景深专题
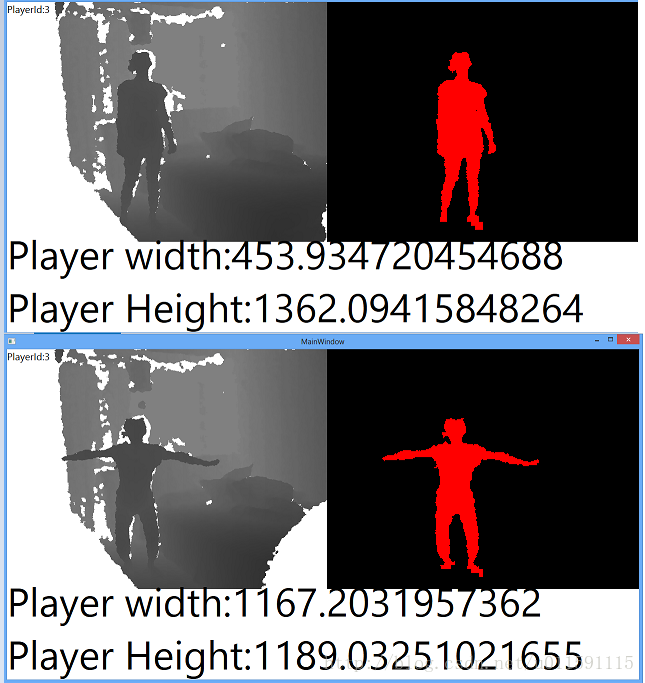
Kinect for windows 开发入门 八:景深数据获取和使用 下
背景知识 1. 前面已经有提到,所谓直方图就是不同深度的像素分布图。 2. Player id只有在打开SkeletonStream的时候才会产生。 SkeletonStream skeletonStream =kinectSensor.SkeletonStream; skeletonStream.Enable(); Playerid是动态分配的,同一个人走出视线再回来

Kinect for windows 开发入门 七:景深数据获取和使用 上
背景知识 1. 景深数据通过Kinect红外传感器(红外发射器和摄像头)获取。 2. 红外摄像机的视场是金字塔形状的。离摄像机远的物体比近的物体拥有更大的视场横截面积。这意味着影像的高度和宽度,比如640X480和摄像机视场的物理位置并不一一对应。但是每个像素的深度值是和视场中物体离摄像机的距离是对应的。 3. Kinect中深度值最大为4096mm,0值
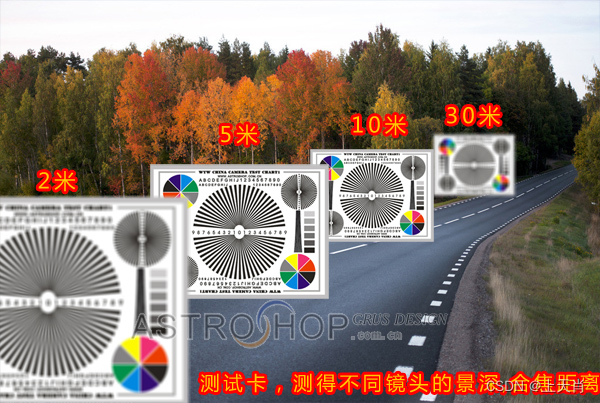
工业镜头孔径、分辨率与景深参数简析
工业镜头孔径、分辨率与景深参数简析 一、前言二、镜头孔径与光圈系数2.1孔径与相对孔径2.2数值孔径(NA)2.3光圈系数(F/#)2.4工作光圈系数((F/#)w) 三、镜头分辨率3.1MTF与CTF3.1.1MTF(调制传递函数,Modulation Transfer Function)3.1.2CTF(对比度传递函数,Contrast Transfer Function) 3.2空间频
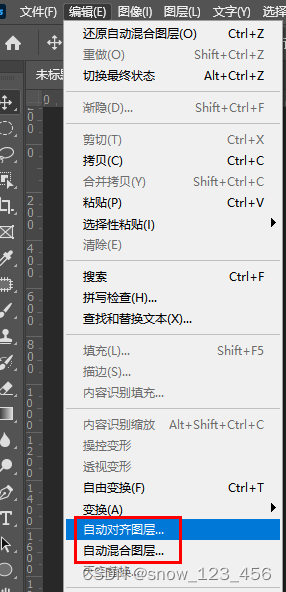
11【PS Blender 作图】场景作图 景深
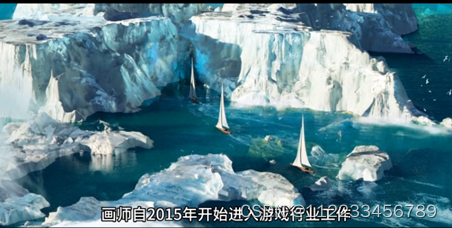
【问题背景】 看下图,是一个插画师的作图,是不是好像现实场景;合理利用景深,让画面好像是3D现实场景 那么如何才能完成这样让人身临其境的画面呢? 大体有两个方法: 【1】2D插画,合理利用景深;如用PS画图,在画图的时候注意 画面构图,让2D的画面,看起来像3D 缺点是:画面不能动,如果要移动画面,转化视角,需要重新构图,重新画图 【2】3D建模;如用blender等建模软件,构建出图

2D图片3秒变立体,Adobe实习生的智能景深算法,登上顶级期刊
来源:本文经AI新媒体量子位(公众号 ID: QbitAI)授权转载 本文约2500字,建议阅读8分钟。 本文为你介绍了Adobe放出的新魔法,2-3秒拍出立体感。 你离礁石越来越近,仿佛还有一秒就要触礁了。 不过这张动图,并不是从人类拍摄的视频里截下来的。
【研究】光场相机测速技术中景深方向不确定性的改进方法
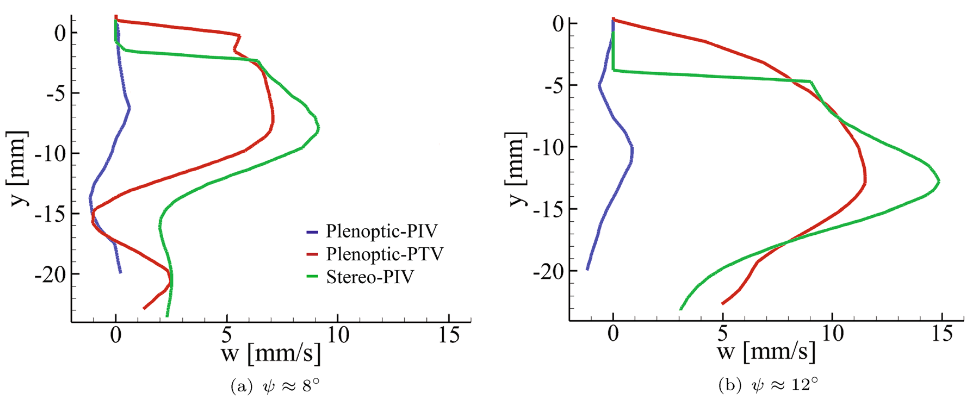
本项研究详细介绍了一种基于光场相机的粒子追踪测速(PTV)算法,旨在对三维速度场的三分量进行精细化测量。算法核心在于利用相机视角的多样性,辅以三角化测量和粒子追踪技术,有效优化了光场粒子图像测速(PIV)实验中常见的景深方向不确定性难题。 首先采用Light Field Ray Bundling(LFRB)技术进行三维位置评估,框架如图1所示,通过图像数据与物理空间的映射函数将粒子光线投影至测量

bilibili景深对焦banner效果
bilibili景深对焦banner效果 效果分析 benner共分为6个图层,6个图层在鼠标hover状态下改变translatex和blur 鼠标在左边,1,2两图较为清晰 鼠标在中间,3,4两图较为清晰 鼠标在右边,5,6两图较为清晰 6个图片,按照顺序排列,图片垂直水平居中,填充整个父元素; object-fit、object-position 用于对图片进行剪切、

web蓝桥杯真题:为图片添加景深效果
代码: // 请在这里编写代码,根据需求,使得图片达到景深效果document.querySelector('.img1').style.filter = 'blur(0px)'document.querySelector('.img2').style.filter = 'blur(0px)' 知识点: 元素模糊 div {filter: blur(0px) //不模糊}di
相机图像质量研究(5)常见问题总结:光学结构对成像的影响--景深
系列文章目录 相机图像质量研究(1)Camera成像流程介绍 相机图像质量研究(2)ISP专用平台调优介绍 相机图像质量研究(3)图像质量测试介绍 相机图像质量研究(4)常见问题总结:光学结构对成像的影响--焦距 相机图像质量研究(5)常见问题总结:光学结构对成像的影响--景深 相机图像质量研究(6)常见问题总结:光学结构对成像的影响--对焦距离 相机图像质量研究(7)常见问题总结:
分布式光线追踪模拟景深效果
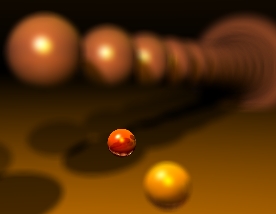
本文为spanzhang(张友邦)原创,发布地址为:http://blog.csdn.net/spanzhang,转载请注明出处。 如果你还不知道景深是什么意思,可以随便找本摄影的入门书籍看看。景深是在大光圈下显示的特别的摄影效果,它能把焦点前后的景物虚化(所谓的焦外成像,Out of Focus),虚化的形状和快门的孔形有关。当光圈孔很小的时候,景深很大,光圈大的时候景深小。这里有一个关于景深
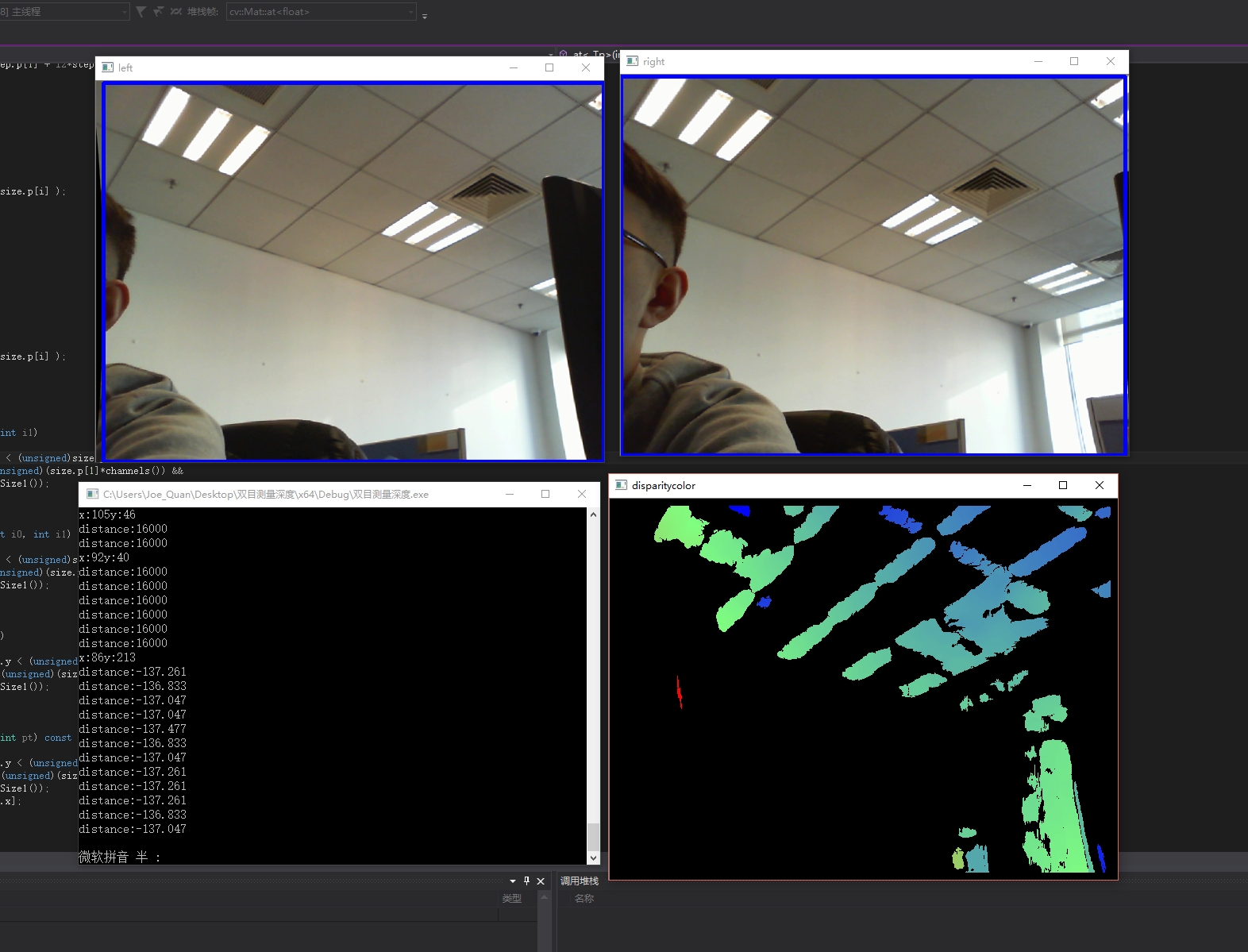
【计算机视觉】 完全基于opencv的双目景深与测距的实现
转载 Joe_quan的 http://blog.csdn.net/hysteric314/article/details/50456570?locationNum=3&fps=1 目录 目录说明双目测距原理opencv实现双目测距的原理双目测距代码说明双目测距的代码和实现接下来 1 说明 怕以后忘了,现在总结一下前一段时间一直在弄的,有关双目视觉的东西。

HTML5+CSS3+JS小实例:交互式图片鼠标悬停景深对焦效果
实例:交互式图片鼠标悬停景深对焦效果 技术栈:HTML+CSS+JS 效果: 源码: 【HTML】 <!DOCTYPE html><html><head><meta http-equiv="content-type" content="text/html; charset=utf-8"><meta name="viewport" content="width=device-widt
HTML5+CSS3+JS小实例:交互式图片鼠标悬停景深对焦效果
实例:交互式图片鼠标悬停景深对焦效果 技术栈:HTML+CSS+JS 效果: 源码: 【HTML】 <!DOCTYPE html><html><head><meta http-equiv="content-type" content="text/html; charset=utf-8"><meta name="viewport" content="width=device-widt
【透视课笔记】L4距离感与景深建立
一、大纲 这期主要讲大场景里面的一些透视关系。 二、距离感 在画面当中,可能存在着这样一种情况,场景中的物体符合透视关系,但是没有距离。也就是画面里面的一些等距物体没有按照透视的景深关系,导致失去了场景的远近感。 正确的景深暗示 没有交错的影子作为暗示就会缺少景深感。 通过光影 以及其他的等价物体才能判断场景中的一些物体进到画面有多深的距离 水波以及海浪 电线杆 树木 这
景深效果(Depth of Field)
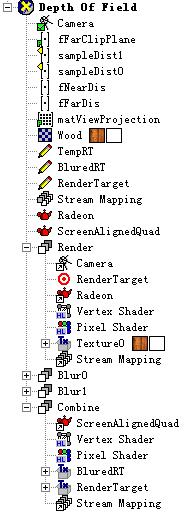
什么是景深效果? 景深效果,简称DOF,在人眼跟光学摄像设备上很常见.如下图: 简单地来说,就是近处跟远处的景物模糊,而焦点附近的物体则很清晰.至于为什么会产生这样的效果,我就懒得说了:p 那么怎么来实现这种效果呢? 看图: 从摄像机开始,按距离分成三部分: 近距离模糊,焦点范围(清晰),远距离模糊 渲染的时候按深度(即距离

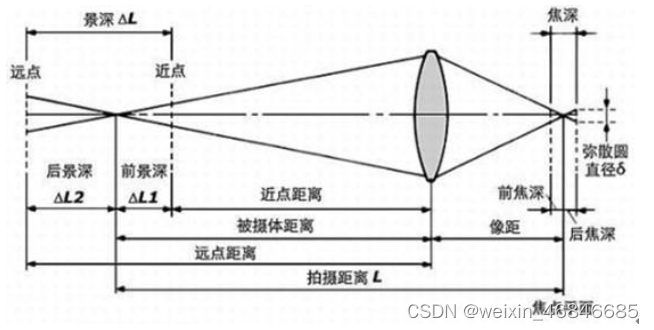
光学变焦----景深=景深远界-景深近界
http://detail.zol.com.cn/product_param/index232.html 景深近界=焦距的平方*物距/(焦距的平方+可容许弥散圆直径*光圈系数*物距) 景深远界=焦距的平方*物距/(焦距的平方-可容许弥散圆直径*光圈系数*物距) 景深=景深远界-景深近界 注1:单位----毫米 注2:此为简化了的计算公式。精确的公式中,包含了像距,因一般摄影中,物距远大

转载:如何用PS淡化模糊背景,控制景深
转载网址:http://wwwghks.blog.163.com/blog/static/10679862008027028570/ 普通DC就是用最大的光圈,也很难做到模糊背景的效果.其补救的方法就买个DSLR或着花点时间学PS. 其实DSLR模糊背景也不是万能的,就象我这张用大白拍的照片,背景跟鸟和乌龟特别接近,没有可能淡化背景.为了是主体更突出,可以来个二次创作.将背景做一些处理.