaluation techniques for building extraction from airborne laser scanning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2009, 2, 11–20. [Google Scholar]
6 Huang, H.; Brenner, C.; Sester, M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data. ISPRS J. Photogramm. Remote Sens 2013, 79, 29–43. [Google Scholar]
7 Wang, R. 3D building modeling using images and LiDAR: A review. Int. J. Image Data Fusion 2013, 4, 273–292. [Google Scholar]
8 Oude Elberink, S.; Vosselman, G. 3D information extraction from laser point clouds covering complex road junctions. Photogramm. Rec 2009, 24, 23–36. [Google Scholar]
9 Koch, B.; Heyder, U.; Weinacker, H. Detection of individual tree crowns in airborne LiDAR data. Photogramm. Eng. Remote Sens 2006, 72, 357–363. [Google Scholar]
10 Liu, J.P.; Shen, J.; Zhao, R.; Xu, S.H. Extraction of individual tree crowns from airborne LiDAR data in human settlements. Math. Comput. Model 2013, 58, 524–535. [Google Scholar]
11 Hyyppä, J.; Yu, X.; Hyyppä, H.; Vastaranta, M.; Holopainen, M.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Vaaja, M.; Koskinen, J.; et al. Advances in forest inventory using airborne laser scanning. Remote Sens 2012, 4, 1190–1207. [Google Scholar]
12 Wang, C.; Menenti, M.; Stoll, M.P.; Feola, A.; Belluco, E.; Marani, M. Separation of ground and low vegetation signatures in LiDAR measurements of salt-marsh environments. IEEE Trans. Geosci. Remote Sens 2009, 47, 2014–2023. [Google Scholar]
13 French, J.R. Airborne LiDAR in support of geomorphological and hydraulic modelling. Earth Surf. Process. Landf 2003, 28, 321–335. [Google Scholar]
14 Hutton, C.J.; Brazier, R.E. Quantifying riparian zone structure from airborne LiDAR: Vegetation filtering, anisotropic interpolation, and uncertainty propagation. J. Hydrol 2012, 442–443, 36–45. [Google Scholar]
15 Lin, X.G.; Zhang, R.; Shen, J. A template-matching based approach for extraction of roads from very high resolution remotely sensed imagery. Int. J. Image Data Fusion 2012, 3, 149–168. [Google Scholar]
16 Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens 2010, 2, 833–860. [Google Scholar]
17 Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens 2004, 59, 85–101. [Google Scholar]
18 Tóvári, D.; Pfeifer, N. Segmentation based robust interpolation-a new approach to laser data filtering. Int. Arch. Photogramm. Remote Sens 2005, 36, 79–84. [Google Scholar]
19 Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens 1998, 53, 193–203. [Google Scholar]
20 Vosselman, G. Slope based filtering of laser altimetry data. Int. Arch. Photogramm. Remote Sens 2000, 33, 935–942. [Google Scholar]
21 Sithole, G.; Vosselman, G. Filtering of laser altimetry data using a slope adaptive filter. Int. Arch. Photogramm. Remote Sens 2001, 34, 203–210. [Google Scholar]
22 Susaki, J. Adaptive slope filtering of airborne LiDAR data in urban areas for digital terrain model (DTM) generation. Remote Sens 2012, 4, 1804–1819. [Google Scholar]
23 Chen, Q.; Gong, P.; Baldocchi, D.; Xie, G. Filtering airborne laser scanning data with morphological methods. Photogramm. Eng. Remote Sens 2007, 73, 175–185. [Google Scholar]
24 Zhang, K.Q.; Chen, S.C.; Whitman, D.; Shyu, M.L.; Yan, J.H.; Zhang, C.C. A progressive morphological filter for removing nonground measurements from airborne LIDAR data. IEEE Trans. Geosci. Remote Sens 2003, 41, 872–882. [Google Scholar]
25 Briese, C.; Pfeifer, N.; Dorninger, P. Applications of the robust interpolation for DTM determination. Int. Arch. Photogramm. Remote Sens 2002, 34, 55–61. [Google Scholar]
26 Kobler, A.; Pfeifer, N.; Ogrinc, P.; Todorovski, L.; Oštir, K.; Džeroski, S. Repetitive interpolation: A robust algorithm for DTM generation from aerial laser scanner data in forested terrain. Remote Sens. Environ 2007, 108, 9–23. [Google Scholar]
27 Axelsson, P.E. DEM generation from laser scanner data using adaptive TIN models. Int. Arch. Photogramm. Remote Sens 2000, 32, 110–117. [Google Scholar]
28 Zhu, X.K.; Toutin, T. Land cover classification using airborne LiDAR products in Beauport, Québec, Canada. Int. J. Image Data Fusion 2013, 4, 252–271. [Google Scholar]
29 Lohmann, P. Segmentation and filtering of laser scanner digital surface models. Int. Arch. Photogramm. Remote Sens 2002, 34, 311–315. [Google Scholar]
30 Lee, I. A Feature Based Approach to Automatic Extraction of Ground Points for DTM Generation from LiDAR Data. Proceedings of the ASPRS Annual Conference, Denver, CO, USA, 23–28 May 2004.
31 Sithole, G.; Vosselman, G. Filtering of airborne laser scanner data based on segmented point clouds. Int. Arch. Photogramm. Remote Sens 2005, 36, 66–71. [Google Scholar]
32 Shen, J.; Liu, J.P.; Lin, X.G.; Zhao, R. Object-based classification of airborne light detection and ranging point clouds in human settlements. Sens. Lett 2012, 10, 221–229. [Google Scholar]
33 Yan, M.; Blaschke, T.; Liu, Y.; Wu, L. An object-based analysis filtering algorithm for airborne laser scanning. Int. J. Remote Sens 2012, 33, 7099–7116. [Google Scholar]
34 Arya, S.; Mount, D.M.; Netanyahu, N.S.; Silverman, R.; Wu, A.Y. An optimal algorithm for approximate nearest neighbor searching in fixed dimensions. J. ACM 1998, 45, 891–923. [Google Scholar]
35 Filin, S.; Pfeifer, N. Segmentation of airborne laser scanning data using a slope adaptive neighborhood. ISPRS J. Photogramm. Remote Sens 2006, 60, 71–80. [Google Scholar]
36 Melzer, T. Non-parametric segmentation of ALS point clouds using mean shift. J. Appl. Geod 2007, 1, 159–170. [Google Scholar]
37 Wang, M.; Tseng, Y.H. Automatic segmentation of LiDAR data into coplanar point clusters using an octree-based split-and-merge algorithm. Photogramm. Eng. Remote Sens 2010, 76, 407–420. [Google Scholar]
38 Rottensteiner, F. Automatic generation of high-quality building models from LiDAR data. IEEE Comput. Graph. Appl 2003, 23, 42–50. [Google Scholar]
39 Vosselman, G.; Klein, R. Visualization and Structuring of Point Clouds. In Airborne and Terrestrial Laser Scanning, 1st ed; Vosselman, G., Maas, H.G., Eds.; Whittles Publising: Dunbeath, UK, 2010; pp. 43–79. [Google Scholar]
40 Chen, D.; Zhang, L.; Li, J.; Liu, R. Urban building roof segmentation from airborne lidar point clouds. Int. J. Remote Sens 2012, 33, 6497–6515. [Google Scholar]
41 Rabbani, T. Automatic Reconstruction of Industrial Installations Using Point Clouds and Images. Netherlands Commission of Geodesy, Delft, The Netherlands, 2006. [Google Scholar]
42 Moffiet, T.; Mengersen, K.; Witte, C.; King, R.; Denham, R. Airborne laser scanning: Exploratory data analysis indicates potential variables for classification of individual trees or forest stands according to species. ISPRS J. Photogramm. Remote Sens 2005, 59, 289–309. [Google Scholar]
43 Wang, O. Using Aerial LiDAR to Segment and Model Buildings. University of California, Santa Cruz, CA, USA, 2006. [Google Scholar]
44 Darmawati, A.T. Utilization of Multiple Echo Information for Classification of Airborne Laser Scanning Data. International Institute for Geo-information Science and Observation, Enschede, The Netherlands, 2008. [Google Scholar]
45 Höfle, B.; Hollaus, M.; Hagenauer, J. Urban vegetation detection using radiometrically calibrated small-footprint full-waveform airborne LiDAR data. ISPRS J. Photogramm. Remote Sens 2012, 67, 134–147. [Google Scholar]
46 A Two-Dimensional Quality Mesh Generator and Delaunay Triangulator. Available online: http://www.cs.cmu.edu/~quake/triangle.html (accessed on 11 October 2011).
47 ANN: A Library for Approximate Nearest Neighbor Searching. Available online: http://www.cs.umd.edu/~mount/ANN/ (accessed on 15 March 2010).
48 Seetharaman, K.; Palanivel, N. Texture characterization, representation, description, and classification based on full range gaussian markov random field model with bayesian approach. Int. J. Image Data Fusion 2013, 4, 342–362. [Google Scholar]
49 Akiwowo, A.; Eftekhari, M. Feature-based detection using Bayesian data fusion. Int. J. Image Data Fusion 2013, 4, 308–323. [Google Scholar]
遥感06 01294f1 1024图1. Axelsson的渐进式TIN(三角不规则网络)致密化(PTD)滤波器的典型误差。(a)台阶边缘周围的点云;(b)(a)中点云的滤波结果;(c)市区内车辆密集的点云;(d)(c)中点云的滤波结果。
遥感06 01294f2 1024图2. 基于分割的滤波(SBF)方法的流程图。
遥感06 01294f3 1024图3. 点云平滑分割(PCSS)的参数。对于具有法向矢量和跨种子点的拟合平面的种子点,请选择其与种子点的3D距离在d’内的相邻点。在相邻点之间,将与种子点的角度差小于α且与拟合平面的距离小于r的点添加到线段。
遥感06 01294f4 1024图4. SBF方法的进展和一些所需的参数。(a)点云;(b)点云分割的结果;(c)选择地面种子部分;(d)按照(c)中的要点建造TIN;(e)测量角度和距离;(f)镜像过程。
遥感06 01294f5a 1024遥感06 01294f5b 1024遥感06 01294f5c 1024图5. 有关CSite1的测试数据的滤波和结果:(a)离群值去除后的剩余点云;(b)(a)中数据的TIN;(c)PCSS的分割结果;(d)通过分割的多次回波分析检测到的植被测量;(e)检测到的带有标签编号的地面种子段;(f)通过SBF方法检测到的地面测量;(g)通过经典的PTD方法检测到的地面测量;(h)(f)与(g)之间的差异。
遥感06 01294f6a 1024遥感06 01294f6b 1024图6. 有关CSite2的测试数据的滤波和结果:(a)离群值去除后的剩余点云;(b)(a)中数据的TIN;(c)PCSS的分割结果;(d)通过分割块的多次回波分析检测到的植被测量;(e)检测到的带有标签编号的地面种子段;(f)通过SBF方法检测到的地面测量;(g)通过经典的PTD方法检测到的地面测量;(h)(f)与(g)之间的差异。
遥感06 01294f7 1024图7. 样本11的参考数据的滤波和结果:(a)数字表面模型(DSM);(b)参考DEM;(c)根据PTD方法的结果生成的DEM;(d)PTD方法的I类错误,II类错误;(e)根据SBF方法的结果生成的DEM;(f)SBF方法的I型错误,II型错误。请注意,DSM和DEM都是基于TIN的。
遥感06 01294f8 1024图8. 样本24的参考数据的滤波和结果:(a)DSM;(b)参考DEM;(c)根据PTD方法的结果生成的DEM;(d)PTD方法的I类错误,II类错误;(e)根据SBF方法的结果生成的DEM;(f)SBF方法的I型错误,II型错误。请注意,DSM和DEM都是基于TIN的。
遥感06 01294f9 1024图9. 样本51的参考数据的滤波和结果:(a)DSM;(b)参考DEM;(c)根据PTD方法的结果生成的DEM;(d)PTD方法的I类错误,II类错误;(e)根据SBF方法的结果生成的DEM;(f)SBF方法的I型错误,II型错误。请注意,DSM和DEM都是基于TIN的。
遥感06 01294f10 1024图10. 样本53的参考数据的滤波和结果:(a)DSM;(b)参考DEM;(c)根据PTD方法的结果生成的DEM;(d)PTD方法的I类错误,II类错误;(e)根据SBF方法的结果生成的DEM;(f)SBF方法的I型错误,II型错误。请注意,DSM和DEM都是基于TIN的。
遥感06 01294f11a 1024遥感06 01294f11b 1024图11. 样品71的参考数据的滤波和结果:(a)DSM;(b)参考DEM;(c)根据PTD方法的结果生成的DEM;(d)PTD方法的I类错误,II类错误;(e)根据SBF方法的结果生成的DEM;(f)SBF方法的I型错误,II型错误。请注意,DSM和DEM都是基于TIN的。
遥感06 01294f12 1024图12. 样本12的参考数据的滤波和结果:(a)根据PTD方法的结果生成的DEM;(b)根据SBF方法的结果生成的DEM。请注意,这两个DEM都是基于TIN的。
遥感06 01294f13 1024图13. 两种方法的三种错误类型的比较:(a)样本的不同算法的I类错误;(b)样本不同算法的II型误差;(c)两种算法的样本总误差。注意“ S”是水平字幕的缩写。
遥感06 01294f14 1024图14.分别 分析输入参数k和α的灵敏度及其对样本23的三种误差的影响。(a)当r = 0.3 m,d’时,k值和相应的三种误差= 3.0 m和α = 5°;(b)当k = 20,r = 0.3 m,d’ = 3.0 m 时,α值和相应的三种误差类型;(c)当k = 20,r时d’的值和相应的三种误差= 0.3 m,α = 5°;(d)当k= 20,d′= 3.0m,α= 5° 时,r的值和相应的三种误差。
遥感06 01294f15 1024图15. SBF方法的三种错误类型与[ 17 ]中的八种方法的比较:(a)样本的不同算法的I类错误;(b)样本不同算法的II型误差;(c)两种算法的样本总误差。注意“ S”是水平字幕的缩写。
表表1. 用于每个站点的两个滤波器的输入参数。
表表2. 有关每个站点的两个滤波器的滤波结果的统计信息。
表表3. 两个滤波器的三种类型的误差,即 PTD方法和SBF方法。
这篇关于《文献翻译》Part3 基于地形分割渐进加密的机载LiDAR点云滤波的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






