对点专题
python使用Open3D 对点云重建与c++使用PCL对点云进行重建哪个效率更高
确定哪个库更高效取决于多个因素,包括算法实现、优化程度、硬件配置等。通常情况下,C++ 的 PCL 库在性能方面可能会比 Python 的 Open3D 库更高,因为 C++ 语言的编译器可以生成更高效的机器码,并且 PCL 库的底层实现是经过高度优化的。 但是,这并不意味着在所有情况下都是如此。在某些情况下,Python 的代码可能更加简洁易用,而且 Python 可以利用底层 C/C++
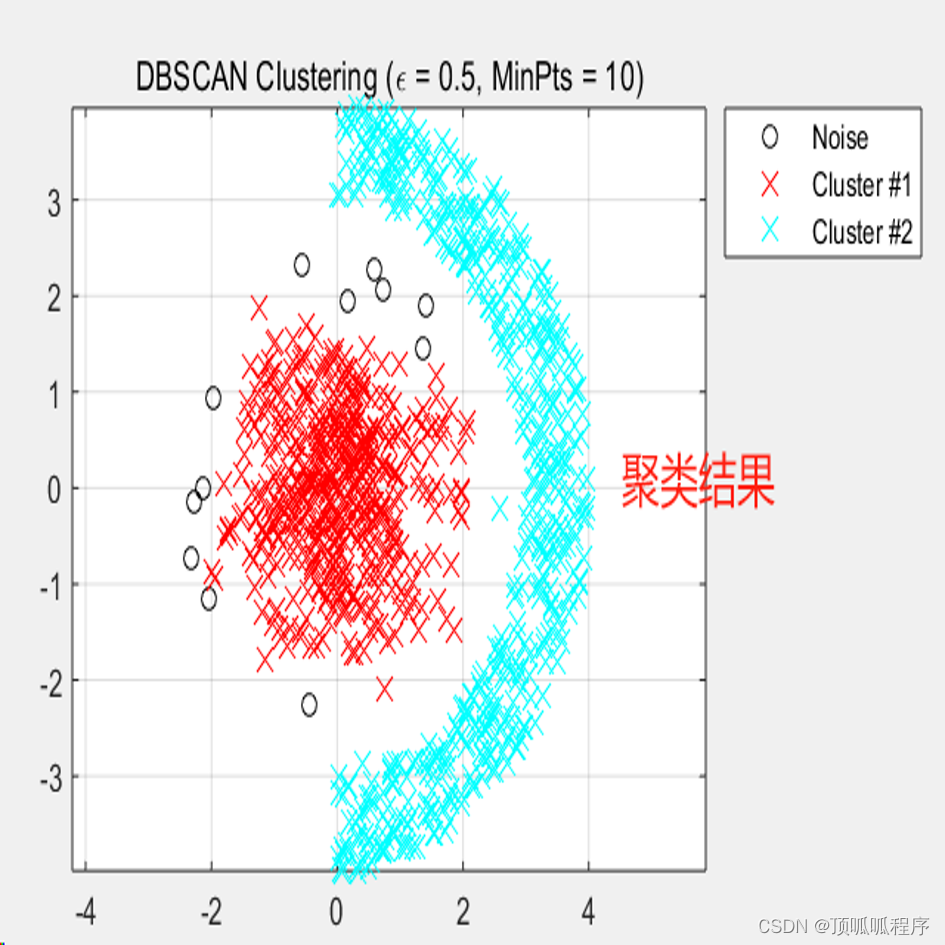
159基于matlab的基于密度的噪声应用空间聚类(DBSCAN)算法对点进行聚类
基于matlab的基于密度的噪声应用空间聚类(DBSCAN)算法对点进行聚类,聚类结果效果好,DBSCAN不要求我们指定集群的数量,避免了异常值,并且在任意形状和大小的集群中工作得非常好。它没有质心,聚类簇是通过将相邻的点连接在一起的过程形成的。优于kmeans。程序已调通,可直接运行。 159基于密度的噪声应用空间聚类 无监督学习 (xiaohongshu.com)
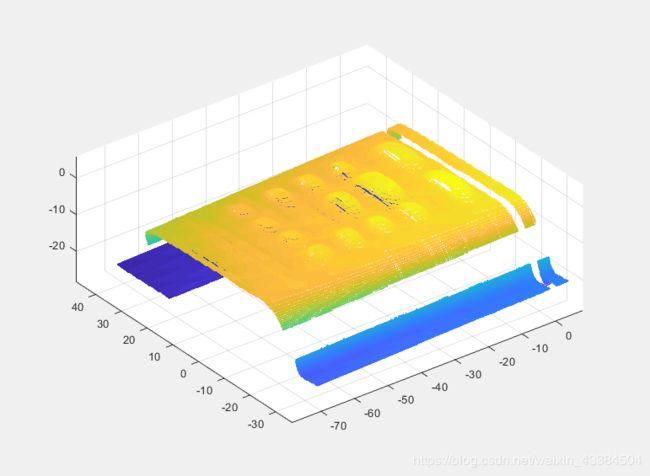
matlab 可视化点云,matlab(对点云的简单处理)
虽然用pcl比较多,但是pcl运行比较慢,我很多时候还是喜欢用matlab做一个算法的验证; 项目主要是做一个物体的分割处理。 1.对物体做去噪处理 clc; clear; B=pcread('test(1).ply'); figure(1); pcshow(B); C=pcdenoise(B,'NumNeighbors',90,'Threshold',1); figure(2); pcshow
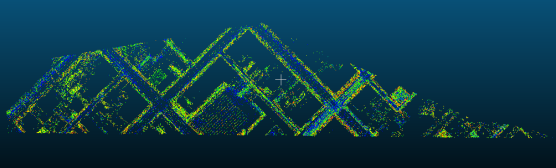
机器学习之利用k-means算法对点云数据进行目标分割,提取其中的建筑物、房屋等
原始点云数据在CloudCompare的显示如下: 利用k-means算法提取出其中的建筑物、房屋等,我这里的代码是根据k-means算法的原理编写的代码,这样有助于大家对k-means算法的运行原理有一个深层次的了解,当然也可以直接调用sklearn里的算法,但是那样的话对于将来发展是不利的,毕竟知道算法的原理并根据原理编写代码学到的知识还是更多一些的。 代码如下: #Author
PCL对点云进行曲面拟合Surface Fitting(Curve Fitting升维版)
1. 使用PCL进行曲面surface拟合 绿色点为原始输入点云,红色曲线和灰色曲面均为拟合结果。 1.1 使用B-spline样条曲面拟合曲面,如果发现显示窗口未响应,则应该给代码中的viewer.spinOnce()添加参数,如viewer.spinOnce(3000) 1.2 输入点云格式应该是PointXYZ,不能有RGB分量。如果想要改变点云格式,应该将typedef pcl::

PCL点云处理之使用变换矩阵对点云去中心化(二百零七)
PCL点云处理之使用变换矩阵对点云去中心化(二百零七) 一、算法介绍二、算法实现1.代码2.效果 三、总结 一、算法介绍 点云去中心化是点云处理中的一种常见操作,借助PCL可以很快实现这一处理,具体处理步骤如下 1、计算点云中心,这个有现成函数直接调用 2、构建偏移变换矩阵,通过变换函数快速对点云去中心化 3、点云的读取和写出 二、算法实现 1.代码 #include <i
PCL点云处理之使用变换矩阵对点云去中心化(二百零七)
PCL点云处理之使用变换矩阵对点云去中心化(二百零七) 一、算法介绍二、算法实现1.代码2.效果 三、总结 一、算法介绍 点云去中心化是点云处理中的一种常见操作,借助PCL可以很快实现这一处理,具体处理步骤如下 1、计算点云中心,这个有现成函数直接调用 2、构建偏移变换矩阵,通过变换函数快速对点云去中心化 3、点云的读取和写出 二、算法实现 1.代码 #include <i

基于matlab点云工具箱对点云进行处理四:对点云进行欧式聚类,并获得包围点云簇的外接凹多边形
基于matlab点云工具箱对点云进行处理四:对点云进行欧式聚类,并获得包围点云簇的外接凹多边形 步骤: 读取velodyne数据包pcap文件内的点云数据使用pcdownsample函数对点云数据进行体素化采样,减少点云数量使用find函数对点云进行筛选使用pcdnoise去除点云内的噪声使用pcsegdist进行欧式聚类使用boundary获得外包顶点对顶点进行整理,输出 相关程序代码点

基于matlab点云工具箱对点云进行处理三:对点云进行欧式聚类,使用三角剖分处理后获取点云簇的外接凸多边形
基于matlab点云工具箱对点云进行处理三:对点云进行欧式聚类,使用三角剖分处理后获取点云簇的外接凸多边形 步骤: 读取velodyne数据包pcap文件内的点云数据使用pcdownsample函数对点云数据进行体素化采样,减少点云数量使用find函数对点云进行筛选使用pcdnoise去除点云内的噪声使用pcsegdist进行欧式聚类使用delaunayTriangulation进行三角剖分使

基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形
基于matlab点云工具箱对点云进行处理二:对点云进行欧式聚类,获得聚类后点云簇的外接矩形 步骤: 读取velodyne数据包pcap文件内的点云数据使用pcdownsample函数对点云数据进行体素化采样,减少点云数量使用find函数对点云进行筛选使用pcdnoise去除点云内的噪声使用pcsegdist进行欧式聚类使用自定义函数getBoundary获得外接矩形,函数具体定义见附件 相关
基于matlab点云工具箱对点云进行处理一:去除地面,保留剩下的点
基于matlab点云工具箱的点云地面分割(去除地面,保留剩下的点) 步骤: 读取velodyne数据包pcap文件内的点云数据使用pcdownsample函数对点云数据进行体素化采样,减少点云数量使用find函数对点云进行筛选使用pcdnoise去除点云内的噪声筛选低点的点云(地面一般较低)使用pcfitplane函数匹配平面(地面)输出 相关文件点我下载https://download.c